







 本文解析了GMapping中的关键概念,包括map、base_link、odom和自定义坐标系,介绍了激光雷达数据的处理流程,以及多线程操作中的同步机制。重点在于理解不同坐标系的作用和激光扫描数据在gmapping中的转换过程。
本文解析了GMapping中的关键概念,包括map、base_link、odom和自定义坐标系,介绍了激光雷达数据的处理流程,以及多线程操作中的同步机制。重点在于理解不同坐标系的作用和激光扫描数据在gmapping中的转换过程。
1、gmapping坐标系转换
1.1 map
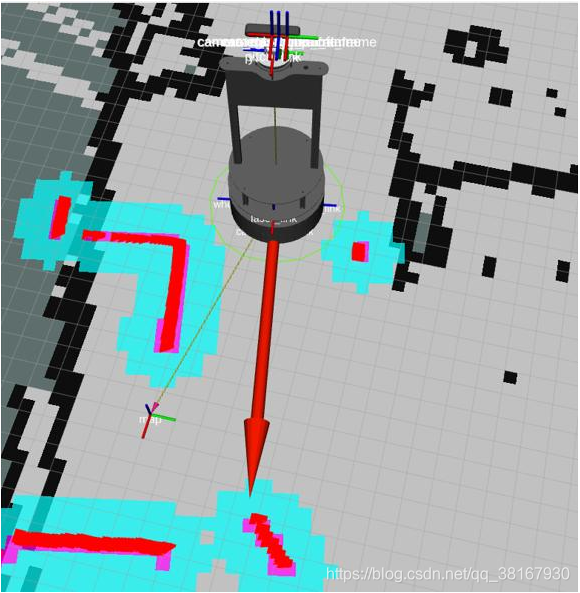
map坐标系是一个世界固定坐标系,其Z轴指向上方。相对于map坐标系的移动平台的姿态,不应该随时间显著移动。map坐标系作为长期的全局参考是很有用的,但是跳变使得对于本地传感和执行器来说,其实是一个不好的参考坐标。使用Gmapping建图时,建图起始点被设为map的原点(如下图)
1.2 base_link
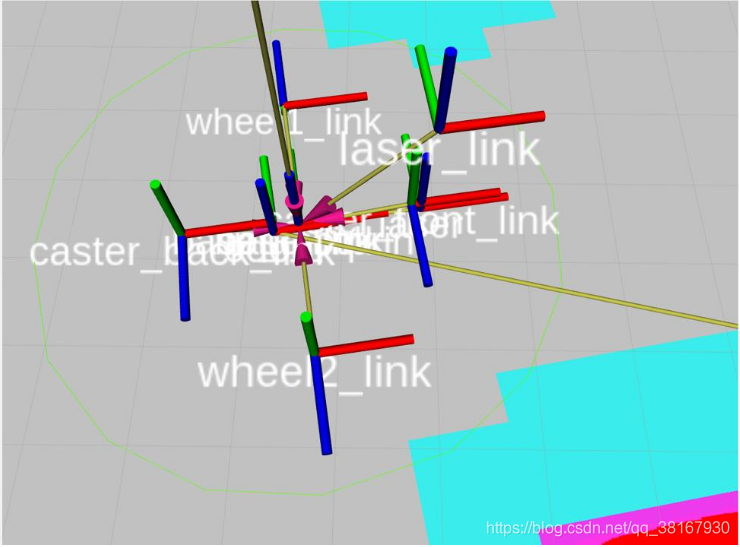
机器人本体坐标系,与机器人中心重合,也有的成为base_footprint。图中中心所有箭头指向的位置是base_link,机器人启动后静止时,base_link的左边是odom,也就是黄线的另一端(图1的map对应的黄线):
1.3 odom
里程计坐标系(odom或者odom_combined),odom 坐标系是一个世界固定坐标系。在odom 坐标系中移动平台的位姿可以任意移动,没有任何界限。这种移动使得odom 坐标系不能作为长期的全局参考。然而,在odom 坐标系中的机器人的姿态能够保证是连续的,这意味着在odom 坐标系中的移动平台的姿态总是平滑变化,没有跳变。在一个典型设置中,odom 坐标系是基于测距源来计算的,如车轮里程计,视觉里程计或惯性测量单元。odom 坐标系作为一种精确,作为短期的本地参考是很有用的,但偏移使得它不能作为长期参考。
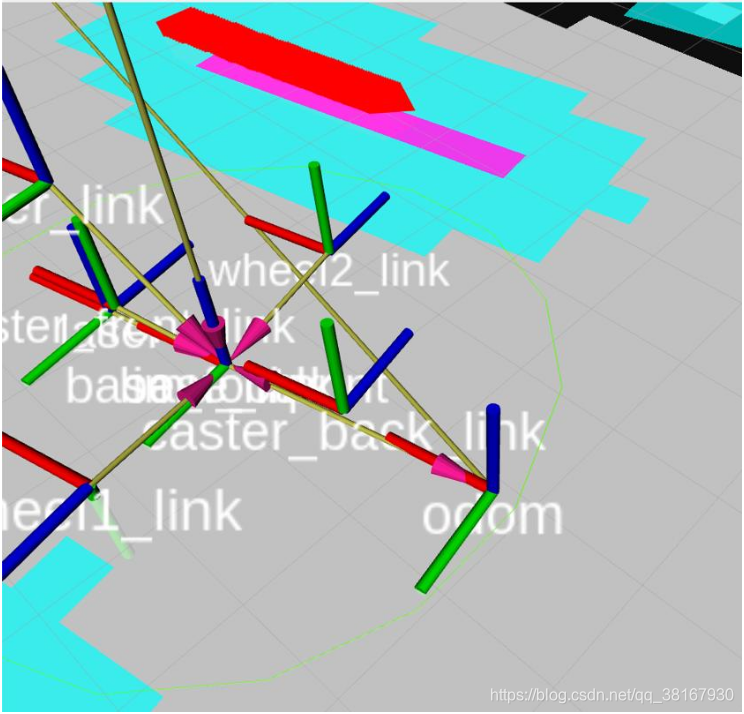
如图,是机器人向前移动了一段距离的坐标系,可以看出odom与base_link之间的距离增大了一些,但是继续向前移动时,他们之间的距离在一定范围变动。因为odom是通过传感器测量,然后经过某些算法的计算得到的系统的估计值。
1.4 自定义(传感器坐标系or其他)
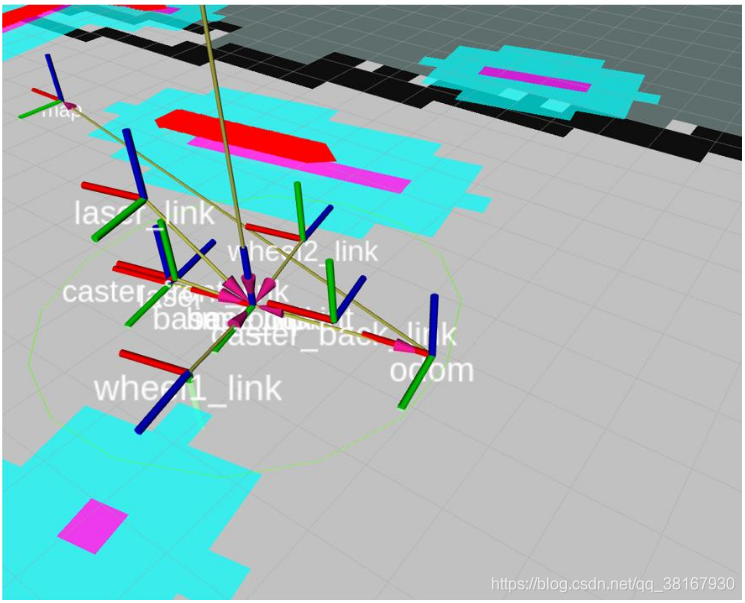
如图,laser_link激光雷达的坐标系,激光雷达的安装点,其与base_link的tf为固定的(安装在底盘上的)。
wheel1_link,wheel2_link左右轮坐标系,同上:
当机器人获得地图上的一个点(坐标系map)作为目标导航点,然后转换到odom坐标系下,传感器测量值读取转换到base_link(安装在机体上的器件与base_link存在固定的转换关系),base_link转换到odom。
2、gmapping基本数据结构
2.1 Sensor_range
在rangereading.h中,激光传感器数据类在rangereading.h中,这里重写了这个类,主要是在调用my_slam_gmapping.cpp/MySlamGMapping::addScan(const sensor_msgs::LaserScan& scan, GMapping::OrientedPoint& gmp_pose),将每一帧激光数据,通过addScan函数封装成gmapping算法需要的数据格式。
代码如下:
#include <vector>
#include "../utils/point.h"
namespace GMapping
{
// 激光传感器数据类
class RangeReading
{
public:
// 均匀角度的激光雷达数据
// RangeReading(unsigned int n_beams, const double* d);
// 不均匀角度的激光雷达数据
RangeReading(unsigned int n_beams, const double* d, const double* angle);
virtual ~RangeReading();
// 得到这帧激光数据的激光雷达位姿
inline const OrientedPoint& getPose() const
{
return m_pose;
}
// 设置这帧传感器数据的位姿
inline void setPose(const OrientedPoint& pose)
{
m_pose = pose;
}
// 返回激光束的多少
inline const unsigned int getSize() const
{
return m_beams;
}
// 存储激光雷达的距离信息
std::vector<double> m_dists;
unsigned int m_beams;
// 每个激光束对应的角度
std::vector<double> m_angles;
protected:
// 这帧激光数据的位姿
OrientedPoint m_pose;
};
}rangereading.cpp代码如下,主要是一个构造函数,其中n_beams指定了激光束的数量:
// 不均匀角度的激光雷达数据
RangeReading::RangeReading(unsigned int n_beams, const double* d, const double* angle)
{
m_beams = n_beams;
m_dists.resize(n_beams);
m_angles.resize(n_beams);
for (unsigned int i=0; i<n_beams; i ++)
{
m_dists[i] = d[i];
m_angles[i] = angle[i];
}
}
3、gmapping多线程操作
首选包含头文件:
#include <boost/thread.hpp>比如my_slam_gmapping.cpp文件中的StartLiveSlam注册回调函数后,新启动了发布map到odom转换关系的线程:
/* 发布map到odom的转换关系的线程 */
transform_thread_ = new boost::thread(boost::bind(&MySlamGMapping::publishLoop, this, transform_publish_period_));laserCallback函数中的:
// 多个线程访问同一资源时,为了保证数据的一致性,最简单的方式就是使用 mutex(互斥锁)
// 阻止了同一时刻有多个线程并发访问共享资源
map_to_odom_mutex_.lock();
map_to_odom_ = map_to_lidar * (odom_to_lidar.inverse()); // 表述里程计坐标系和map坐标系的差距
map_to_odom_mutex_.unlock();在后面的发布map和odom的转换关系,也就是StartLiveSlam调用的第三个函数中,密集使用map和odom的转换关系:
// StartLiveSlam函数调用的第③个函数:发布map->odom的转换关系
void MySlamGMapping::publishLoop(double transform_publish_period)
{
if(transform_publish_period == 0)
return;
ros::Rate r(1.0 / transform_publish_period);
while(ros::ok())
{
publishTransform();
r.sleep();
}
}
// 发布map到odom的转换关系
void MySlamGMapping::publishTransform()
{
map_to_odom_mutex_.lock();
// 默认情况下 tf_delay_ = transform_publish_period_;
// 默认情况下ros::Duration(tf_delay_)时间长度,等于 r.sleep();的时间长度
ros::Time tf_expiration = ros::Time::now() + ros::Duration(tf_delay_); // 这个没搞明白为啥要加这一点时间,感觉没有必要
tfB_->sendTransform( tf::StampedTransform (map_to_odom_, tf_expiration, map_frame_, odom_frame_));
map_to_odom_mutex_.unlock();
}


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











