







 本文介绍了如何利用Tensorflow2和OpenAI Gym的CARTPOLE-V1环境实现深度Q学习(DQN)算法。通过Q-Learning的理论基础,详细阐述了DQN的神经网络训练过程,以及在解决迷宫问题中的应用。参考了多个来源,包括Q-learning的实际应用和DQN的深入解析。
本文介绍了如何利用Tensorflow2和OpenAI Gym的CARTPOLE-V1环境实现深度Q学习(DQN)算法。通过Q-Learning的理论基础,详细阐述了DQN的神经网络训练过程,以及在解决迷宫问题中的应用。参考了多个来源,包括Q-learning的实际应用和DQN的深入解析。
OpenAI gym
手动编环境是一件很耗时间的事情, 所以如果有能力使用别人已经编好的环境, 可以节约我们很多时间. OpenAI gym 就是这样一个模块, 他提供了我们很多优秀的模拟环境. 我们的各种 强化学习算法都能使用这些环境.
CARTPOLE-V1 环境介绍
CartPole 是gym提供的一个基础的环境,即车杆游戏,游戏里面有一个小车,上有竖着一根杆子,每次重置后的初始状态会有所不同。小车需要左右移动来保持杆子竖直,为了保证游戏继续进行需要满足以下两个条件:
- 杆子倾斜的角度 \thetaθ 不能大于15°
- 小车移动的位置 x 需保持在一定范围(中间到两边各2.4个单位长度)
对于 CartPole-v1 环境,其动作是两个离散的动作左移(0)和右移(1),环境包括小车位置、小车速度、杆子夹角及角变化率四个变量。下面以CartPole-v1 环境为例,来介绍 DQN 的实现。
Q-Learning
在 Q-Learning 算法中,我们把这个长期奖励记为 Q 值,我们会考虑每个 ”状态s-动作a“ 的 Q 值,和动作a的回报R。具体而言,它的计算公式为

不过一般地,我们使用更为保守地更新 Q 表的方法,即引入松弛变量 alpha,按如下的公式进行更新,使得 Q 表的迭代变化更为平缓。

DQN
我们知道,神经网络的训练是一个最优化问题,最优化一个损失函数loss function,也就是标签和网络输出的偏差,目标是让损失函数最小化。为此,我们需要有样本,巨量的有标签数据,然后通过反向传播使用梯度下降的方法来更新神经网络的参数。
用Q-learning产生的数据来训练神经网络。实际Q值与目标Q值之差是神经网络优化的对象。
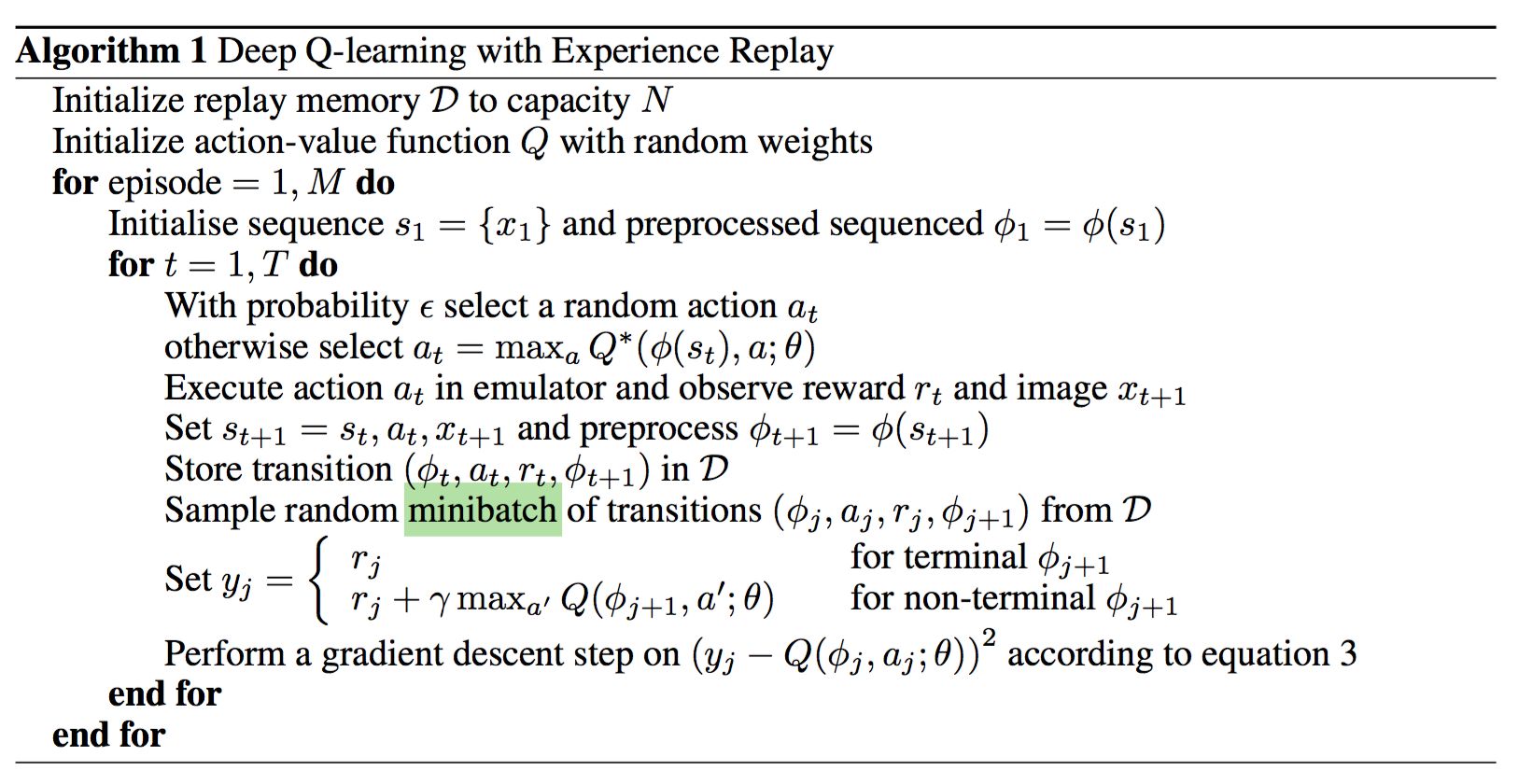
这里的y_j 就是目标Q值。当然了,一开始没有数据,要吧Q-Learning过程中产生的数据的结果存储到一定程度再计算目标Q值,处理好数据送去训练。
总代码如下
import argparse
import os
import random
import numpy as np
import gym
import tensorflow as tf
parser = argparse.ArgumentParser()
parser.add_argument('--train', dest='train', default=True)
parser.add_argument('--test', dest='test', default=True)
parser.add_argument('--gamma', type=float, default=0.95)
parser.add_argument('--lr', type=float, default=0.005)
parser.add_argument('--batch_size', type=int, default=32)
parser.add_argument('--eps', type=float, default=0.1)
parser.add_argument('--train_episodes', type=int, 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









