








 本文深入探讨了Dogleg方法在优化算法中的应用,特别是在梯度下降和信赖域算法的结合上。文章对比了Dogleg方法与柯西方法在下降步长计算上的不同,详细解释了Dogleg方法如何选择更优的下降方向,以及在不同情况下如何确定最佳的下降步长。
本文深入探讨了Dogleg方法在优化算法中的应用,特别是在梯度下降和信赖域算法的结合上。文章对比了Dogleg方法与柯西方法在下降步长计算上的不同,详细解释了Dogleg方法如何选择更优的下降方向,以及在不同情况下如何确定最佳的下降步长。
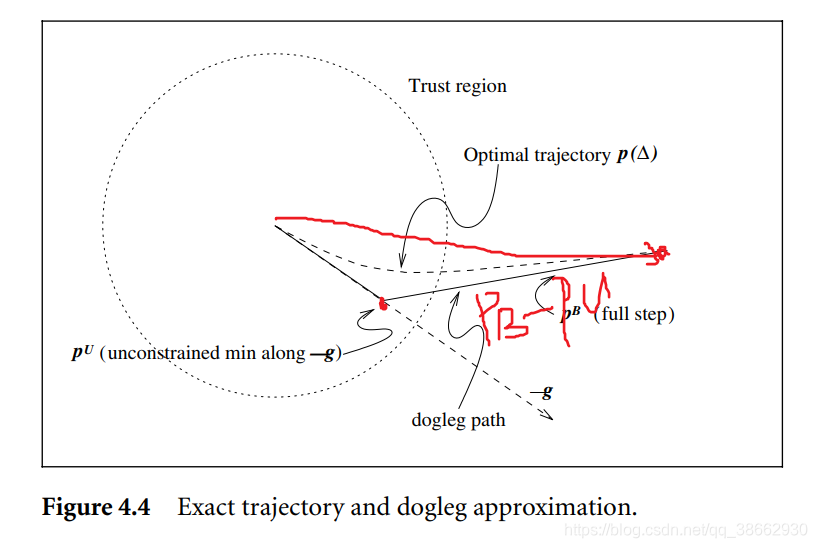
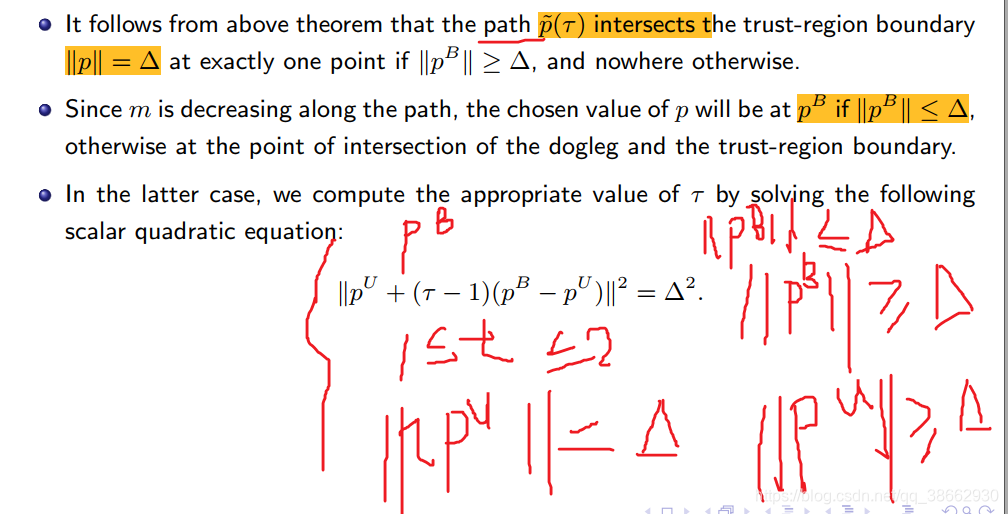
上文中提到的近似柯西方向是延梯度方向下降一定步长,但是没有充分利用B矩阵,为此DOgleg 方法,当PB在信赖域中时利用PB,否则的话利用梯度方向下降一定步长,并且下降步长的计算方法也有所不同:
在柯西方法中是
τ
Δ
/
∣
∣
g
∣
∣
\tau\Delta/||g||
τΔ/∣∣g∣∣,而Dogleg 中下降步长
a
=
−
g
T
g
g
T
B
g
a=-\frac{g^Tg}{g^TBg}
a=−gTBggTg

P
k
B
P_k^B
PkB是全局最优点,如果其在可行域当中的话,理所当然,我们应将它作为更新步

省支二次项后沿梯度方向下降最快,下降步长为
Δ
\Delta
Δ

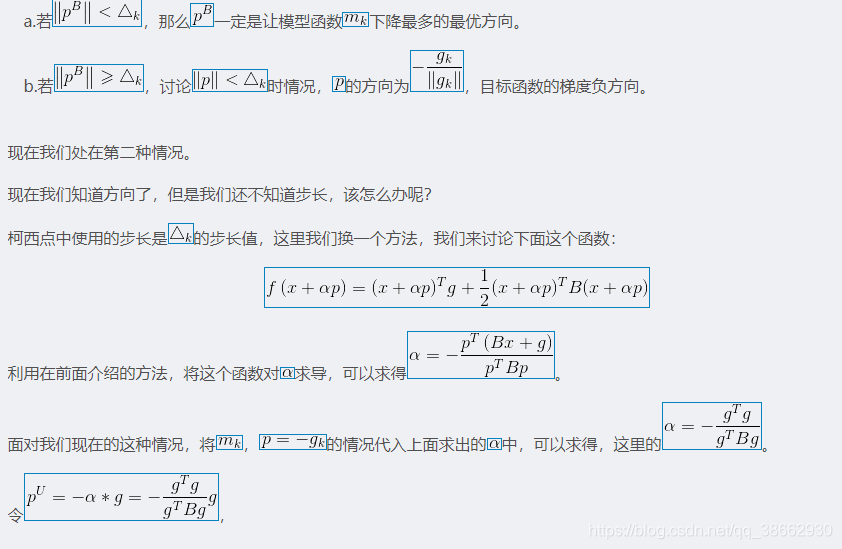
说明:令
f
=
x
g
T
+
1
2
x
T
B
x
f=xg^T+\frac{1}{2}x^TBx
f=xgT+21xTBx 记
g
=
d
f
d
x
=
g
+
B
T
x
g=\frac{df}{dx}=g+B^Tx
g=dxdf=g+BTx,可以计算出
P
U
P^U
PU
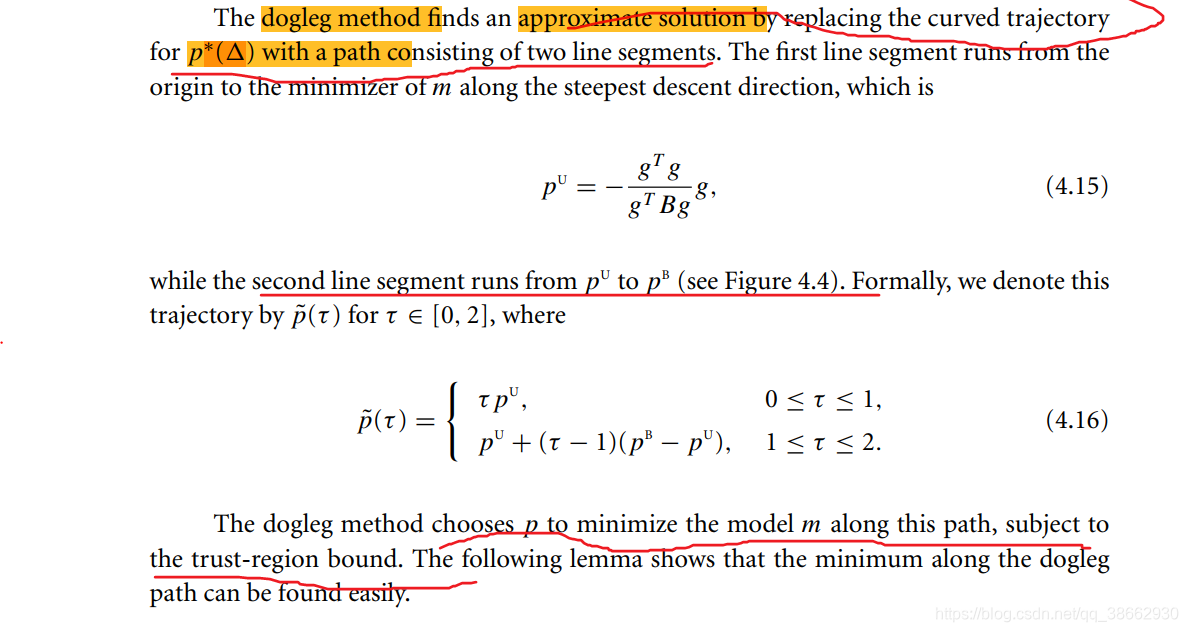
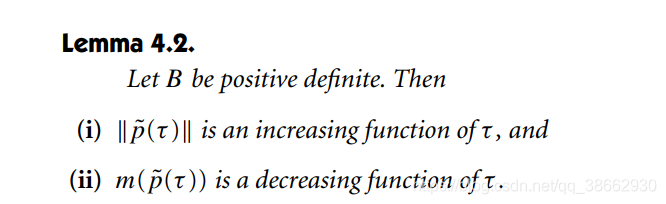
由引理知,当
P
(
τ
)
P(\tau)
P(τ)与信赖域相交时(),则取得最优的
P
(
τ
)
P(\tau)
P(τ)
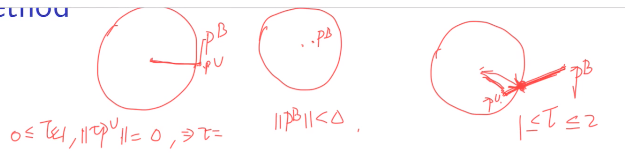
因此以下有三种情况:即PU在外部,PB在内部,PB在外部且PU在内部
部分来源于
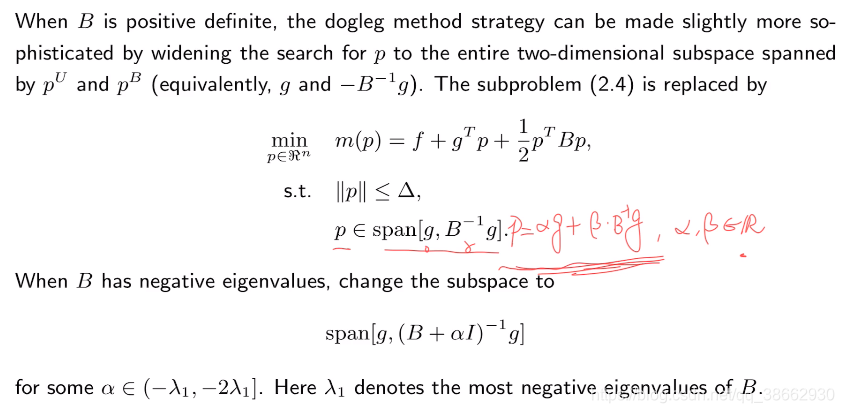
拓展:二维子空间方法:即在
P
U
P^U
PU,
P
B
P^B
PB形成的子空间中,寻找最佳的P,
未知量是关于
β
,
α
\beta,\alpha
β,α,代入目标函数中,求出这两个变量便可以求出最佳的P,由于在空间中搜索,待定的P的选择性增多

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









