







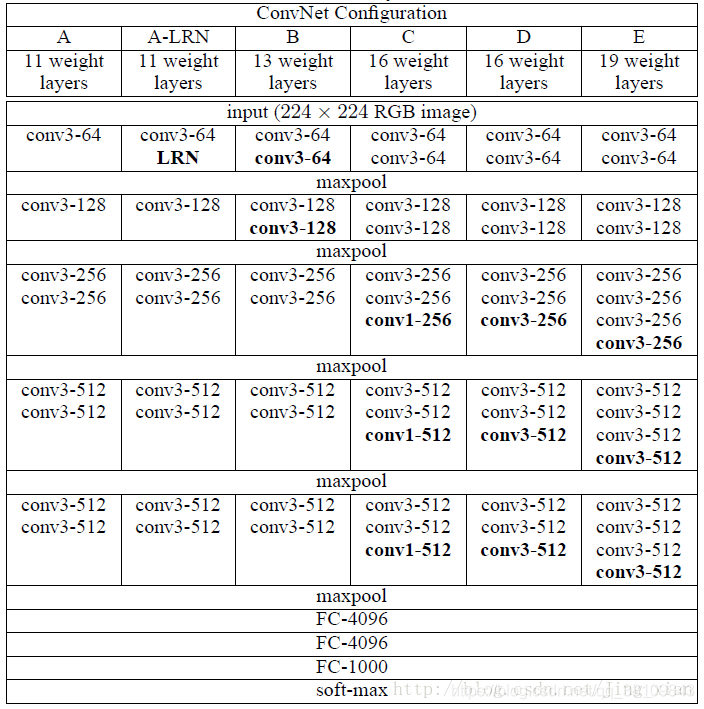
VGG
串联结构:
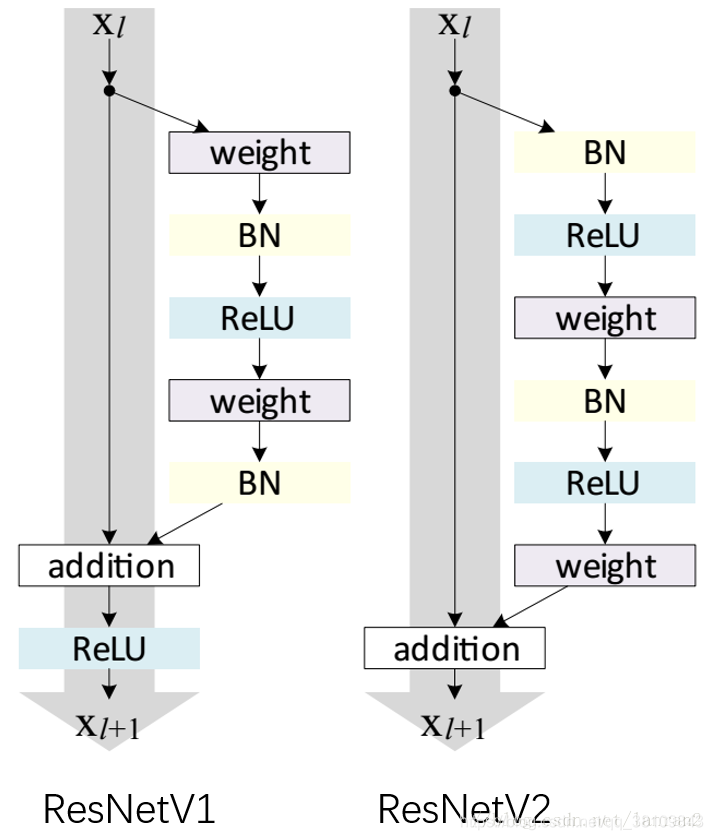
Resnet
跳变连接:
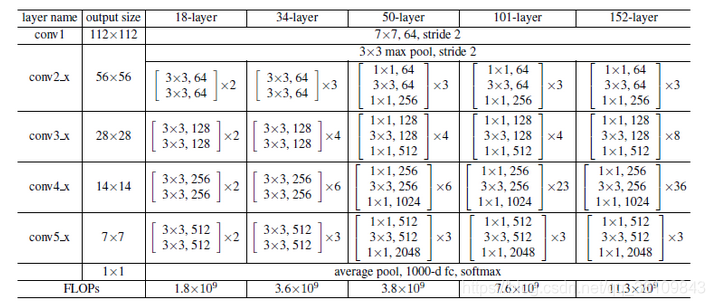
resnet50结构图:https://blog.youkuaiyun.com/qq_21046135/article/details/81674605
import torch
import torch.nn as nn
import torch.nn.functional as F
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, in_planes, planes, stride=1):
super(BasicBlock, self).__init__()
self.conv1 = nn.Conv2d(in_planes, planes, kernel_size=3, stride=stride, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=1, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.shortcut = nn.Sequential()
if stride != 1 or in_planes != self.expansion*planes:
self.shortcut = nn.Sequential(
nn.Conv2d(in_planes, self.expansion*planes, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(self.expansion*planes)
)
def forward(self, x):
out = F.relu(self.bn1(self.conv1(x)))
out = self.bn2(self.conv2(out))
out += self.shortcut(x)
out = F.relu(out)
return out
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, in_planes, planes, stride=1):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(in_planes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, self.expansion*planes, kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(self.expansion*planes)
self.shortcut = nn.Sequential()
if stride != 1 or in_planes != self.expansion*planes:
self.shortcut = nn.Sequential(
nn.Conv2d(in_planes, self.expansion*planes, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(self.expansion*planes)
)
def forward(self, x):
out = F.relu(self.bn1(self.conv1(x)))
out = F.relu(self.bn2(self.conv2(out)))
out = self.bn3(self.conv3(out))
out += self.shortcut(x)
out = F.relu(out)
return out
class ResNet(nn.Module):
def __init__(self, block, num_blocks, num_classes=10):
super(ResNet, self).__init__()
self.in_planes = 64
self.conv1 = nn.Conv2d(3, 64, kernel_size=3, stride=1, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.layer1 = self._make_layer(block, 64, num_blocks[0], stride=1)
self.layer2 = self._make_layer(block, 128, num_blocks[1], stride=2)
self.layer3 = self._make_layer(block, 256, num_blocks[2], stride=2)
self.layer4 = self._make_layer(block, 512, num_blocks[3], stride=2)
self.linear = nn.Linear(512*block.expansion, num_classes)
def _make_layer(self, block, planes, num_blocks, stride):
strides = [stride] + [1]*(num_blocks-1)
print(strides)
layers = []
for stride in strides:
layers.append(block(self.in_planes, planes, stride))
self.in_planes = planes * block.expansion
return nn.Sequential(*layers)
def forward(self, x):
out = F.relu(self.bn1(self.conv1(x)))
out = self.layer1(out)
out = self.layer2(out)
out = self.layer3(out)
out = self.layer4(out)
out = F.avg_pool2d(out, 4)
out = out.view(out.size(0), -1)
out = self.linear(out)
return out
def ResNet18():
return ResNet(BasicBlock, [2,2,2,2])
def ResNet34():
return ResNet(BasicBlock, [3,4,6,3])
def ResNet50():
return ResNet(Bottleneck, [3,4,6,3])
def ResNet101():
return ResNet(Bottleneck, [3,4,23,3])
def ResNet152():
return ResNet(Bottleneck, [3,8,36,3])
def test():
net = ResNet34()
print(net)
#y = net(torch.randn(1,3,32,32))
#print(y.size())
test()
ResNet(
(conv1): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(layer1): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
(1): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
(2): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
)
(layer2): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential(
(0): Conv2d(64, 128, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
(2): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
(3): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
)
(layer3): Sequential(
(0): BasicBlock(
(conv1): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential(
(0): Conv2d(128, 256, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
(2): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
(3): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
(4): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
(5): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
)
(layer4): Sequential(
(0): BasicBlock(
(conv1): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
(2): BasicBlock(
(conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
)
(linear): Linear(in_features=512, out_features=10, bias=True)
)
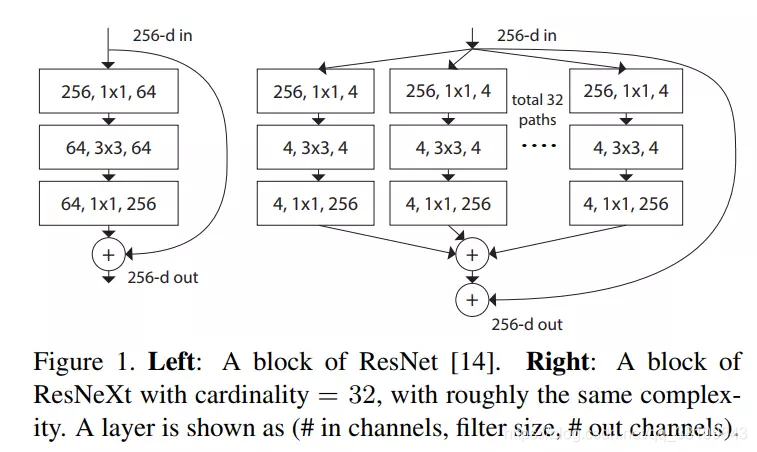
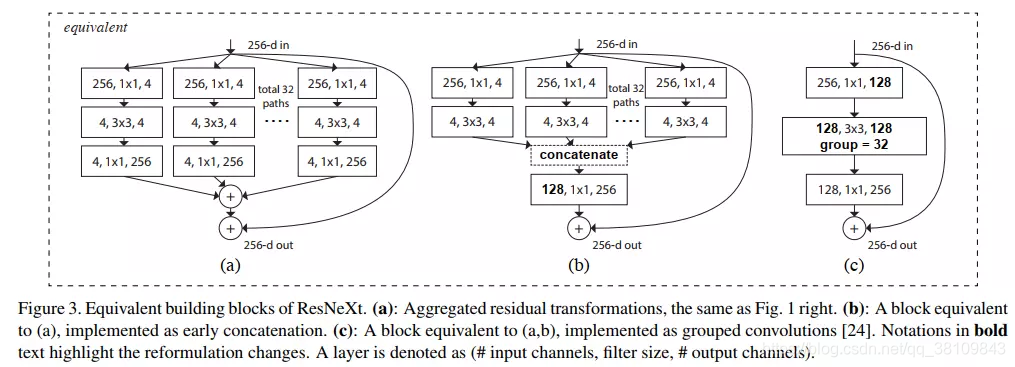
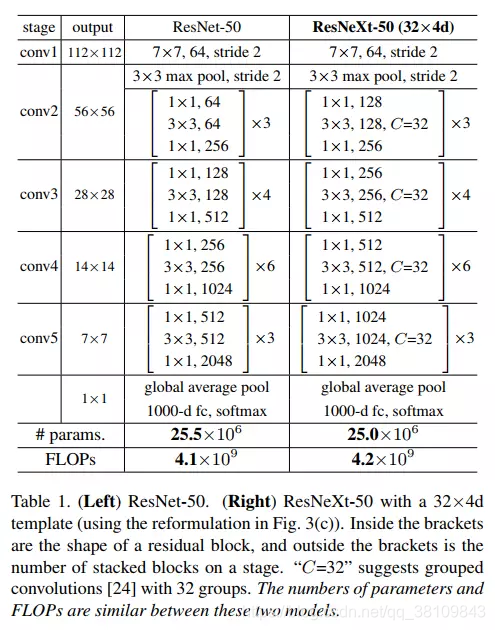
Resnext
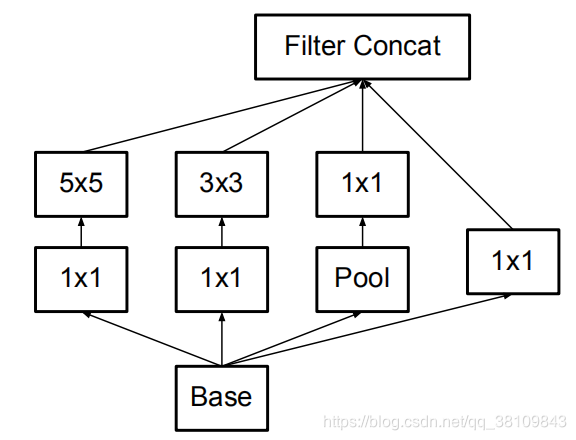
inception
V1:
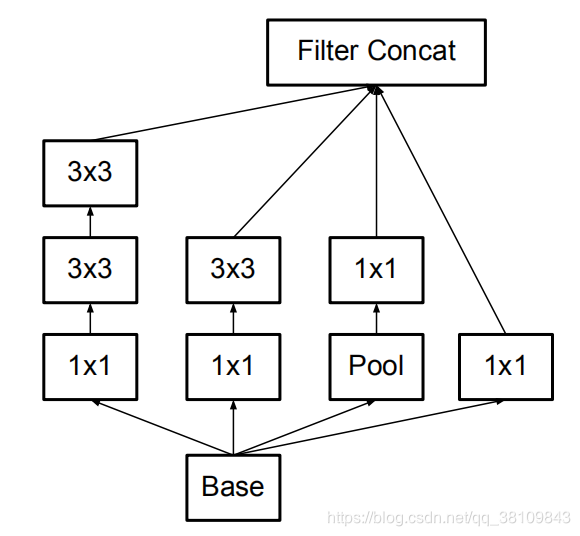
V2:
V3:

inceptionV3完整结构: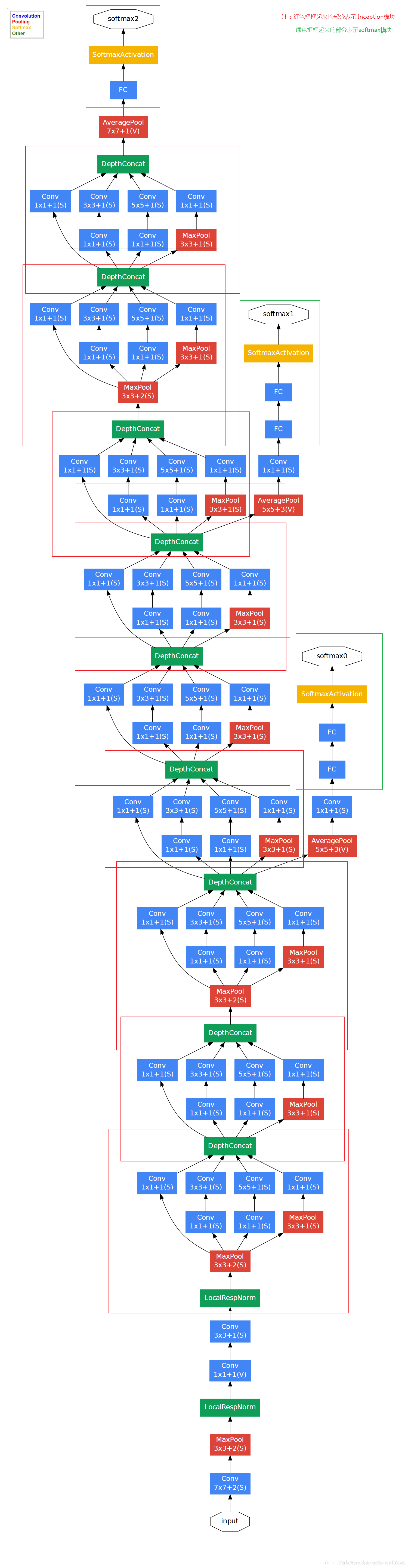
这篇写的也不错:https://www.jianshu.com/p/3bbf0675cfce
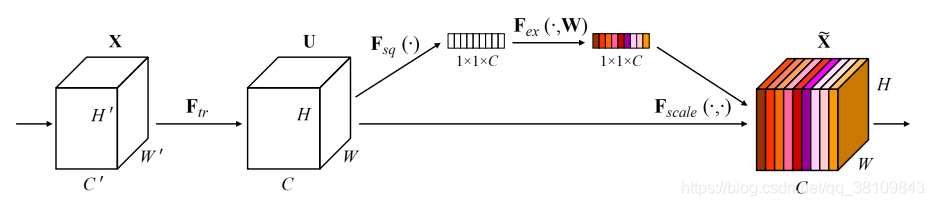
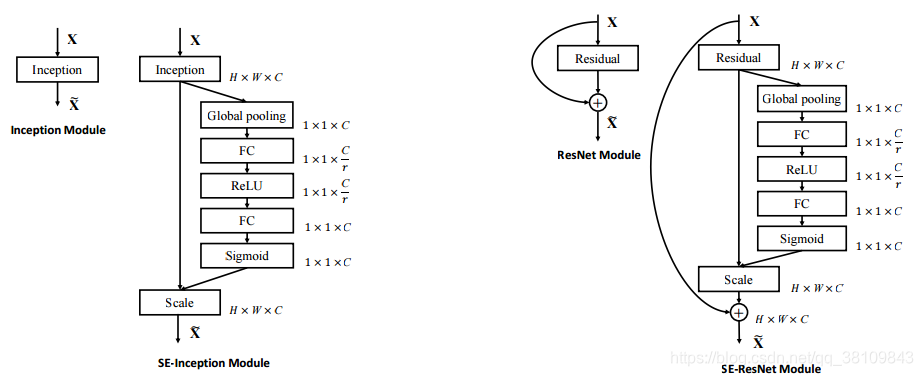
SENet
这篇介绍挺不错的:https://zhuanlan.zhihu.com/p/65459972
在inception和resnet上的应用
代码实现:
class SELayer(nn.Module):
def __init__(self, channel, reduction=16):
super(SELayer, self).__init__()
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.fc = nn.Sequential(
nn.Linear(channel, channel // reduction, bias=False),
nn.ReLU(inplace=True),
nn.Linear(channel // reduction, channel, bias=False),
nn.Sigmoid()
)
def forward(self, x):
b, c, _, _ = x.size()
y = self.avg_pool(x).view(b, c)
y = self.fc(y).view(b, c, 1, 1)
return x * y.expand_as(x)
class SEBottleneck(nn.Module):
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None, reduction=16):
super(SEBottleneck, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride,
padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, planes * 4, kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(planes * 4)
self.relu = nn.ReLU(inplace=True)
self.se = SELayer(planes * 4, reduction)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
out = self.se(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
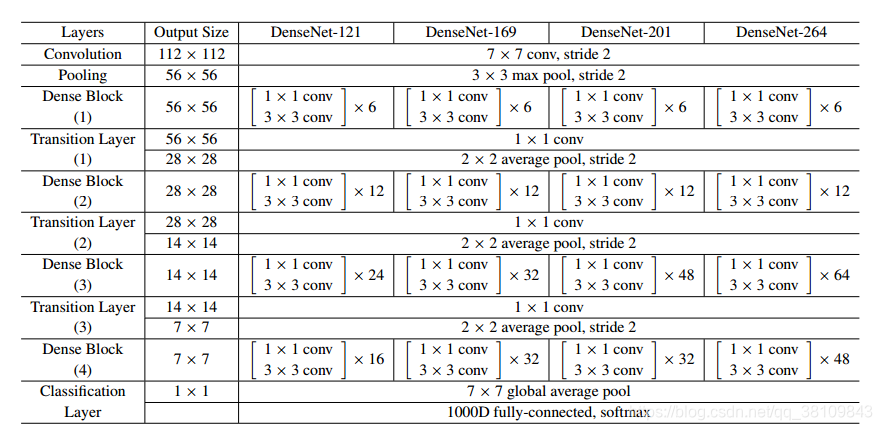
densenet
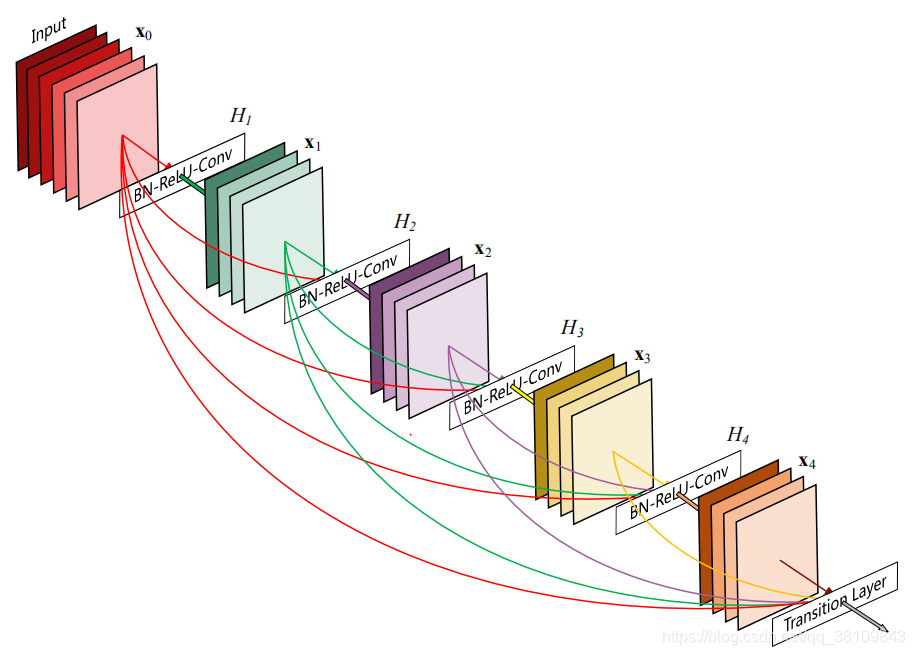

pytorch实现
import torch
import torch.nn as nn
import torch.nn.functional as F
from collections import OrderedDict
class _DenseLayer(nn.Sequential):
def __init__(self, num_input_features, growth_rate, bn_size, drop_rate):
super(_DenseLayer, self).__init__()
self.add_module('norm1', nn.BatchNorm2d(num_input_features)),
self.add_module('relu1', nn.ReLU(inplace=True)),
self.add_module('conv1', nn.Conv2d(num_input_features, bn_size *
growth_rate, kernel_size=1, stride=1, bias=False)),
self.add_module('norm2', nn.BatchNorm2d(bn_size * growth_rate)),
self.add_module('relu2', nn.ReLU(inplace=True)),
self.add_module('conv2', nn.Conv2d(bn_size * growth_rate, growth_rate,
kernel_size=3, stride=1, padding=1, bias=False)),
self.drop_rate = drop_rate
def forward(self, x):
new_features = super(_DenseLayer, self).forward(x)
if self.drop_rate > 0:
new_features = F.dropout(new_features, p=self.drop_rate, training=self.training)
return torch.cat([x, new_features], 1)
class _DenseBlock(nn.Sequential):
def __init__(self, num_layers, num_input_features, bn_size, growth_rate, drop_rate):
super(_DenseBlock, self).__init__()
for i in range(num_layers):
layer = _DenseLayer(num_input_features + i * growth_rate, growth_rate, bn_size, drop_rate)
self.add_module('denselayer%d' % (i + 1), layer)
class _Transition(nn.Sequential):
def __init__(self, num_input_features, num_output_features):
super(_Transition, self).__init__()
self.add_module('norm', nn.BatchNorm2d(num_input_features))
self.add_module('relu', nn.ReLU(inplace=True))
self.add_module('conv', nn.Conv2d(num_input_features, num_output_features,
kernel_size=1, stride=1, bias=False))
self.add_module('pool', nn.AvgPool2d(kernel_size=2, stride=2))
class DenseNet(nn.Module):
def __init__(self, growth_rate=32, block_config=(6, 12, 24, 16),
num_init_features=64, bn_size=4, drop_rate=0, num_classes=1000):
super(DenseNet, self).__init__()
# First convolution
self.features = nn.Sequential(OrderedDict([
('conv0', nn.Conv2d(3, num_init_features, kernel_size=7, stride=2, padding=3, bias=False)),
('norm0', nn.BatchNorm2d(num_init_features)),
('relu0', nn.ReLU(inplace=True)),
('pool0', nn.MaxPool2d(kernel_size=3, stride=2, padding=1)),
]))
# Each denseblock
num_features = num_init_features
for i, num_layers in enumerate(block_config):
block = _DenseBlock(num_layers=num_layers, num_input_features=num_features,
bn_size=bn_size, growth_rate=growth_rate, drop_rate=drop_rate)
self.features.add_module('denseblock%d' % (i + 1), block)
num_features = num_features + num_layers * growth_rate
if i != len(block_config) - 1:
trans = _Transition(num_input_features=num_features, num_output_features=num_features // 2)
self.features.add_module('transition%d' % (i + 1), trans)
num_features = num_features // 2
# Final batch norm
self.features.add_module('norm5', nn.BatchNorm2d(num_features))
# Linear layer
self.classifier = nn.Linear(num_features, num_classes)
# Official init from torch repo.
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal(m.weight.data)
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
elif isinstance(m, nn.Linear):
m.bias.data.zero_()
def forward(self, x):
features = self.features(x)
out = F.relu(features, inplace=True)
out = F.avg_pool2d(out, kernel_size=7, stride=1).view(features.size(0), -1)
out = self.classifier(out)
return out
def densenet121(**kwargs):
model = DenseNet(num_init_features=64, growth_rate=32, block_config=(6, 12, 24, 16), **kwargs)
return model
def densenet169(**kwargs):
model = DenseNet(num_init_features=64, growth_rate=32, block_config=(6, 12, 32, 32), **kwargs)
return model
def densenet201(**kwargs):
model = DenseNet(num_init_features=64, growth_rate=32, block_config=(6, 12, 48, 32), **kwargs)
return model
def densenet161(**kwargs):
model = DenseNet(num_init_features=96, growth_rate=48, block_config=(6, 12, 36, 24), **kwargs)
return model
if __name__ == '__main__':
# 'DenseNet', 'densenet121', 'densenet169', 'densenet201', 'densenet161'
# Example
net = DenseNet()
print(net)
DenseNet(
(features): Sequential(
(conv0): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(norm0): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu0): ReLU(inplace=True)
(pool0): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(denseblock1): _DenseBlock(
(denselayer1): _DenseLayer(
(norm1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(64, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer2): _DenseLayer(
(norm1): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(96, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer3): _DenseLayer(
(norm1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(128, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer4): _DenseLayer(
(norm1): BatchNorm2d(160, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(160, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer5): _DenseLayer(
(norm1): BatchNorm2d(192, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(192, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer6): _DenseLayer(
(norm1): BatchNorm2d(224, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(224, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
)
(transition1): _Transition(
(norm): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(pool): AvgPool2d(kernel_size=2, stride=2, padding=0)
)
(denseblock2): _DenseBlock(
(denselayer1): _DenseLayer(
(norm1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(128, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer2): _DenseLayer(
(norm1): BatchNorm2d(160, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(160, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer3): _DenseLayer(
(norm1): BatchNorm2d(192, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(192, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer4): _DenseLayer(
(norm1): BatchNorm2d(224, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(224, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer5): _DenseLayer(
(norm1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer6): _DenseLayer(
(norm1): BatchNorm2d(288, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(288, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer7): _DenseLayer(
(norm1): BatchNorm2d(320, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(320, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer8): _DenseLayer(
(norm1): BatchNorm2d(352, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(352, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer9): _DenseLayer(
(norm1): BatchNorm2d(384, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(384, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer10): _DenseLayer(
(norm1): BatchNorm2d(416, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(416, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer11): _DenseLayer(
(norm1): BatchNorm2d(448, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(448, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer12): _DenseLayer(
(norm1): BatchNorm2d(480, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(480, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
)
(transition2): _Transition(
(norm): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(pool): AvgPool2d(kernel_size=2, stride=2, padding=0)
)
(denseblock3): _DenseBlock(
(denselayer1): _DenseLayer(
(norm1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer2): _DenseLayer(
(norm1): BatchNorm2d(288, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(288, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer3): _DenseLayer(
(norm1): BatchNorm2d(320, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(320, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer4): _DenseLayer(
(norm1): BatchNorm2d(352, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(352, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer5): _DenseLayer(
(norm1): BatchNorm2d(384, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(384, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer6): _DenseLayer(
(norm1): BatchNorm2d(416, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(416, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer7): _DenseLayer(
(norm1): BatchNorm2d(448, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(448, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer8): _DenseLayer(
(norm1): BatchNorm2d(480, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(480, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer9): _DenseLayer(
(norm1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer10): _DenseLayer(
(norm1): BatchNorm2d(544, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(544, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer11): _DenseLayer(
(norm1): BatchNorm2d(576, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(576, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer12): _DenseLayer(
(norm1): BatchNorm2d(608, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(608, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer13): _DenseLayer(
(norm1): BatchNorm2d(640, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(640, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer14): _DenseLayer(
(norm1): BatchNorm2d(672, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(672, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer15): _DenseLayer(
(norm1): BatchNorm2d(704, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(704, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer16): _DenseLayer(
(norm1): BatchNorm2d(736, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(736, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer17): _DenseLayer(
(norm1): BatchNorm2d(768, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(768, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer18): _DenseLayer(
(norm1): BatchNorm2d(800, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(800, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer19): _DenseLayer(
(norm1): BatchNorm2d(832, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(832, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer20): _DenseLayer(
(norm1): BatchNorm2d(864, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(864, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer21): _DenseLayer(
(norm1): BatchNorm2d(896, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(896, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer22): _DenseLayer(
(norm1): BatchNorm2d(928, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(928, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer23): _DenseLayer(
(norm1): BatchNorm2d(960, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(960, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer24): _DenseLayer(
(norm1): BatchNorm2d(992, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(992, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
)
(transition3): _Transition(
(norm): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv): Conv2d(1024, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(pool): AvgPool2d(kernel_size=2, stride=2, padding=0)
)
(denseblock4): _DenseBlock(
(denselayer1): _DenseLayer(
(norm1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer2): _DenseLayer(
(norm1): BatchNorm2d(544, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(544, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer3): _DenseLayer(
(norm1): BatchNorm2d(576, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(576, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer4): _DenseLayer(
(norm1): BatchNorm2d(608, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(608, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer5): _DenseLayer(
(norm1): BatchNorm2d(640, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(640, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer6): _DenseLayer(
(norm1): BatchNorm2d(672, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(672, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer7): _DenseLayer(
(norm1): BatchNorm2d(704, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(704, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer8): _DenseLayer(
(norm1): BatchNorm2d(736, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(736, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer9): _DenseLayer(
(norm1): BatchNorm2d(768, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(768, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer10): _DenseLayer(
(norm1): BatchNorm2d(800, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(800, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer11): _DenseLayer(
(norm1): BatchNorm2d(832, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(832, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer12): _DenseLayer(
(norm1): BatchNorm2d(864, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(864, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer13): _DenseLayer(
(norm1): BatchNorm2d(896, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(896, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer14): _DenseLayer(
(norm1): BatchNorm2d(928, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(928, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer15): _DenseLayer(
(norm1): BatchNorm2d(960, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(960, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(denselayer16): _DenseLayer(
(norm1): BatchNorm2d(992, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(conv1): Conv2d(992, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(norm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
)
(norm5): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(classifier): Linear(in_features=1024, out_features=1000, bias=True)
)
Residual-in-Residual Dense Block (RRDB)


SqueezeNet
https://zhuanlan.zhihu.com/p/31558773
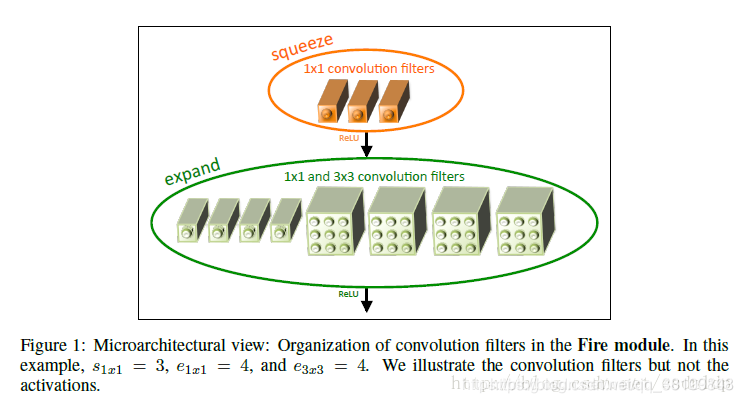
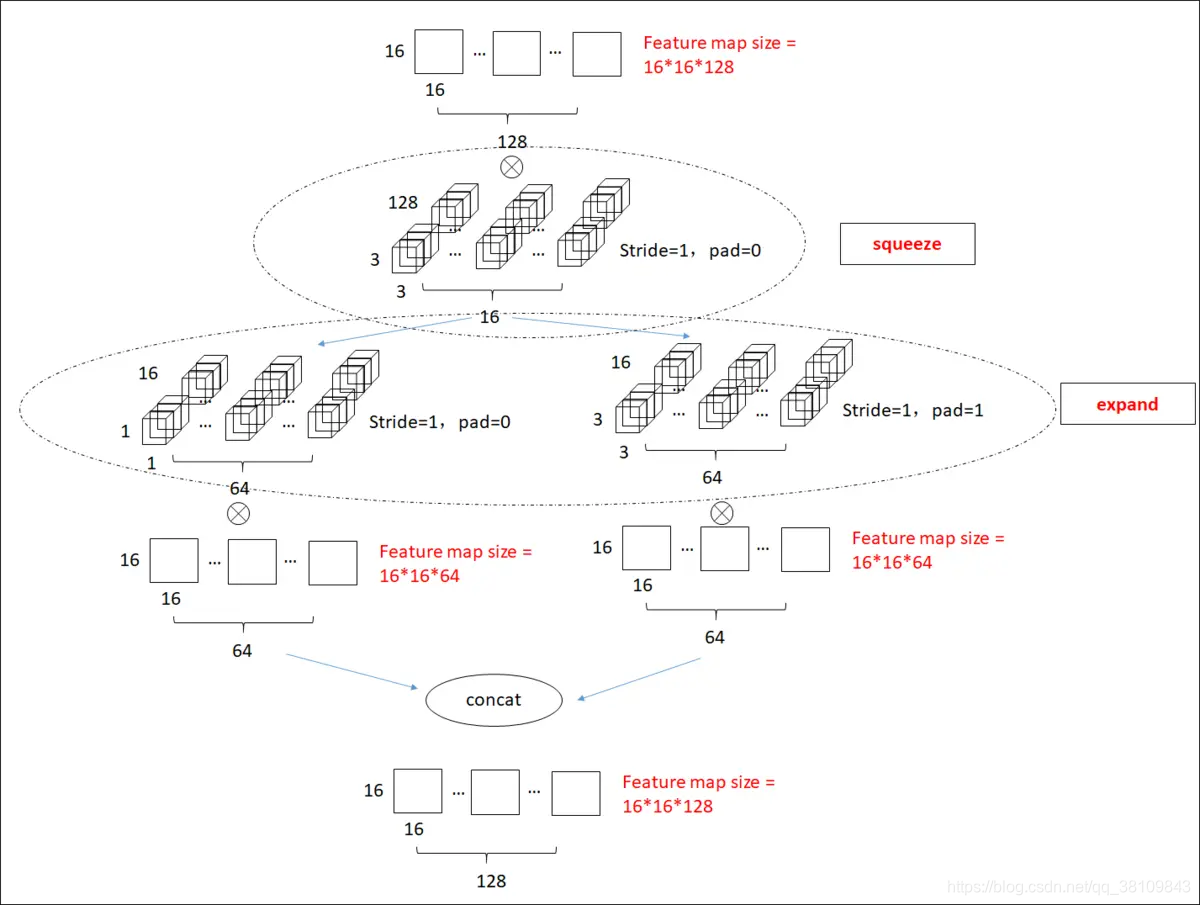
Fire Module
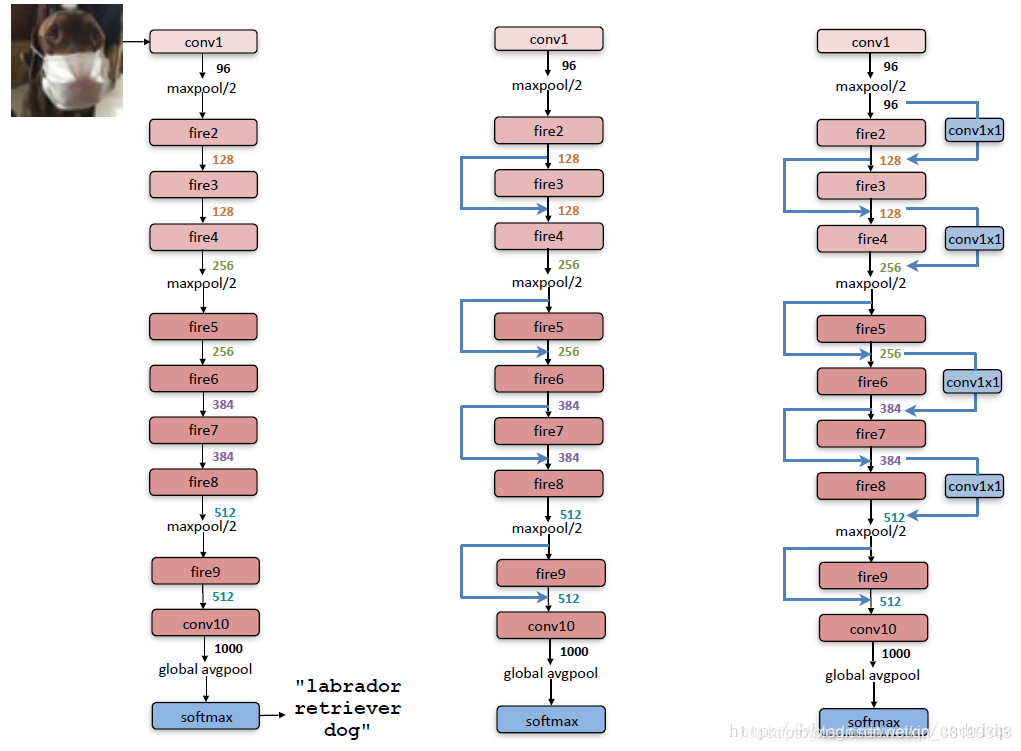
总体结构
pytorch实现:
import torch
import torch.nn as nn
import torch.nn.functional as F
class Fire(nn.Module):
def __init__(self, inplanes, squeeze_planes,
expand1x1_planes, expand3x3_planes):
super(Fire, self).__init__()
self.inplanes = inplanes
self.squeeze = nn.Conv2d(inplanes, squeeze_planes, kernel_size=1)#定义压缩层,1X1卷积
self.squeeze_activation = nn.ReLU(inplace=True)
self.expand1x1 = nn.Conv2d(squeeze_planes, expand1x1_planes,#定义扩展层,1X1卷积
kernel_size=1)
self.expand1x1_activation = nn.ReLU(inplace=True)
self.expand3x3 = nn.Conv2d(squeeze_planes, expand3x3_planes,#定义扩展层,3X3卷积
kernel_size=3, padding=1)
self.expand3x3_activation = nn.ReLU(inplace=True)
def forward(self, x):
x = self.squeeze_activation(self.squeeze(x))
return torch.cat([
self.expand1x1_activation(self.expand1x1(x)),
self.expand3x3_activation(self.expand3x3(x))
], 1)
class SqueezeNet(nn.Module):
def __init__(self, version=1.0, num_classes=1000):
super(SqueezeNet, self).__init__()
if version not in [1.0, 1.1]:
raise ValueError("Unsupported SqueezeNet version {version}:"
"1.0 or 1.1 expected".format(version=version))
self.num_classes = num_classes
if version == 1.0:
self.features = nn.Sequential(
nn.Conv2d(3, 96, kernel_size=7, stride=2),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2, ceil_mode=True),
Fire(96, 16, 64, 64),
Fire(128, 16, 64, 64),
Fire(128, 32, 128, 128),
nn.MaxPool2d(kernel_size=3, stride=2, ceil_mode=True),
Fire(256, 32, 128, 128),
Fire(256, 48, 192, 192),
Fire(384, 48, 192, 192),
Fire(384, 64, 256, 256),
nn.MaxPool2d(kernel_size=3, stride=2, ceil_mode=True),
Fire(512, 64, 256, 256),
)
else:
self.features = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=3, stride=2),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2, ceil_mode=True),
Fire(64, 16, 64, 64),
Fire(128, 16, 64, 64),
nn.MaxPool2d(kernel_size=3, stride=2, ceil_mode=True),
Fire(128, 32, 128, 128),
Fire(256, 32, 128, 128),
nn.MaxPool2d(kernel_size=3, stride=2, ceil_mode=True),
Fire(256, 48, 192, 192),
Fire(384, 48, 192, 192),
Fire(384, 64, 256, 256),
Fire(512, 64, 256, 256),
)
# Final convolution is initialized differently form the rest
final_conv = nn.Conv2d(512, self.num_classes, kernel_size=1)
self.classifier = nn.Sequential(
nn.Dropout(p=0.5),
final_conv,
nn.ReLU(inplace=True),
nn.AvgPool2d(13, stride=1)
)
for m in self.modules():
if isinstance(m, nn.Conv2d):
if m is final_conv:
torch.nn.init.normal_(m.weight, mean=0.0, std=0.01)
else:
torch.nn.init.kaiming_uniform_(m.weight)
if m.bias is not None:
torch.nn.init.constant_(m.bias, 0)
def forward(self, x):
x = self.features(x)
x = self.classifier(x)
return x.view(x.size(0), self.num_classes)
def squeezenet1_0(pretrained=False, **kwargs):
r"""SqueezeNet model architecture from the `"SqueezeNet: AlexNet-level
accuracy with 50x fewer parameters and <0.5MB model size"
<https://arxiv.org/abs/1602.07360>`_ paper.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = SqueezeNet(version=1.0, **kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['squeezenet1_0']))
return model
def squeezenet1_1(pretrained=False, **kwargs):
r"""SqueezeNet 1.1 model from the `official SqueezeNet repo
<https://github.com/DeepScale/SqueezeNet/tree/master/SqueezeNet_v1.1>`_.
SqueezeNet 1.1 has 2.4x less computation and slightly fewer parameters
than SqueezeNet 1.0, without sacrificing accuracy.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = SqueezeNet(version=1.1, **kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['squeezenet1_1']))
return model
def test():
net = squeezenet1_0()
print(net)
#y = net(torch.randn(1,3,32,32))
#print(y.size())
test()
SqueezeNet(
(features): Sequential(
(0): Conv2d(3, 96, kernel_size=(7, 7), stride=(2, 2))
(1): ReLU(inplace=True)
(2): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=True)
(3): Fire(
(squeeze): Conv2d(96, 16, kernel_size=(1, 1), stride=(1, 1))
(squeeze_activation): ReLU(inplace=True)
(expand1x1): Conv2d(16, 64, kernel_size=(1, 1), stride=(1, 1))
(expand1x1_activation): ReLU(inplace=True)
(expand3x3): Conv2d(16, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(expand3x3_activation): ReLU(inplace=True)
)
(4): Fire(
(squeeze): Conv2d(128, 16, kernel_size=(1, 1), stride=(1, 1))
(squeeze_activation): ReLU(inplace=True)
(expand1x1): Conv2d(16, 64, kernel_size=(1, 1), stride=(1, 1))
(expand1x1_activation): ReLU(inplace=True)
(expand3x3): Conv2d(16, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(expand3x3_activation): ReLU(inplace=True)
)
(5): Fire(
(squeeze): Conv2d(128, 32, kernel_size=(1, 1), stride=(1, 1))
(squeeze_activation): ReLU(inplace=True)
(expand1x1): Conv2d(32, 128, kernel_size=(1, 1), stride=(1, 1))
(expand1x1_activation): ReLU(inplace=True)
(expand3x3): Conv2d(32, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(expand3x3_activation): ReLU(inplace=True)
)
(6): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=True)
(7): Fire(
(squeeze): Conv2d(256, 32, kernel_size=(1, 1), stride=(1, 1))
(squeeze_activation): ReLU(inplace=True)
(expand1x1): Conv2d(32, 128, kernel_size=(1, 1), stride=(1, 1))
(expand1x1_activation): ReLU(inplace=True)
(expand3x3): Conv2d(32, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(expand3x3_activation): ReLU(inplace=True)
)
(8): Fire(
(squeeze): Conv2d(256, 48, kernel_size=(1, 1), stride=(1, 1))
(squeeze_activation): ReLU(inplace=True)
(expand1x1): Conv2d(48, 192, kernel_size=(1, 1), stride=(1, 1))
(expand1x1_activation): ReLU(inplace=True)
(expand3x3): Conv2d(48, 192, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(expand3x3_activation): ReLU(inplace=True)
)
(9): Fire(
(squeeze): Conv2d(384, 48, kernel_size=(1, 1), stride=(1, 1))
(squeeze_activation): ReLU(inplace=True)
(expand1x1): Conv2d(48, 192, kernel_size=(1, 1), stride=(1, 1))
(expand1x1_activation): ReLU(inplace=True)
(expand3x3): Conv2d(48, 192, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(expand3x3_activation): ReLU(inplace=True)
)
(10): Fire(
(squeeze): Conv2d(384, 64, kernel_size=(1, 1), stride=(1, 1))
(squeeze_activation): ReLU(inplace=True)
(expand1x1): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1))
(expand1x1_activation): ReLU(inplace=True)
(expand3x3): Conv2d(64, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(expand3x3_activation): ReLU(inplace=True)
)
(11): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=True)
(12): Fire(
(squeeze): Conv2d(512, 64, kernel_size=(1, 1), stride=(1, 1))
(squeeze_activation): ReLU(inplace=True)
(expand1x1): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1))
(expand1x1_activation): ReLU(inplace=True)
(expand3x3): Conv2d(64, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(expand3x3_activation): ReLU(inplace=True)
)
)
(classifier): Sequential(
(0): Dropout(p=0.5, inplace=False)
(1): Conv2d(512, 1000, kernel_size=(1, 1), stride=(1, 1))
(2): ReLU(inplace=True)
(3): AvgPool2d(kernel_size=13, stride=1, padding=0)
)
)
Mobilenet
https://www.cnblogs.com/dengshunge/p/11334640.html
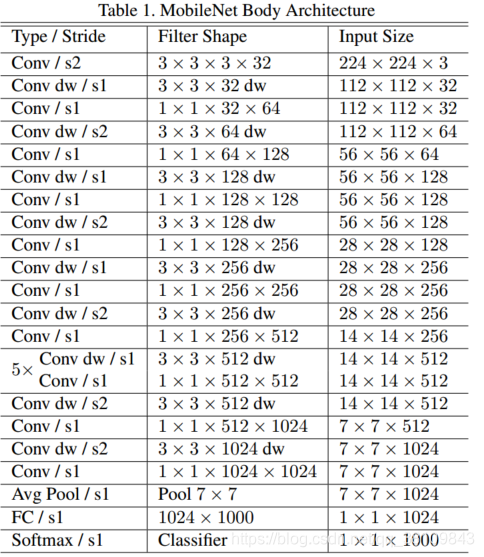
V1
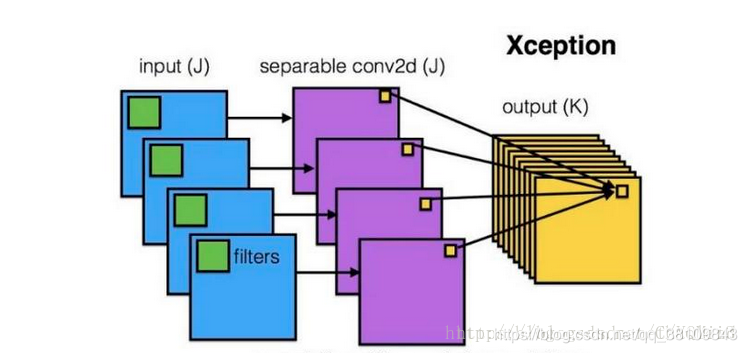
深度可分离卷积:

1、宽度因子α,典型值为1,0.75,0.5,0.25。
2、分辨率因子ρ

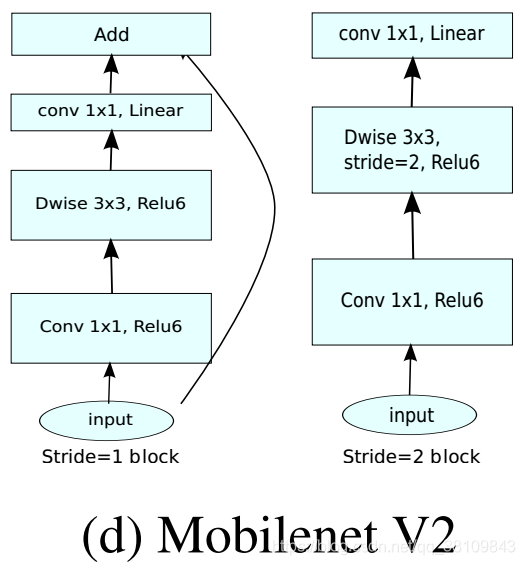
V2
Inverted Residuals,倒残差
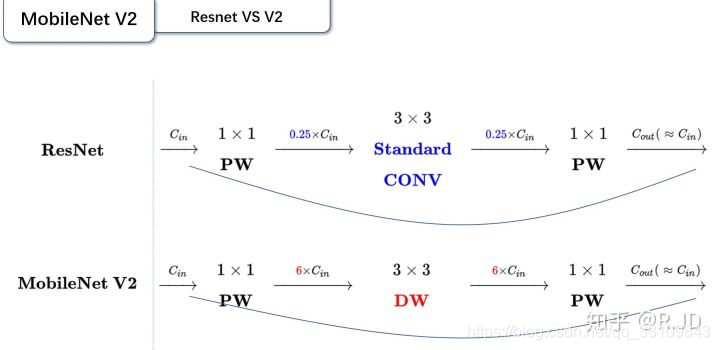
Linear Bottleneck

import torch.nn as nn
import torch
class BottleNeck(nn.Module):
def __init__(self, inchannles, outchannels, expansion=1, stride=1, downsample=None):
super(BottleNeck, self).__init__()
# 1*1
self.conv1 = nn.Conv2d(inchannles, inchannles * expansion, kernel_size=1)
self.bn1 = nn.BatchNorm2d(inchannles * expansion)
# 3*3 可分离卷积 groups设置
self.conv2 = nn.Conv2d(inchannles * expansion, inchannles * expansion, kernel_size=3, padding=1, stride=stride,
groups=inchannles * expansion)
self.bn2 = nn.BatchNorm2d(inchannles * expansion)
# 1*1
self.conv3 = nn.Conv2d(inchannles * expansion, outchannels, kernel_size=1)
self.bn3 = nn.BatchNorm2d(outchannels)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
def forward(self, x):
residul = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
residul = self.downsample(x)
out += residul
out = self.relu(out)
return out
class MobileNetV2(nn.Module):
def __init__(self, n, numclasses=1000):
super(MobileNetV2, self).__init__()
self.inchannels = 32
self.conv1 = nn.Conv2d(3, 32, kernel_size=3, stride=2, padding=1)
self.bn1 = nn.BatchNorm2d(32)
self.relu = nn.ReLU(inplace=True)
self.layer1 = self.make_layer(n[0], outchannels=16, stride=1, expansion=1)
self.layer2 = self.make_layer(n[1], outchannels=24, stride=2, expansion=6)
self.layer3 = self.make_layer(n[2], outchannels=32, stride=2, expansion=6)
self.layer4 = self.make_layer(n[3], outchannels=64, stride=2, expansion=6)
self.layer5 = self.make_layer(n[4], outchannels=96, stride=1, expansion=6)
self.layer6 = self.make_layer(n[5], outchannels=160, stride=2, expansion=6)
self.layer7 = self.make_layer(n[6], outchannels=320, stride=1, expansion=1)
self.conv8 = nn.Conv2d(320, 1280, kernel_size=1, stride=1)
self.avegpool = nn.AvgPool2d(7, stride=1)
self.conv9 = nn.Conv2d(1280, numclasses, kernel_size=1, stride=1)
def make_layer(self, blocks_num, outchannels, stride, expansion):
downsample_ = nn.Sequential(
nn.Conv2d(self.inchannels, outchannels, kernel_size=1, stride=stride),
nn.BatchNorm2d(outchannels)
)
layers = []
# 下采样的shortcut有downsample
temp = BottleNeck(self.inchannels, outchannels, expansion=expansion, stride=stride, downsample=downsample_)
layers.append(temp)
# 剩下的shortcut干净
self.inchannels = outchannels
for i in range(1, blocks_num):
layers.append(BottleNeck(self.inchannels, outchannels, expansion=expansion, stride=1))
return nn.Sequential(*layers) # 取出每一层
def forward(self, x):
x = self.conv1(x)
print('conv1.shape:', x.shape)
x = self.bn1(x)
x = self.relu(x)
x = self.layer1(x)
print('layer1.shape:', x.shape)
x = self.layer2(x)
print('layer2.shape:', x.shape)
x = self.layer3(x)
print('layer3.shape:', x.shape)
x = self.layer4(x)
print('layer4.shape:', x.shape)
x = self.layer5(x)
print('layer5.shape:', x.shape)
x = self.layer6(x)
print('layer6.shape:', x.shape)
x = self.layer7(x)
print('layer7.shape:', x.shape)
x = self.conv8(x)
print('conv8.shape:', x.shape)
x = self.avegpool(x)
print('avegpool:', x.shape)
x = self.conv9(x)
print('conv9.shape:', x.shape)
x = x.view(x.size(0), -1)
return x
def BottleNeck_test():
inchannels = 3
outchannels = 3
stride = 2
downsample_ = nn.Sequential(
nn.Conv2d(inchannels, outchannels, kernel_size=1, stride=stride),
nn.BatchNorm2d(outchannels)
)
bottleneck = BottleNeck(inchannels, outchannels, expansion=2, downsample=downsample_, stride=stride)
print('bottleneck:', bottleneck)
x = torch.rand((8, 3, 224, 224))
out = bottleneck(x)
print('out.shape', out.shape)
def weigth_init(m):
if isinstance(m, nn.Conv2d):
nn.init.xavier_uniform_(m.weight.data)
nn.init.constant_(m.bias.data, 0.1)
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
elif isinstance(m, nn.Linear):
m.weight.data.normal_(0, 0.01)
m.bias.data.zero_()
# print('weigth_init!')
def MobileNetV2_test():
model = MobileNetV2(n=[1, 2, 3, 4, 3, 3, 1], numclasses=10)
print(model)
model.apply(weigth_init)
# print('model:', model)
x = torch.rand((8, 3, 224, 224))
out = model(x)
print('out.shape', out.shape)
if __name__ == '__main__':
# BottleNeck_test()
MobileNetV2_test()
MobileNetV2(
(conv1): Conv2d(3, 32, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(layer1): Sequential(
(0): BottleNeck(
(conv1): Conv2d(32, 32, kernel_size=(1, 1), stride=(1, 1))
(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=32)
(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(32, 16, kernel_size=(1, 1), stride=(1, 1))
(bn3): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(32, 16, kernel_size=(1, 1), stride=(1, 1))
(1): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
)
(layer2): Sequential(
(0): BottleNeck(
(conv1): Conv2d(16, 96, kernel_size=(1, 1), stride=(1, 1))
(bn1): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(96, 96, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), groups=96)
(bn2): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(96, 24, kernel_size=(1, 1), stride=(1, 1))
(bn3): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(16, 24, kernel_size=(1, 1), stride=(2, 2))
(1): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BottleNeck(
(conv1): Conv2d(24, 144, kernel_size=(1, 1), stride=(1, 1))
(bn1): BatchNorm2d(144, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(144, 144, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=144)
(bn2): BatchNorm2d(144, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(144, 24, kernel_size=(1, 1), stride=(1, 1))
(bn3): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer3): Sequential(
(0): BottleNeck(
(conv1): Conv2d(24, 144, kernel_size=(1, 1), stride=(1, 1))
(bn1): BatchNorm2d(144, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(144, 144, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), groups=144)
(bn2): BatchNorm2d(144, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(144, 32, kernel_size=(1, 1), stride=(1, 1))
(bn3): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(24, 32, kernel_size=(1, 1), stride=(2, 2))
(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BottleNeck(
(conv1): Conv2d(32, 192, kernel_size=(1, 1), stride=(1, 1))
(bn1): BatchNorm2d(192, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(192, 192, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=192)
(bn2): BatchNorm2d(192, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(192, 32, kernel_size=(1, 1), stride=(1, 1))
(bn3): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): BottleNeck(
(conv1): Conv2d(32, 192, kernel_size=(1, 1), stride=(1, 1))
(bn1): BatchNorm2d(192, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(192, 192, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=192)
(bn2): BatchNorm2d(192, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(192, 32, kernel_size=(1, 1), stride=(1, 1))
(bn3): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer4): Sequential(
(0): BottleNeck(
(conv1): Conv2d(32, 192, kernel_size=(1, 1), stride=(1, 1))
(bn1): BatchNorm2d(192, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(192, 192, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), groups=192)
(bn2): BatchNorm2d(192, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(192, 64, kernel_size=(1, 1), stride=(1, 1))
(bn3): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(32, 64, kernel_size=(1, 1), stride=(2, 2))
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BottleNeck(
(conv1): Conv2d(64, 384, kernel_size=(1, 1), stride=(1, 1))
(bn1): BatchNorm2d(384, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(384, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=384)
(bn2): BatchNorm2d(384, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(384, 64, kernel_size=(1, 1), stride=(1, 1))
(bn3): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): BottleNeck(
(conv1): Conv2d(64, 384, kernel_size=(1, 1), stride=(1, 1))
(bn1): BatchNorm2d(384, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(384, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=384)
(bn2): BatchNorm2d(384, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(384, 64, kernel_size=(1, 1), stride=(1, 1))
(bn3): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(3): BottleNeck(
(conv1): Conv2d(64, 384, kernel_size=(1, 1), stride=(1, 1))
(bn1): BatchNorm2d(384, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(384, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=384)
(bn2): BatchNorm2d(384, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(384, 64, kernel_size=(1, 1), stride=(1, 1))
(bn3): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer5): Sequential(
(0): BottleNeck(
(conv1): Conv2d(64, 384, kernel_size=(1, 1), stride=(1, 1))
(bn1): BatchNorm2d(384, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(384, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=384)
(bn2): BatchNorm2d(384, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(384, 96, kernel_size=(1, 1), stride=(1, 1))
(bn3): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(64, 96, kernel_size=(1, 1), stride=(1, 1))
(1): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BottleNeck(
(conv1): Conv2d(96, 576, kernel_size=(1, 1), stride=(1, 1))
(bn1): BatchNorm2d(576, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(576, 576, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=576)
(bn2): BatchNorm2d(576, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(576, 96, kernel_size=(1, 1), stride=(1, 1))
(bn3): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): BottleNeck(
(conv1): Conv2d(96, 576, kernel_size=(1, 1), stride=(1, 1))
(bn1): BatchNorm2d(576, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(576, 576, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=576)
(bn2): BatchNorm2d(576, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(576, 96, kernel_size=(1, 1), stride=(1, 1))
(bn3): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer6): Sequential(
(0): BottleNeck(
(conv1): Conv2d(96, 576, kernel_size=(1, 1), stride=(1, 1))
(bn1): BatchNorm2d(576, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(576, 576, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), groups=576)
(bn2): BatchNorm2d(576, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(576, 160, kernel_size=(1, 1), stride=(1, 1))
(bn3): BatchNorm2d(160, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(96, 160, kernel_size=(1, 1), stride=(2, 2))
(1): BatchNorm2d(160, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BottleNeck(
(conv1): Conv2d(160, 960, kernel_size=(1, 1), stride=(1, 1))
(bn1): BatchNorm2d(960, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(960, 960, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=960)
(bn2): BatchNorm2d(960, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(960, 160, kernel_size=(1, 1), stride=(1, 1))
(bn3): BatchNorm2d(160, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): BottleNeck(
(conv1): Conv2d(160, 960, kernel_size=(1, 1), stride=(1, 1))
(bn1): BatchNorm2d(960, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(960, 960, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=960)
(bn2): BatchNorm2d(960, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(960, 160, kernel_size=(1, 1), stride=(1, 1))
(bn3): BatchNorm2d(160, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer7): Sequential(
(0): BottleNeck(
(conv1): Conv2d(160, 160, kernel_size=(1, 1), stride=(1, 1))
(bn1): BatchNorm2d(160, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(160, 160, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=160)
(bn2): BatchNorm2d(160, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(160, 320, kernel_size=(1, 1), stride=(1, 1))
(bn3): BatchNorm2d(320, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(160, 320, kernel_size=(1, 1), stride=(1, 1))
(1): BatchNorm2d(320, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
)
(conv8): Conv2d(320, 1280, kernel_size=(1, 1), stride=(1, 1))
(avegpool): AvgPool2d(kernel_size=7, stride=1, padding=0)
(conv9): Conv2d(1280, 10, kernel_size=(1, 1), stride=(1, 1))
)
conv1.shape: torch.Size([8, 32, 112, 112])
layer1.shape: torch.Size([8, 16, 112, 112])
layer2.shape: torch.Size([8, 24, 56, 56])
layer3.shape: torch.Size([8, 32, 28, 28])
layer4.shape: torch.Size([8, 64, 14, 14])
layer5.shape: torch.Size([8, 96, 14, 14])
layer6.shape: torch.Size([8, 160, 7, 7])
layer7.shape: torch.Size([8, 320, 7, 7])
conv8.shape: torch.Size([8, 1280, 7, 7])
avegpool: torch.Size([8, 1280, 1, 1])
conv9.shape: torch.Size([8, 10, 1, 1])
out.shape torch.Size([8, 10])
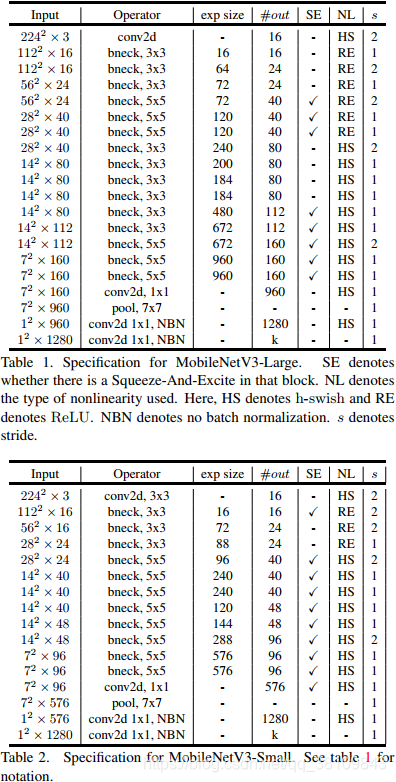
V3
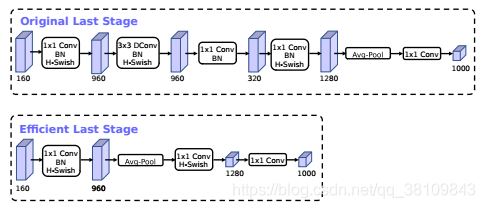
v3版本结合了v1的深度可分离卷积、v2的Inverted Residuals和Linear Bottleneck、SE模块,利用NAS(神经结构搜索)来搜索网络的配置和参数。
作者发现,计算资源耗费最多的层是网络的输入和输出层,因此作者对这两部分进行了改进。如下图所示,上面是v2的最后输出几层,下面是v3的最后输出的几层。可以看出,v3版本将平均池化层提前了。在使用11卷积进行扩张后,就紧接池化层-激活函数,最后使用11的卷积进行输出。通过这一改变,能减少10ms的延迟,提高了15%的运算速度,且几乎没有任何精度损失。其次,对于v2的输入层,通过3*3卷积将输入扩张成32维。作者发现使用ReLU或者switch激活函数,能将通道数缩减到16维,且准确率保持不变。这又能节省3ms的延时。
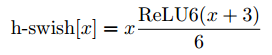
由于嵌入式设备计算sigmoid是会耗费相当大的计算资源的,因此作者提出了h-switch作为激活函数。且随着网络的加深,非线性激活函数的成本也会随之减少。所以,只有在较深的层使用h-switch才能获得更大的优势。
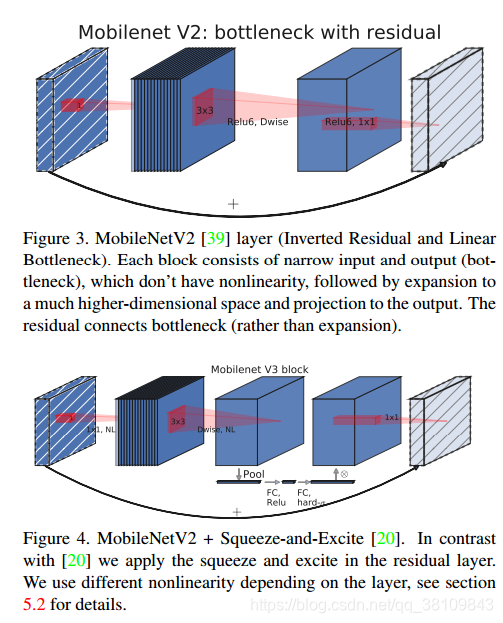
在v2的block上引入SE模块,SE模块是一种轻量级的通道注意力模块。在depthwise之后,经过池化层,然后第一个fc层,通道数缩小4倍,再经过第二个fc层,通道数变换回去(扩大4倍),然后与depthwise进行按位相加。
最后,v3的结构如下图所示。作者提供了两个版本的v3,分别是large和small,对应于高资源和低资源的情况。两者都是使用NAS进行搜索出来的。
pytorch代码实现
mport torch
import torch.nn as nn
import torch.nn.functional as F
__all__ = ['MobileNetV3', 'mobilenetv3']
def conv_bn(inp, oup, stride, conv_layer=nn.Conv2d, norm_layer=nn.BatchNorm2d, nlin_layer=nn.ReLU):
return nn.Sequential(
conv_layer(inp, oup, 3, stride, 1, bias=False),
norm_layer(oup),
nlin_layer(inplace=True)
)
def conv_1x1_bn(inp, oup, conv_layer=nn.Conv2d, norm_layer=nn.BatchNorm2d, nlin_layer=nn.ReLU):
return nn.Sequential(
conv_layer(inp, oup, 1, 1, 0, bias=False),
norm_layer(oup),
nlin_layer(inplace=True)
)
class Hswish(nn.Module):
def __init__(self, inplace=True):
super(Hswish, self).__init__()
self.inplace = inplace
def forward(self, x):
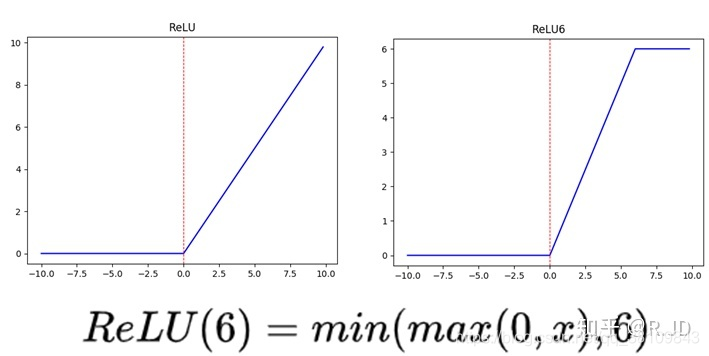
return x * F.relu6(x + 3., inplace=self.inplace) / 6.
class Hsigmoid(nn.Module):
def __init__(self, inplace=True):
super(Hsigmoid, self).__init__()
self.inplace = inplace
def forward(self, x):
return F.relu6(x + 3., inplace=self.inplace) / 6.
class SEModule(nn.Module):
def __init__(self, channel, reduction=4):
super(SEModule, self).__init__()
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.fc = nn.Sequential(
nn.Linear(channel, channel // reduction, bias=False),
nn.ReLU(inplace=True),
nn.Linear(channel // reduction, channel, bias=False),
Hsigmoid()
# nn.Sigmoid()
)
def forward(self, x):
b, c, _, _ = x.size()
y = self.avg_pool(x).view(b, c)
y = self.fc(y).view(b, c, 1, 1)
return x * y.expand_as(x)
class Identity(nn.Module):
def __init__(self, channel):
super(Identity, self).__init__()
def forward(self, x):
return x
def make_divisible(x, divisible_by=8):
import numpy as np
return int(np.ceil(x * 1. / divisible_by) * divisible_by)
class MobileBottleneck(nn.Module):
def __init__(self, inp, oup, kernel, stride, exp, se=False, nl='RE'):
super(MobileBottleneck, self).__init__()
assert stride in [1, 2]
assert kernel in [3, 5]
padding = (kernel - 1) // 2
self.use_res_connect = stride == 1 and inp == oup
conv_layer = nn.Conv2d
norm_layer = nn.BatchNorm2d
if nl == 'RE':
nlin_layer = nn.ReLU # or ReLU6
elif nl == 'HS':
nlin_layer = Hswish
else:
raise NotImplementedError
if se:
SELayer = SEModule
else:
SELayer = Identity
self.conv = nn.Sequential(
# pw
conv_layer(inp, exp, 1, 1, 0, bias=False),
norm_layer(exp),
nlin_layer(inplace=True),
# dw
conv_layer(exp, exp, kernel, stride, padding, groups=exp, bias=False),
norm_layer(exp),
SELayer(exp),
nlin_layer(inplace=True),
# pw-linear
conv_layer(exp, oup, 1, 1, 0, bias=False),
norm_layer(oup),
)
def forward(self, x):
if self.use_res_connect:
return x + self.conv(x)
else:
return self.conv(x)
class MobileNetV3(nn.Module):
def __init__(self, n_class=1000, input_size=224, dropout=0.8, mode='small', width_mult=1.0):
super(MobileNetV3, self).__init__()
input_channel = 16
last_channel = 1280
if mode == 'large':
# refer to Table 1 in paper
mobile_setting = [
# k, exp, c, se, nl, s,
[3, 16, 16, False, 'RE', 1],
[3, 64, 24, False, 'RE', 2],
[3, 72, 24, False, 'RE', 1],
[5, 72, 40, True, 'RE', 2],
[5, 120, 40, True, 'RE', 1],
[5, 120, 40, True, 'RE', 1],
[3, 240, 80, False, 'HS', 2],
[3, 200, 80, False, 'HS', 1],
[3, 184, 80, False, 'HS', 1],
[3, 184, 80, False, 'HS', 1],
[3, 480, 112, True, 'HS', 1],
[3, 672, 112, True, 'HS', 1],
[5, 672, 160, True, 'HS', 2],
[5, 960, 160, True, 'HS', 1],
[5, 960, 160, True, 'HS', 1],
]
elif mode == 'small':
# refer to Table 2 in paper
mobile_setting = [
# k, exp, c, se, nl, s,
[3, 16, 16, True, 'RE', 2],
[3, 72, 24, False, 'RE', 2],
[3, 88, 24, False, 'RE', 1],
[5, 96, 40, True, 'HS', 2],
[5, 240, 40, True, 'HS', 1],
[5, 240, 40, True, 'HS', 1],
[5, 120, 48, True, 'HS', 1],
[5, 144, 48, True, 'HS', 1],
[5, 288, 96, True, 'HS', 2],
[5, 576, 96, True, 'HS', 1],
[5, 576, 96, True, 'HS', 1],
]
else:
raise NotImplementedError
# building first layer
assert input_size % 32 == 0
last_channel = make_divisible(last_channel * width_mult) if width_mult > 1.0 else last_channel
self.features = [conv_bn(3, input_channel, 2, nlin_layer=Hswish)]
self.classifier = []
# building mobile blocks
for k, exp, c, se, nl, s in mobile_setting:
output_channel = make_divisible(c * width_mult)
exp_channel = make_divisible(exp * width_mult)
self.features.append(MobileBottleneck(input_channel, output_channel, k, s, exp_channel, se, nl))
input_channel = output_channel
# building last several layers
if mode == 'large':
last_conv = make_divisible(960 * width_mult)
self.features.append(conv_1x1_bn(input_channel, last_conv, nlin_layer=Hswish))
self.features.append(nn.AdaptiveAvgPool2d(1))
self.features.append(nn.Conv2d(last_conv, last_channel, 1, 1, 0))
self.features.append(Hswish(inplace=True))
elif mode == 'small':
last_conv = make_divisible(576 * width_mult)
self.features.append(conv_1x1_bn(input_channel, last_conv, nlin_layer=Hswish))
# self.features.append(SEModule(last_conv)) # refer to paper Table2, but I think this is a mistake
self.features.append(nn.AdaptiveAvgPool2d(1))
self.features.append(nn.Conv2d(last_conv, last_channel, 1, 1, 0))
self.features.append(Hswish(inplace=True))
else:
raise NotImplementedError
# make it nn.Sequential
self.features = nn.Sequential(*self.features)
# building classifier
self.classifier = nn.Sequential(
nn.Dropout(p=dropout), # refer to paper section 6
nn.Linear(last_channel, n_class),
)
self._initialize_weights()
def forward(self, x):
x = self.features(x)
x = x.mean(3).mean(2)
x = self.classifier(x)
return x
def _initialize_weights(self):
# weight initialization
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out')
if m.bias is not None:
nn.init.zeros_(m.bias)
elif isinstance(m, nn.BatchNorm2d):
nn.init.ones_(m.weight)
nn.init.zeros_(m.bias)
elif isinstance(m, nn.Linear):
nn.init.normal_(m.weight, 0, 0.01)
if m.bias is not None:
nn.init.zeros_(m.bias)
def mobilenetv3(pretrained=False, **kwargs):
model = MobileNetV3(**kwargs)
if pretrained:
state_dict = torch.load('mobilenetv3_small_67.4.pth.tar')
model.load_state_dict(state_dict, strict=True)
# raise NotImplementedError
return model
if __name__ == '__main__':
net = mobilenetv3()
print('mobilenetv3:\n', net)
print('Total params: %.2fM' % (sum(p.numel() for p in net.parameters())/1000000.0))
input_size=(1, 3, 224, 224)
input = torch.randn(input_size)
# pip install --upgrade git+https://github.com/kuan-wang/pytorch-OpCounter.git
from thop import profile
flops, params = profile(net, inputs=(input,))
# print(flops)
# print(params)
print('Total params: %.2fM' % (params/1000000.0))
print('Total flops: %.2fM' % (flops/1000000.0))
out = net(input)
mobilenetv3:
MobileNetV3(
(features): Sequential(
(0): Sequential(
(0): Conv2d(3, 16, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Hswish()
)
(1): MobileBottleneck(
(conv): Sequential(
(0): Conv2d(16, 16, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(16, 16, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), groups=16, bias=False)
(4): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): SEModule(
(avg_pool): AdaptiveAvgPool2d(output_size=1)
(fc): Sequential(
(0): Linear(in_features=16, out_features=4, bias=False)
(1): ReLU(inplace=True)
(2): Linear(in_features=4, out_features=16, bias=False)
(3): Hsigmoid()
)
)
(6): ReLU(inplace=True)
(7): Conv2d(16, 16, kernel_size=(1, 1), stride=(1, 1), bias=False)
(8): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(2): MobileBottleneck(
(conv): Sequential(
(0): Conv2d(16, 72, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(72, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(72, 72, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), groups=72, bias=False)
(4): BatchNorm2d(72, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): Identity()
(6): ReLU(inplace=True)
(7): Conv2d(72, 24, kernel_size=(1, 1), stride=(1, 1), bias=False)
(8): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(3): MobileBottleneck(
(conv): Sequential(
(0): Conv2d(24, 88, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(88, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(88, 88, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=88, bias=False)
(4): BatchNorm2d(88, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): Identity()
(6): ReLU(inplace=True)
(7): Conv2d(88, 24, kernel_size=(1, 1), stride=(1, 1), bias=False)
(8): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(4): MobileBottleneck(
(conv): Sequential(
(0): Conv2d(24, 96, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Hswish()
(3): Conv2d(96, 96, kernel_size=(5, 5), stride=(2, 2), padding=(2, 2), groups=96, bias=False)
(4): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): SEModule(
(avg_pool): AdaptiveAvgPool2d(output_size=1)
(fc): Sequential(
(0): Linear(in_features=96, out_features=24, bias=False)
(1): ReLU(inplace=True)
(2): Linear(in_features=24, out_features=96, bias=False)
(3): Hsigmoid()
)
)
(6): Hswish()
(7): Conv2d(96, 40, kernel_size=(1, 1), stride=(1, 1), bias=False)
(8): BatchNorm2d(40, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(5): MobileBottleneck(
(conv): Sequential(
(0): Conv2d(40, 240, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(240, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Hswish()
(3): Conv2d(240, 240, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2), groups=240, bias=False)
(4): BatchNorm2d(240, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): SEModule(
(avg_pool): AdaptiveAvgPool2d(output_size=1)
(fc): Sequential(
(0): Linear(in_features=240, out_features=60, bias=False)
(1): ReLU(inplace=True)
(2): Linear(in_features=60, out_features=240, bias=False)
(3): Hsigmoid()
)
)
(6): Hswish()
(7): Conv2d(240, 40, kernel_size=(1, 1), stride=(1, 1), bias=False)
(8): BatchNorm2d(40, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(6): MobileBottleneck(
(conv): Sequential(
(0): Conv2d(40, 240, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(240, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Hswish()
(3): Conv2d(240, 240, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2), groups=240, bias=False)
(4): BatchNorm2d(240, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): SEModule(
(avg_pool): AdaptiveAvgPool2d(output_size=1)
(fc): Sequential(
(0): Linear(in_features=240, out_features=60, bias=False)
(1): ReLU(inplace=True)
(2): Linear(in_features=60, out_features=240, bias=False)
(3): Hsigmoid()
)
)
(6): Hswish()
(7): Conv2d(240, 40, kernel_size=(1, 1), stride=(1, 1), bias=False)
(8): BatchNorm2d(40, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(7): MobileBottleneck(
(conv): Sequential(
(0): Conv2d(40, 120, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(120, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Hswish()
(3): Conv2d(120, 120, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2), groups=120, bias=False)
(4): BatchNorm2d(120, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): SEModule(
(avg_pool): AdaptiveAvgPool2d(output_size=1)
(fc): Sequential(
(0): Linear(in_features=120, out_features=30, bias=False)
(1): ReLU(inplace=True)
(2): Linear(in_features=30, out_features=120, bias=False)
(3): Hsigmoid()
)
)
(6): Hswish()
(7): Conv2d(120, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(8): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(8): MobileBottleneck(
(conv): Sequential(
(0): Conv2d(48, 144, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(144, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Hswish()
(3): Conv2d(144, 144, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2), groups=144, bias=False)
(4): BatchNorm2d(144, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): SEModule(
(avg_pool): AdaptiveAvgPool2d(output_size=1)
(fc): Sequential(
(0): Linear(in_features=144, out_features=36, bias=False)
(1): ReLU(inplace=True)
(2): Linear(in_features=36, out_features=144, bias=False)
(3): Hsigmoid()
)
)
(6): Hswish()
(7): Conv2d(144, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(8): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(9): MobileBottleneck(
(conv): Sequential(
(0): Conv2d(48, 288, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(288, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Hswish()
(3): Conv2d(288, 288, kernel_size=(5, 5), stride=(2, 2), padding=(2, 2), groups=288, bias=False)
(4): BatchNorm2d(288, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): SEModule(
(avg_pool): AdaptiveAvgPool2d(output_size=1)
(fc): Sequential(
(0): Linear(in_features=288, out_features=72, bias=False)
(1): ReLU(inplace=True)
(2): Linear(in_features=72, out_features=288, bias=False)
(3): Hsigmoid()
)
)
(6): Hswish()
(7): Conv2d(288, 96, kernel_size=(1, 1), stride=(1, 1), bias=False)
(8): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(10): MobileBottleneck(
(conv): Sequential(
(0): Conv2d(96, 576, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(576, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Hswish()
(3): Conv2d(576, 576, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2), groups=576, bias=False)
(4): BatchNorm2d(576, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): SEModule(
(avg_pool): AdaptiveAvgPool2d(output_size=1)
(fc): Sequential(
(0): Linear(in_features=576, out_features=144, bias=False)
(1): ReLU(inplace=True)
(2): Linear(in_features=144, out_features=576, bias=False)
(3): Hsigmoid()
)
)
(6): Hswish()
(7): Conv2d(576, 96, kernel_size=(1, 1), stride=(1, 1), bias=False)
(8): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(11): MobileBottleneck(
(conv): Sequential(
(0): Conv2d(96, 576, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(576, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Hswish()
(3): Conv2d(576, 576, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2), groups=576, bias=False)
(4): BatchNorm2d(576, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): SEModule(
(avg_pool): AdaptiveAvgPool2d(output_size=1)
(fc): Sequential(
(0): Linear(in_features=576, out_features=144, bias=False)
(1): ReLU(inplace=True)
(2): Linear(in_features=144, out_features=576, bias=False)
(3): Hsigmoid()
)
)
(6): Hswish()
(7): Conv2d(576, 96, kernel_size=(1, 1), stride=(1, 1), bias=False)
(8): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(12): Sequential(
(0): Conv2d(96, 576, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(576, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Hswish()
)
(13): AdaptiveAvgPool2d(output_size=1)
(14): Conv2d(576, 1280, kernel_size=(1, 1), stride=(1, 1))
(15): Hswish()
)
(classifier): Sequential(
(0): Dropout(p=0.8, inplace=False)
(1): Linear(in_features=1280, out_features=1000, bias=True)
)
)
Total params: 2.94M
Total params: 2.94M
Total flops: 65.39M
ShuffleNet
V1
https://www.cnblogs.com/hellcat/p/10318630.html
主要思想:分组卷积和通道清洗
1.卷积后一共得到g×n个输出通道的feature map;
2.将feature map 进行 reshape为(g,n);
3.进行转置为(n,g);
4.对转置结果flatten,再分回g组作为下一层的输入。
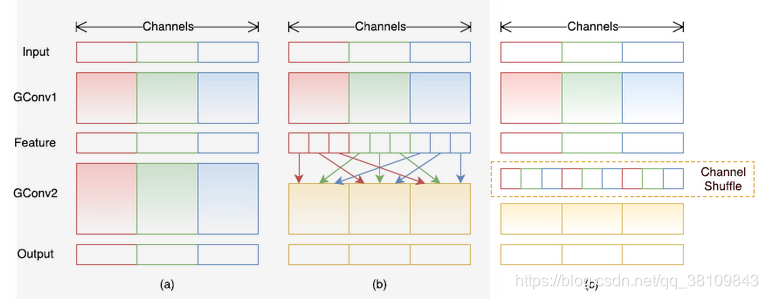
基本单元:
下图a展示了基本ResNet轻量级结构,这是一个包含3层的残差单元:首先是1x1卷积,然后是3x3的depthwise convolution(DWConv,主要是为了降低计算量),这里的3x3卷积是瓶颈层(bottleneck),紧接着是1x1卷积,最后是一个短路连接,将输入直接加到输出上。
下图b展示了改进思路:将密集的1x1卷积替换成1x1的group convolution,不过在第一个1x1卷积之后增加了一个channel shuffle操作。值得注意的是3x3卷积后面没有增加channel shuffle,按paper的意思,对于这样一个残差单元,一个channel shuffle操作是足够了。还有就是3x3的depthwise convolution之后没有使用ReLU激活函数。
下图c展示了其他改进,对原输入采用stride=2的3x3 avg pool,在depthwise convolution卷积处取stride=2保证两个通路shape相同,然后将得到特征图与输出进行连接(concat,借鉴了DenseNet?),而不是相加。极致的降低计算量与参数大小。
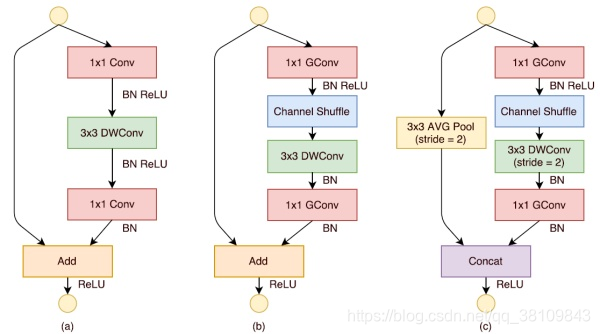
网络结构:
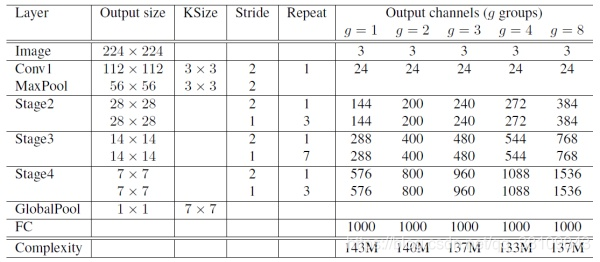
V2
https://mp.weixin.qq.com/s/tceLrEalafgL8R44DZYP9g
两个基本原则:第一,应该用直接指标(例如速度)替换间接指标(例如 FLOPs);第二,这些指标应该在目标平台上进行评估。
四个准则:
G1. 相同的通道宽度可最小化内存访问成本(MAC);
G2. 过度的组卷积会增加 MAC;
G3. 网络碎片化(例如 GoogLeNet 的多路径结构)会降低并行度;
G4. 元素级运算不可忽视。
(a)和(b)是ShuffleNet v1的两种不同block结构,两者的差别在于后者对特征图尺寸做了缩小,这和ResNet中某个stage的两种block功能类似,同理(c)和(d)是ShuffleNet v2的两种不同block结构:
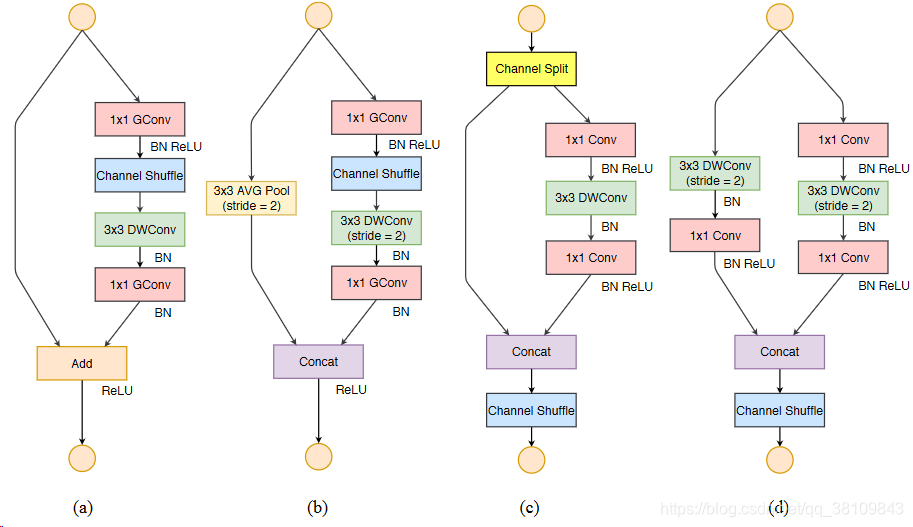
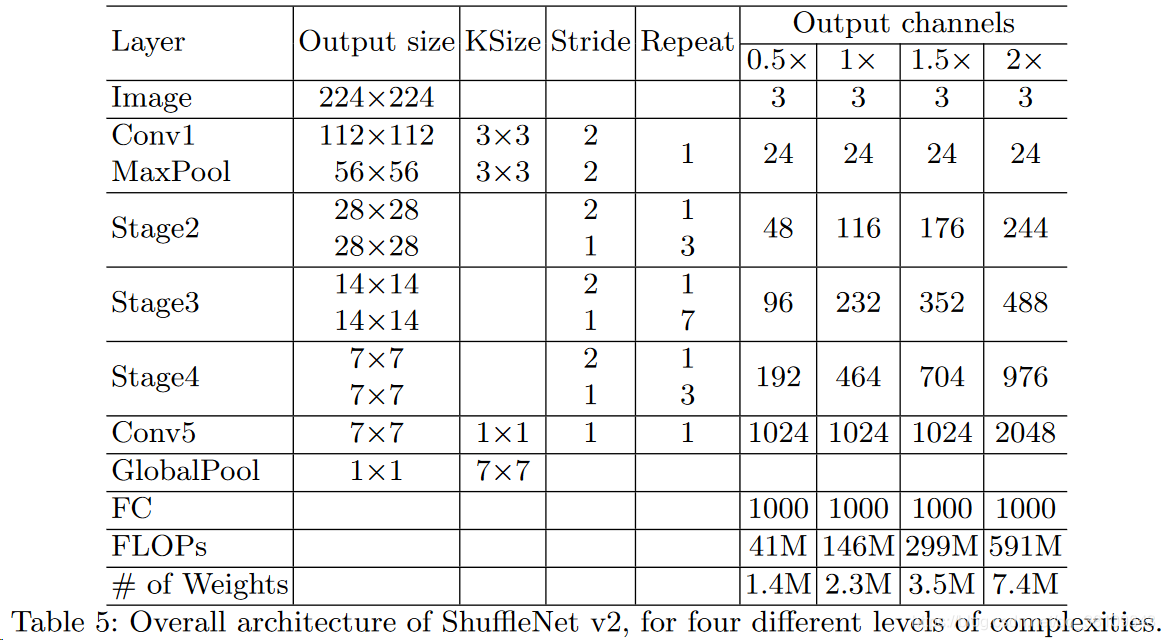
pytorch实现
import torch
import torch.nn as nn
__all__ = [
'ShuffleNetV2', 'shufflenet_v2_x0_5', 'shufflenet_v2_x1_0',
'shufflenet_v2_x1_5', 'shufflenet_v2_x2_0'
]
model_urls = {
'shufflenetv2_x0.5': 'https://download.pytorch.org/models/shufflenetv2_x0.5-f707e7126e.pth',
'shufflenetv2_x1.0': 'https://download.pytorch.org/models/shufflenetv2_x1-5666bf0f80.pth',
'shufflenetv2_x1.5': None,
'shufflenetv2_x2.0': None,
}
def channel_shuffle(x, groups):
# type: (torch.Tensor, int) -> torch.Tensor
batchsize, num_channels, height, width = x.data.size()
channels_per_group = num_channels // groups
# reshape
x = x.view(batchsize, groups,
channels_per_group, height, width)
x = torch.transpose(x, 1, 2).contiguous()
# flatten
x = x.view(batchsize, -1, height, width)
return x
class InvertedResidual(nn.Module):
def __init__(self, inp, oup, stride):
super(InvertedResidual, self).__init__()
if not (1 <= stride <= 3):
raise ValueError('illegal stride value')
self.stride = stride
branch_features = oup // 2
assert (self.stride != 1) or (inp == branch_features << 1)
if self.stride > 1:
self.branch1 = nn.Sequential(
self.depthwise_conv(inp, inp, kernel_size=3, stride=self.stride, padding=1),
nn.BatchNorm2d(inp),
nn.Conv2d(inp, branch_features, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(branch_features),
nn.ReLU(inplace=True),
)
else:
self.branch1 = nn.Sequential()
self.branch2 = nn.Sequential(
nn.Conv2d(inp if (self.stride > 1) else branch_features,
branch_features, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(branch_features),
nn.ReLU(inplace=True),
self.depthwise_conv(branch_features, branch_features, kernel_size=3, stride=self.stride, padding=1),
nn.BatchNorm2d(branch_features),
nn.Conv2d(branch_features, branch_features, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(branch_features),
nn.ReLU(inplace=True),
)
@staticmethod
def depthwise_conv(i, o, kernel_size, stride=1, padding=0, bias=False):
return nn.Conv2d(i, o, kernel_size, stride, padding, bias=bias, groups=i)
def forward(self, x):
if self.stride == 1:
x1, x2 = x.chunk(2, dim=1)
out = torch.cat((x1, self.branch2(x2)), dim=1)
else:
out = torch.cat((self.branch1(x), self.branch2(x)), dim=1)
out = channel_shuffle(out, 2)
return out
class ShuffleNetV2(nn.Module):
def __init__(self, stages_repeats, stages_out_channels, num_classes=1000, inverted_residual=InvertedResidual):
super(ShuffleNetV2, self).__init__()
if len(stages_repeats) != 3:
raise ValueError('expected stages_repeats as list of 3 positive ints')
if len(stages_out_channels) != 5:
raise ValueError('expected stages_out_channels as list of 5 positive ints')
self._stage_out_channels = stages_out_channels
input_channels = 3
output_channels = self._stage_out_channels[0]
self.conv1 = nn.Sequential(
nn.Conv2d(input_channels, output_channels, 3, 2, 1, bias=False),
nn.BatchNorm2d(output_channels),
nn.ReLU(inplace=True),
)
input_channels = output_channels
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
stage_names = ['stage{}'.format(i) for i in [2, 3, 4]]
for name, repeats, output_channels in zip(
stage_names, stages_repeats, self._stage_out_channels[1:]):
seq = [inverted_residual(input_channels, output_channels, 2)]
for i in range(repeats - 1):
seq.append(inverted_residual(output_channels, output_channels, 1))
setattr(self, name, nn.Sequential(*seq))
input_channels = output_channels
output_channels = self._stage_out_channels[-1]
self.conv5 = nn.Sequential(
nn.Conv2d(input_channels, output_channels, 1, 1, 0, bias=False),
nn.BatchNorm2d(output_channels),
nn.ReLU(inplace=True),
)
self.fc = nn.Linear(output_channels, num_classes)
def _forward_impl(self, x):
# See note [TorchScript super()]
x = self.conv1(x)
x = self.maxpool(x)
x = self.stage2(x)
x = self.stage3(x)
x = self.stage4(x)
x = self.conv5(x)
x = x.mean([2, 3]) # globalpool
x = self.fc(x)
return x
def forward(self, x):
return self._forward_impl(x)
def _shufflenetv2(arch, pretrained, progress, *args, **kwargs):
model = ShuffleNetV2(*args, **kwargs)
if pretrained:
model_url = model_urls[arch]
if model_url is None:
raise NotImplementedError('pretrained {} is not supported as of now'.format(arch))
return model
def shufflenet_v2_x0_5(pretrained=False, progress=True, **kwargs):
"""
Constructs a ShuffleNetV2 with 0.5x output channels, as described in
`"ShuffleNet V2: Practical Guidelines for Efficient CNN Architecture Design"
<https://arxiv.org/abs/1807.11164>`_.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
progress (bool): If True, displays a progress bar of the download to stderr
"""
return _shufflenetv2('shufflenetv2_x0.5', pretrained, progress,
[4, 8, 4], [24, 48, 96, 192, 1024], **kwargs)
def shufflenet_v2_x1_0(pretrained=False, progress=True, **kwargs):
"""
Constructs a ShuffleNetV2 with 1.0x output channels, as described in
`"ShuffleNet V2: Practical Guidelines for Efficient CNN Architecture Design"
<https://arxiv.org/abs/1807.11164>`_.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
progress (bool): If True, displays a progress bar of the download to stderr
"""
return _shufflenetv2('shufflenetv2_x1.0', pretrained, progress,
[4, 8, 4], [24, 116, 232, 464, 1024], **kwargs)
def shufflenet_v2_x1_5(pretrained=False, progress=True, **kwargs):
"""
Constructs a ShuffleNetV2 with 1.5x output channels, as described in
`"ShuffleNet V2: Practical Guidelines for Efficient CNN Architecture Design"
<https://arxiv.org/abs/1807.11164>`_.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
progress (bool): If True, displays a progress bar of the download to stderr
"""
return _shufflenetv2('shufflenetv2_x1.5', pretrained, progress,
[4, 8, 4], [24, 176, 352, 704, 1024], **kwargs)
def shufflenet_v2_x2_0(pretrained=False, progress=True, **kwargs):
"""
Constructs a ShuffleNetV2 with 2.0x output channels, as described in
`"ShuffleNet V2: Practical Guidelines for Efficient CNN Architecture Design"
<https://arxiv.org/abs/1807.11164>`_.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
progress (bool): If True, displays a progress bar of the download to stderr
"""
return _shufflenetv2('shufflenetv2_x2.0', pretrained, progress,
[4, 8, 4], [24, 244, 488, 976, 2048], **kwargs)
net = shufflenet_v2_x0_5()
# net = shufflenet_v2_x1_0()
# net = shufflenet_v2_x1_5()
# net = shufflenet_v2_x2_0()
print(net)
ShuffleNetV2(
(conv1): Sequential(
(0): Conv2d(3, 24, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(stage2): Sequential(
(0): InvertedResidual(
(branch1): Sequential(
(0): Conv2d(24, 24, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), groups=24, bias=False)
(1): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Conv2d(24, 24, kernel_size=(1, 1), stride=(1, 1), bias=False)
(3): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(4): ReLU(inplace=True)
)
(branch2): Sequential(
(0): Conv2d(24, 24, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(24, 24, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), groups=24, bias=False)
(4): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): Conv2d(24, 24, kernel_size=(1, 1), stride=(1, 1), bias=False)
(6): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(7): ReLU(inplace=True)
)
)
(1): InvertedResidual(
(branch1): Sequential()
(branch2): Sequential(
(0): Conv2d(24, 24, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(24, 24, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=24, bias=False)
(4): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): Conv2d(24, 24, kernel_size=(1, 1), stride=(1, 1), bias=False)
(6): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(7): ReLU(inplace=True)
)
)
(2): InvertedResidual(
(branch1): Sequential()
(branch2): Sequential(
(0): Conv2d(24, 24, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(24, 24, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=24, bias=False)
(4): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): Conv2d(24, 24, kernel_size=(1, 1), stride=(1, 1), bias=False)
(6): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(7): ReLU(inplace=True)
)
)
(3): InvertedResidual(
(branch1): Sequential()
(branch2): Sequential(
(0): Conv2d(24, 24, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(24, 24, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=24, bias=False)
(4): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): Conv2d(24, 24, kernel_size=(1, 1), stride=(1, 1), bias=False)
(6): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(7): ReLU(inplace=True)
)
)
)
(stage3): Sequential(
(0): InvertedResidual(
(branch1): Sequential(
(0): Conv2d(48, 48, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), groups=48, bias=False)
(1): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Conv2d(48, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(3): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(4): ReLU(inplace=True)
)
(branch2): Sequential(
(0): Conv2d(48, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(48, 48, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), groups=48, bias=False)
(4): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): Conv2d(48, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(6): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(7): ReLU(inplace=True)
)
)
(1): InvertedResidual(
(branch1): Sequential()
(branch2): Sequential(
(0): Conv2d(48, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(48, 48, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=48, bias=False)
(4): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): Conv2d(48, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(6): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(7): ReLU(inplace=True)
)
)
(2): InvertedResidual(
(branch1): Sequential()
(branch2): Sequential(
(0): Conv2d(48, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(48, 48, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=48, bias=False)
(4): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): Conv2d(48, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(6): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(7): ReLU(inplace=True)
)
)
(3): InvertedResidual(
(branch1): Sequential()
(branch2): Sequential(
(0): Conv2d(48, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(48, 48, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=48, bias=False)
(4): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): Conv2d(48, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(6): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(7): ReLU(inplace=True)
)
)
(4): InvertedResidual(
(branch1): Sequential()
(branch2): Sequential(
(0): Conv2d(48, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(48, 48, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=48, bias=False)
(4): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): Conv2d(48, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(6): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(7): ReLU(inplace=True)
)
)
(5): InvertedResidual(
(branch1): Sequential()
(branch2): Sequential(
(0): Conv2d(48, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(48, 48, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=48, bias=False)
(4): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): Conv2d(48, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(6): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(7): ReLU(inplace=True)
)
)
(6): InvertedResidual(
(branch1): Sequential()
(branch2): Sequential(
(0): Conv2d(48, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(48, 48, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=48, bias=False)
(4): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): Conv2d(48, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(6): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(7): ReLU(inplace=True)
)
)
(7): InvertedResidual(
(branch1): Sequential()
(branch2): Sequential(
(0): Conv2d(48, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(48, 48, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=48, bias=False)
(4): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): Conv2d(48, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(6): BatchNorm2d(48, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(7): ReLU(inplace=True)
)
)
)
(stage4): Sequential(
(0): InvertedResidual(
(branch1): Sequential(
(0): Conv2d(96, 96, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), groups=96, bias=False)
(1): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Conv2d(96, 96, kernel_size=(1, 1), stride=(1, 1), bias=False)
(3): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(4): ReLU(inplace=True)
)
(branch2): Sequential(
(0): Conv2d(96, 96, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(96, 96, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), groups=96, bias=False)
(4): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): Conv2d(96, 96, kernel_size=(1, 1), stride=(1, 1), bias=False)
(6): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(7): ReLU(inplace=True)
)
)
(1): InvertedResidual(
(branch1): Sequential()
(branch2): Sequential(
(0): Conv2d(96, 96, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(96, 96, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=96, bias=False)
(4): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): Conv2d(96, 96, kernel_size=(1, 1), stride=(1, 1), bias=False)
(6): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(7): ReLU(inplace=True)
)
)
(2): InvertedResidual(
(branch1): Sequential()
(branch2): Sequential(
(0): Conv2d(96, 96, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(96, 96, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=96, bias=False)
(4): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): Conv2d(96, 96, kernel_size=(1, 1), stride=(1, 1), bias=False)
(6): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(7): ReLU(inplace=True)
)
)
(3): InvertedResidual(
(branch1): Sequential()
(branch2): Sequential(
(0): Conv2d(96, 96, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(96, 96, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=96, bias=False)
(4): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): Conv2d(96, 96, kernel_size=(1, 1), stride=(1, 1), bias=False)
(6): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(7): ReLU(inplace=True)
)
)
)
(conv5): Sequential(
(0): Conv2d(192, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(fc): Linear(in_features=1024, out_features=1000, bias=True)
)
HRNet
V1:https://segmentfault.com/a/1190000019167646
V2:https://blog.youkuaiyun.com/gefeng1209/article/details/93142916
网络结构:https://blog.youkuaiyun.com/yudw15/article/details/99600651,这个有些细节有点问题,不过已经很好了
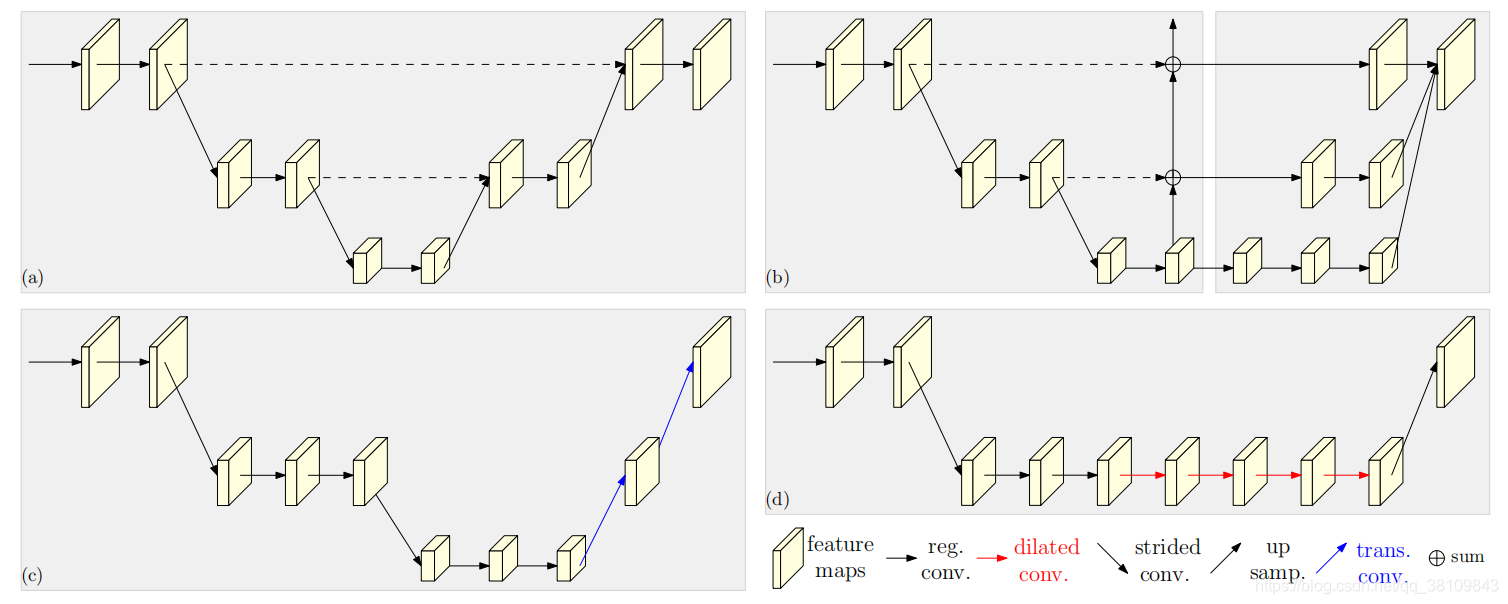
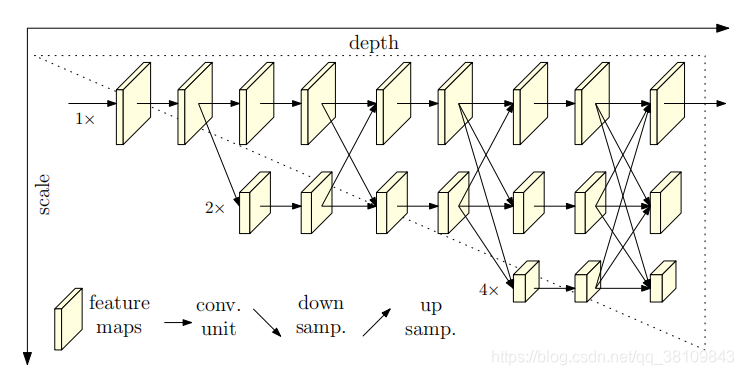
V1应用:
人体姿态
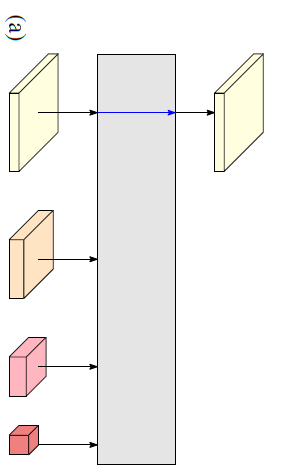
V2应用:
语义分割
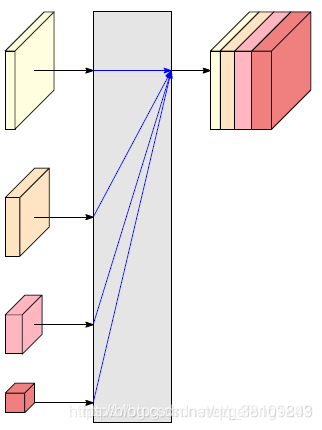
图像分类
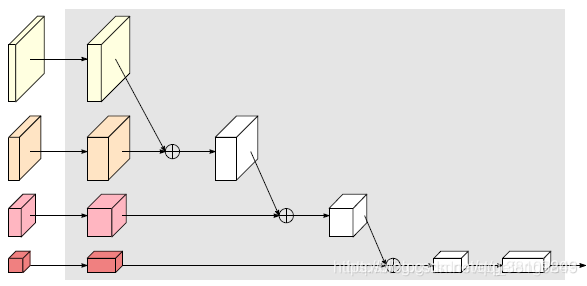
目标检测
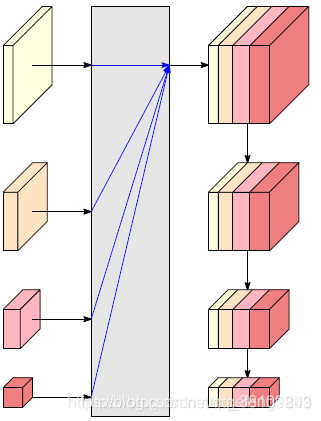
pytorch实现
# ------------------------------------------------------------------------------
# Copyright (c) Microsoft
# Licensed under the MIT License.
# Written by Bin Xiao (Bin.Xiao@microsoft.com)
# Modified by Ke Sun (sunk@mail.ustc.edu.cn)
# ------------------------------------------------------------------------------
from __future__ import absolute_import
from __future__ import division
from __future__ import print_function
import os
import logging
import functools
from HRNet_config import _C as config
import numpy as np
import torch
import torch.nn as nn
import torch._utils
import torch.nn.functional as F
BN_MOMENTUM = 0.1
logger = logging.getLogger(__name__)
def conv3x3(in_planes, out_planes, stride=1):
"""3x3 convolution with padding"""
return nn.Conv2d(in_planes, out_planes, kernel_size=3, stride=stride,
padding=1, bias=False)
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(BasicBlock, self).__init__()
self.conv1 = conv3x3(inplanes, planes, stride)
self.bn1 = nn.BatchNorm2d(planes, momentum=BN_MOMENTUM)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = nn.BatchNorm2d(planes, momentum=BN_MOMENTUM)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes, momentum=BN_MOMENTUM)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride,
padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes, momentum=BN_MOMENTUM)
self.conv3 = nn.Conv2d(planes, planes * self.expansion, kernel_size=1,
bias=False)
self.bn3 = nn.BatchNorm2d(planes * self.expansion,
momentum=BN_MOMENTUM)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
class HighResolutionModule(nn.Module):
def __init__(self, num_branches, blocks, num_blocks, num_inchannels,
num_channels, fuse_method, multi_scale_output=True):
super(HighResolutionModule, self).__init__()
self._check_branches(
num_branches, blocks, num_blocks, num_inchannels, num_channels)
self.num_inchannels = num_inchannels
self.fuse_method = fuse_method
self.num_branches = num_branches
self.multi_scale_output = multi_scale_output
self.branches = self._make_branches(
num_branches, blocks, num_blocks, num_channels)
self.fuse_layers = self._make_fuse_layers()
self.relu = nn.ReLU(False)
def _check_branches(self, num_branches, blocks, num_blocks,
num_inchannels, num_channels):
if num_branches != len(num_blocks):
error_msg = 'NUM_BRANCHES({}) <> NUM_BLOCKS({})'.format(
num_branches, len(num_blocks))
logger.error(error_msg)
raise ValueError(error_msg)
if num_branches != len(num_channels):
error_msg = 'NUM_BRANCHES({}) <> NUM_CHANNELS({})'.format(
num_branches, len(num_channels))
logger.error(error_msg)
raise ValueError(error_msg)
if num_branches != len(num_inchannels):
error_msg = 'NUM_BRANCHES({}) <> NUM_INCHANNELS({})'.format(
num_branches, len(num_inchannels))
logger.error(error_msg)
raise ValueError(error_msg)
def _make_one_branch(self, branch_index, block, num_blocks, num_channels,
stride=1):
downsample = None
if stride != 1 or \
self.num_inchannels[branch_index] != num_channels[branch_index] * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.num_inchannels[branch_index],
num_channels[branch_index] * block.expansion,
kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(num_channels[branch_index] * block.expansion,
momentum=BN_MOMENTUM),
)
layers = []
layers.append(block(self.num_inchannels[branch_index],
num_channels[branch_index], stride, downsample))
self.num_inchannels[branch_index] = \
num_channels[branch_index] * block.expansion
for i in range(1, num_blocks[branch_index]):
layers.append(block(self.num_inchannels[branch_index],
num_channels[branch_index]))
return nn.Sequential(*layers)
def _make_branches(self, num_branches, block, num_blocks, num_channels):
branches = []
for i in range(num_branches):
branches.append(
self._make_one_branch(i, block, num_blocks, num_channels))
return nn.ModuleList(branches)
def _make_fuse_layers(self):
if self.num_branches == 1:
return None
num_branches = self.num_branches
num_inchannels = self.num_inchannels
fuse_layers = []
for i in range(num_branches if self.multi_scale_output else 1):
fuse_layer = []
for j in range(num_branches):
if j > i:
fuse_layer.append(nn.Sequential(
nn.Conv2d(num_inchannels[j],
num_inchannels[i],
1,
1,
0,
bias=False),
nn.BatchNorm2d(num_inchannels[i],
momentum=BN_MOMENTUM),
nn.Upsample(scale_factor=2 ** (j - i), mode='nearest')))
elif j == i:
fuse_layer.append(None)
else:
conv3x3s = []
for k in range(i - j):
if k == i - j - 1:
num_outchannels_conv3x3 = num_inchannels[i]
conv3x3s.append(nn.Sequential(
nn.Conv2d(num_inchannels[j],
num_outchannels_conv3x3,
3, 2, 1, bias=False),
nn.BatchNorm2d(num_outchannels_conv3x3,
momentum=BN_MOMENTUM)))
else:
num_outchannels_conv3x3 = num_inchannels[j]
conv3x3s.append(nn.Sequential(
nn.Conv2d(num_inchannels[j],
num_outchannels_conv3x3,
3, 2, 1, bias=False),
nn.BatchNorm2d(num_outchannels_conv3x3,
momentum=BN_MOMENTUM),
nn.ReLU(False)))
fuse_layer.append(nn.Sequential(*conv3x3s))
fuse_layers.append(nn.ModuleList(fuse_layer))
return nn.ModuleList(fuse_layers)
def get_num_inchannels(self):
return self.num_inchannels
def forward(self, x):
if self.num_branches == 1:
return [self.branches[0](x[0])]
for i in range(self.num_branches):
x[i] = self.branches[i](x[i])
x_fuse = []
for i in range(len(self.fuse_layers)):
y = x[0] if i == 0 else self.fuse_layers[i][0](x[0])
for j in range(1, self.num_branches):
if i == j:
y = y + x[j]
else:
y = y + self.fuse_layers[i][j](x[j])
x_fuse.append(self.relu(y))
return x_fuse
blocks_dict = {
'BASIC': BasicBlock,
'BOTTLENECK': Bottleneck
}
class HighResolutionNet(nn.Module):
def __init__(self, cfg, **kwargs):
super(HighResolutionNet, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=3, stride=2, padding=1,
bias=False)
self.bn1 = nn.BatchNorm2d(64, momentum=BN_MOMENTUM)
self.conv2 = nn.Conv2d(64, 64, kernel_size=3, stride=2, padding=1,
bias=False)
self.bn2 = nn.BatchNorm2d(64, momentum=BN_MOMENTUM)
self.relu = nn.ReLU(inplace=True)
print(cfg)
self.stage1_cfg = cfg['MODEL']['EXTRA']['STAGE1']
num_channels = self.stage1_cfg['NUM_CHANNELS'][0]
block = blocks_dict[self.stage1_cfg['BLOCK']]
num_blocks = self.stage1_cfg['NUM_BLOCKS'][0]
self.layer1 = self._make_layer(block, 64, num_channels, num_blocks)
stage1_out_channel = block.expansion * num_channels
self.stage2_cfg = cfg['MODEL']['EXTRA']['STAGE2']
num_channels = self.stage2_cfg['NUM_CHANNELS']
block = blocks_dict[self.stage2_cfg['BLOCK']]
num_channels = [
num_channels[i] * block.expansion for i in range(len(num_channels))]
self.transition1 = self._make_transition_layer(
[stage1_out_channel], num_channels)
self.stage2, pre_stage_channels = self._make_stage(
self.stage2_cfg, num_channels)
self.stage3_cfg = cfg['MODEL']['EXTRA']['STAGE3']
num_channels = self.stage3_cfg['NUM_CHANNELS']
block = blocks_dict[self.stage3_cfg['BLOCK']]
num_channels = [
num_channels[i] * block.expansion for i in range(len(num_channels))]
self.transition2 = self._make_transition_layer(
pre_stage_channels, num_channels)
self.stage3, pre_stage_channels = self._make_stage(
self.stage3_cfg, num_channels)
self.stage4_cfg = cfg['MODEL']['EXTRA']['STAGE4']
num_channels = self.stage4_cfg['NUM_CHANNELS']
block = blocks_dict[self.stage4_cfg['BLOCK']]
num_channels = [
num_channels[i] * block.expansion for i in range(len(num_channels))]
self.transition3 = self._make_transition_layer(
pre_stage_channels, num_channels)
self.stage4, pre_stage_channels = self._make_stage(
self.stage4_cfg, num_channels, multi_scale_output=True)
# Classification Head
self.incre_modules, self.downsamp_modules, \
self.final_layer = self._make_head(pre_stage_channels)
self.classifier = nn.Linear(2048, 1000)
def _make_head(self, pre_stage_channels):
head_block = Bottleneck
head_channels = [32, 64, 128, 256]
# Increasing the #channels on each resolution
# from C, 2C, 4C, 8C to 128, 256, 512, 1024
incre_modules = []
for i, channels in enumerate(pre_stage_channels):
incre_module = self._make_layer(head_block,
channels,
head_channels[i],
1,
stride=1)
incre_modules.append(incre_module)
incre_modules = nn.ModuleList(incre_modules)
# downsampling modules
downsamp_modules = []
for i in range(len(pre_stage_channels) - 1):
in_channels = head_channels[i] * head_block.expansion
out_channels = head_channels[i + 1] * head_block.expansion
downsamp_module = nn.Sequential(
nn.Conv2d(in_channels=in_channels,
out_channels=out_channels,
kernel_size=3,
stride=2,
padding=1),
nn.BatchNorm2d(out_channels, momentum=BN_MOMENTUM),
nn.ReLU(inplace=True)
)
downsamp_modules.append(downsamp_module)
downsamp_modules = nn.ModuleList(downsamp_modules)
final_layer = nn.Sequential(
nn.Conv2d(
in_channels=head_channels[3] * head_block.expansion,
out_channels=2048,
kernel_size=1,
stride=1,
padding=0
),
nn.BatchNorm2d(2048, momentum=BN_MOMENTUM),
nn.ReLU(inplace=True)
)
return incre_modules, downsamp_modules, final_layer
def _make_transition_layer(
self, num_channels_pre_layer, num_channels_cur_layer):
num_branches_cur = len(num_channels_cur_layer)
num_branches_pre = len(num_channels_pre_layer)
transition_layers = []
for i in range(num_branches_cur):
if i < num_branches_pre:
if num_channels_cur_layer[i] != num_channels_pre_layer[i]:
transition_layers.append(nn.Sequential(
nn.Conv2d(num_channels_pre_layer[i],
num_channels_cur_layer[i],
3,
1,
1,
bias=False),
nn.BatchNorm2d(
num_channels_cur_layer[i], momentum=BN_MOMENTUM),
nn.ReLU(inplace=True)))
else:
transition_layers.append(None)
else:
conv3x3s = []
for j in range(i + 1 - num_branches_pre):
inchannels = num_channels_pre_layer[-1]
outchannels = num_channels_cur_layer[i] \
if j == i - num_branches_pre else inchannels
conv3x3s.append(nn.Sequential(
nn.Conv2d(
inchannels, outchannels, 3, 2, 1, bias=False),
nn.BatchNorm2d(outchannels, momentum=BN_MOMENTUM),
nn.ReLU(inplace=True)))
transition_layers.append(nn.Sequential(*conv3x3s))
return nn.ModuleList(transition_layers)
def _make_layer(self, block, inplanes, planes, blocks, stride=1):
downsample = None
if stride != 1 or inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(inplanes, planes * block.expansion,
kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(planes * block.expansion, momentum=BN_MOMENTUM),
)
layers = []
layers.append(block(inplanes, planes, stride, downsample))
inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(inplanes, planes))
return nn.Sequential(*layers)
def _make_stage(self, layer_config, num_inchannels,
multi_scale_output=True):
num_modules = layer_config['NUM_MODULES']
num_branches = layer_config['NUM_BRANCHES']
num_blocks = layer_config['NUM_BLOCKS']
num_channels = layer_config['NUM_CHANNELS']
block = blocks_dict[layer_config['BLOCK']]
fuse_method = layer_config['FUSE_METHOD']
modules = []
for i in range(num_modules):
# multi_scale_output is only used last module
if not multi_scale_output and i == num_modules - 1:
reset_multi_scale_output = False
else:
reset_multi_scale_output = True
modules.append(
HighResolutionModule(num_branches,
block,
num_blocks,
num_inchannels,
num_channels,
fuse_method,
reset_multi_scale_output)
)
num_inchannels = modules[-1].get_num_inchannels()
return nn.Sequential(*modules), num_inchannels
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.conv2(x)
x = self.bn2(x)
x = self.relu(x)
x = self.layer1(x)
x_list = []
for i in range(self.stage2_cfg['NUM_BRANCHES']):
if self.transition1[i] is not None:
x_list.append(self.transition1[i](x))
else:
x_list.append(x)
y_list = self.stage2(x_list)
x_list = []
for i in range(self.stage3_cfg['NUM_BRANCHES']):
if self.transition2[i] is not None:
x_list.append(self.transition2[i](y_list[-1]))
else:
x_list.append(y_list[i])
y_list = self.stage3(x_list)
x_list = []
for i in range(self.stage4_cfg['NUM_BRANCHES']):
if self.transition3[i] is not None:
x_list.append(self.transition3[i](y_list[-1]))
else:
x_list.append(y_list[i])
y_list = self.stage4(x_list)
# Classification Head
y = self.incre_modules[0](y_list[0])
for i in range(len(self.downsamp_modules)):
y = self.incre_modules[i + 1](y_list[i + 1]) + \
self.downsamp_modules[i](y)
y = self.final_layer(y)
if torch._C._get_tracing_state():
y = y.flatten(start_dim=2).mean(dim=2)
else:
y = F.avg_pool2d(y, kernel_size=y.size()
[2:]).view(y.size(0), -1)
y = self.classifier(y)
return y
def init_weights(self, pretrained='', ):
logger.info('=> init weights from normal distribution')
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(
m.weight, mode='fan_out', nonlinearity='relu')
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
if os.path.isfile(pretrained):
pretrained_dict = torch.load(pretrained)
logger.info('=> loading pretrained model {}'.format(pretrained))
model_dict = self.state_dict()
pretrained_dict = {k: v for k, v in pretrained_dict.items()
if k in model_dict.keys()}
for k, _ in pretrained_dict.items():
logger.info(
'=> loading {} pretrained model {}'.format(k, pretrained))
model_dict.update(pretrained_dict)
self.load_state_dict(model_dict)
def get_cls_net(config, **kwargs):
model = HighResolutionNet(config, **kwargs)
model.init_weights()
return model
model = HighResolutionNet(config)
print(model)
HighResolutionNet(
(conv1): Conv2d(3, 64, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(layer1): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(3): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(transition1): ModuleList(
(0): Sequential(
(0): Conv2d(64, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(1): Sequential(
(0): Sequential(
(0): Conv2d(64, 64, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
)
)
(stage2): Sequential(
(0): HighResolutionModule(
(branches): ModuleList(
(0): Sequential(
(0): BasicBlock(
(conv1): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicBlock(
(conv1): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): BasicBlock(
(conv1): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(3): BasicBlock(
(conv1): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(3): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
)
(fuse_layers): ModuleList(
(0): ModuleList(
(0): None
(1): Sequential(
(0): Conv2d(64, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Upsample(scale_factor=2.0, mode=nearest)
)
)
(1): ModuleList(
(0): Sequential(
(0): Sequential(
(0): Conv2d(32, 64, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): None
)
)
(relu): ReLU()
)
)
(transition2): ModuleList(
(0): None
(1): None
(2): Sequential(
(0): Sequential(
(0): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
)
)
(stage3): Sequential(
(0): HighResolutionModule(
(branches): ModuleList(
(0): Sequential(
(0): BasicBlock(
(conv1): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicBlock(
(conv1): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): BasicBlock(
(conv1): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(3): BasicBlock(
(conv1): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(3): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(2): Sequential(
(0): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(3): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
)
(fuse_layers): ModuleList(
(0): ModuleList(
(0): None
(1): Sequential(
(0): Conv2d(64, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Upsample(scale_factor=2.0, mode=nearest)
)
(2): Sequential(
(0): Conv2d(128, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Upsample(scale_factor=4.0, mode=nearest)
)
)
(1): ModuleList(
(0): Sequential(
(0): Sequential(
(0): Conv2d(32, 64, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): None
(2): Sequential(
(0): Conv2d(128, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Upsample(scale_factor=2.0, mode=nearest)
)
)
(2): ModuleList(
(0): Sequential(
(0): Sequential(
(0): Conv2d(32, 32, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
)
(1): Sequential(
(0): Conv2d(32, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Sequential(
(0): Sequential(
(0): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(2): None
)
)
(relu): ReLU()
)
)
(transition3): ModuleList(
(0): None
(1): None
(2): None
(3): Sequential(
(0): Sequential(
(0): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
)
)
(stage4): Sequential(
(0): HighResolutionModule(
(branches): ModuleList(
(0): Sequential(
(0): BasicBlock(
(conv1): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicBlock(
(conv1): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): BasicBlock(
(conv1): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(3): BasicBlock(
(conv1): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(3): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(2): Sequential(
(0): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(3): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(3): Sequential(
(0): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(3): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
)
(fuse_layers): ModuleList(
(0): ModuleList(
(0): None
(1): Sequential(
(0): Conv2d(64, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Upsample(scale_factor=2.0, mode=nearest)
)
(2): Sequential(
(0): Conv2d(128, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Upsample(scale_factor=4.0, mode=nearest)
)
(3): Sequential(
(0): Conv2d(256, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Upsample(scale_factor=8.0, mode=nearest)
)
)
(1): ModuleList(
(0): Sequential(
(0): Sequential(
(0): Conv2d(32, 64, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): None
(2): Sequential(
(0): Conv2d(128, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Upsample(scale_factor=2.0, mode=nearest)
)
(3): Sequential(
(0): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Upsample(scale_factor=4.0, mode=nearest)
)
)
(2): ModuleList(
(0): Sequential(
(0): Sequential(
(0): Conv2d(32, 32, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
)
(1): Sequential(
(0): Conv2d(32, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Sequential(
(0): Sequential(
(0): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(2): None
(3): Sequential(
(0): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Upsample(scale_factor=2.0, mode=nearest)
)
)
(3): ModuleList(
(0): Sequential(
(0): Sequential(
(0): Conv2d(32, 32, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
)
(1): Sequential(
(0): Conv2d(32, 32, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
)
(2): Sequential(
(0): Conv2d(32, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Sequential(
(0): Sequential(
(0): Conv2d(64, 64, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
)
(1): Sequential(
(0): Conv2d(64, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(2): Sequential(
(0): Sequential(
(0): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(3): None
)
)
(relu): ReLU()
)
)
(incre_modules): ModuleList(
(0): Sequential(
(0): Bottleneck(
(conv1): Conv2d(32, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(32, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(32, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
)
(1): Sequential(
(0): Bottleneck(
(conv1): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
)
(2): Sequential(
(0): Bottleneck(
(conv1): Conv2d(128, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
)
(3): Sequential(
(0): Bottleneck(
(conv1): Conv2d(256, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
)
)
(downsamp_modules): ModuleList(
(0): Sequential(
(0): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(1): Sequential(
(0): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(2): Sequential(
(0): Conv2d(512, 1024, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(1): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
)
(final_layer): Sequential(
(0): Conv2d(1024, 2048, kernel_size=(1, 1), stride=(1, 1))
(1): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(classifier): Linear(in_features=2048, out_features=1000, bias=True)
)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









