







 本文详细介绍了KMeans聚类算法及其在Anchor机制中的应用。KMeans算法是一种基于距离的聚类方法,用于将对象划分为多个簇。文章还探讨了Anchor机制在目标检测中的作用,包括Anchor的计算方法及在YOLO系列模型中的应用。
本文详细介绍了KMeans聚类算法及其在Anchor机制中的应用。KMeans算法是一种基于距离的聚类方法,用于将对象划分为多个簇。文章还探讨了Anchor机制在目标检测中的作用,包括Anchor的计算方法及在YOLO系列模型中的应用。
- 前言:最近在学习anchor,下面是一些记录。
1、Kmeans算法
1.1 Kmeans理解
K-means算法是很典型的基于距离的聚类算法,采用距离作为相似性的评价指标,即认为两个对象的距离越近,其相似度就越大。该算法认为簇是由距离靠近的对象组成的,因此把得到紧凑且独立的簇作为最终目标。
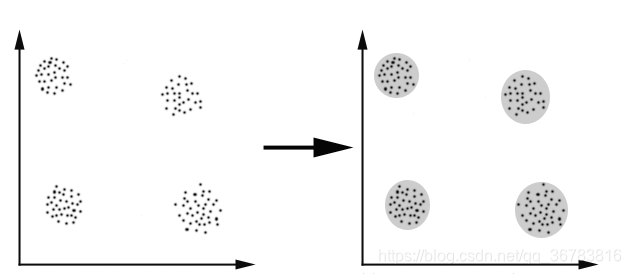
K-Means算法主要解决的问题如下图所示。我们可以看到,在图的左边有一些点,我们用肉眼可以看出来有四个点群,K-Means算法被用来找出这几个点群。
1.2 Kmeans原理
假定给定数据样本 X X X,包含了 n n n个对象 X = { X 1 , X 2 , X 3 , . . . , X n } X=\left \{ X_{1},X_{2},X_{3},...,X_{n} \right \} X={X1,X2,X3,...,Xn},其中每个对象都具有 m m m个维度的属性。Kmeans算法的目标是将 n n n个对象依据对象间的相似性聚集到指定的 k k k个类簇中,每个对象属于且仅属于一个其到类簇中心距离最小的类簇中。对于Kmeans,首先需要初始化 k k k个聚类中心 { C 1 , C 2 , C 3 , . . . , C k } , 1 < k < = n \left \{ C_{1},C_{2},C_{3},...,C_{k} \right \},1<k<=n {C1,C2,C3,...,Ck},1<k<=n,然后通过计算每一个对象到每一个聚类中心的欧式距离,如下式所示:
d i s ( X i , C i ) = ∑ t = 1 m ( X i t − C i t ) 2 dis(X_{i},C_{i})=\sqrt{\sum_{t=1}^{m}(X_{it}-C_{it})^{2}} dis(Xi,Ci)=∑t=1m(Xit−Cit)2
上式中,
X
i
X_{i}
Xi表示第
i
i
i个对象
1
≤
i
≤
n
1\leq i\leq n
1≤i≤n,
C
j
C_{j}
Cj表示第
j
j
j个聚类中心的
1
⩽
j
≤
k
,
X
i
t
1\leqslant j\leq k,X_{it}
1⩽j≤k,Xit表示第
i
i
i个对象的第
t
t
t个属性,
1
⩽
t
≤
m
,
C
j
t
1\leqslant t\leq m,C_{jt}
1⩽t≤m,Cjt表示第
j
j
j个聚类中心的第
t
t
t个属性。
依次比较每一个对象到每一个聚类中心的距离,将对象分配到距离最近的聚类中心的类簇中,得到
k
k
k个类簇
{
S
1
,
S
2
,
S
3
,
.
.
.
,
S
k
,
}
\left \{ S_{1},S_{2},S_{3},...,S_{k}, \right \}
{S1,S2,S3,...,Sk,}。
Kmeans算法用中心定义了类簇的原型,类簇中心就是类簇内所有对象在各个维度的均值,其计算公式如下
式中,
C
l
C_{l}
Cl表示第
l
l
l个聚类的中心,
1
≤
l
≤
k
1\leq l\leq k
1≤l≤k,
∣
S
l
∣
\left | S_{l} \right |
∣Sl∣表示第
l
l
l个类簇中对象的个数,
X
i
X_{i}
Xi表示第
l
l
l个类簇中第
i
i
i个对象,
1
≤
i
≤
∣
S
l
∣
1\leq i\leq \left | S_{l} \right |
1≤i≤∣Sl∣。
例如:
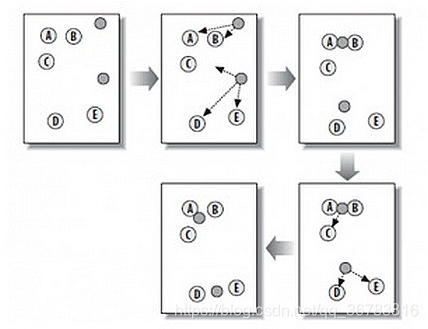
从上图中,我们可以看到,A, B, C, D, E 是五个在图中点。而灰色的点是我们的种子点,也就是我们用来找点群的点。有两个种子点,所以K=2。
K-Means的算法如下:
1). 随机在图中取K(这里K=2)个种子点。
2). 然后对图中的所有点求到这K个种子点的距离,假如点Pi离种子点Si最近,那么Pi属于Si点群。(上图中,我们可以看到A,B属于上面的种子点,C,D,E属于下面的种子点)
3). 接下来,我们要移动种子点到属于他的“点群”的中心。(见图上的第三步)
4). 然后重复第2)和第3)步,直到种子点没有移动(我们可以看到图中的第四步上面的种子点聚合了A,B,C,下面的种子点聚合了D,E)。
缺点:
需要提前指定k;
对种子点的初始化非常敏感。
2、Anchor机制
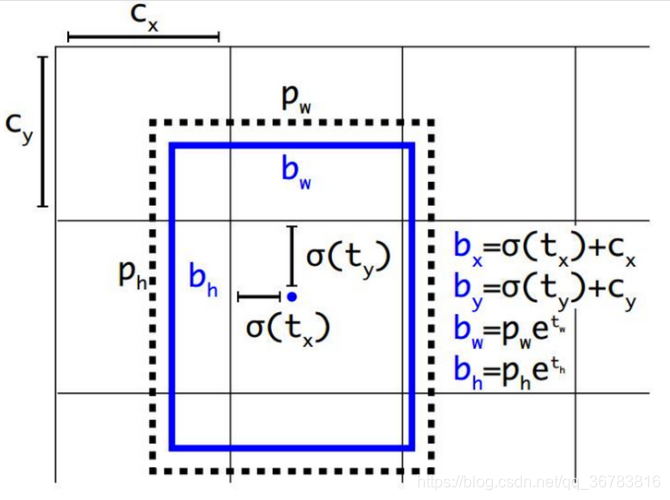
网络实际的预测值为tx、ty、tw、th,根据上图中的四个公式计算得到预测框的中心点坐标和宽高bx、by、bw、bh。其中,cx、cy为当前grid相对于左上角grid偏移的grid数量。σ()函数为logistic函数,将坐标归一化到0-1。最终得到的bx,by为归一化后的相对于grid cell的值。pw、 ph为与ground truth重合度最大的anchor的宽和高。实际使用中,作者为了将bw,bh也归一化到0-1,程序中的 pw,ph为anchor的宽、高和feature map的宽、高的比值。最终得到的bw,bh为归一化后相对于anchor的值。
3、Anchor计算
YOLOV3的默认 anchor box 尺寸是基于COCO训练集,使用 k-means 聚类算法获得的。
聚类的目的是anchor boxes和临近的ground truth有更大的IOU,因为使用欧氏距离会让大的bounding boxes比小的bounding boxes产生更多的error,而我们希望能通过anchor boxes获得好的IOU scores,并且IOU scores是与box的尺寸无关的。
为此作者定义了新的距离公式:
d(box,centroid)=1-IOU(box,centroid)
这样就保证距离越小,IOU值越大。
计算过程:
a. 使用的聚类原始数据是只有标注框的检测数据集,YOLOv2、v3都会生成一个包含标注框位置和类别的 txt 文件,其中每行都包含
(
x
j
,
y
j
,
w
j
,
h
j
)
,
j
∈
{
1
,
2
,
.
.
.
,
N
}
(x_j,y_j,w_j,h_j),j\in\{1,2,...,N\}
(xj,yj,wj,hj),j∈{1,2,...,N},即ground truth boxes相对于原图的坐标,
(
x
j
,
y
j
)
(x_j,y_j)
(xj,yj)是框的中心点,
(
w
j
,
h
j
)
(w_j,h_j)
(wj,hj)是框的宽和高,
N
N
N是所有标注框的个数;
b. 首先给定
k
k
k个聚类中心点
(
W
i
,
H
i
)
,
i
∈
{
1
,
2
,
.
.
.
,
k
}
(W_i,H_i),i\in\{1,2,...,k\}
(Wi,Hi),i∈{1,2,...,k},这里的
W
i
,
H
i
W_i,H_i
Wi,Hi是anchor boxes的宽和高尺寸,由于anchor boxes位置不固定,所以没有
(
x
,
y
)
(x,y)
(x,y)的坐标,只有宽和高;
c. 计算每个标注框和每个聚类中心点的距离d=1-IOU(标注框,聚类中心),计算时每个标注框的中心点都与聚类中心重合,这样才能计算IOU值,即
d
=
1
−
I
O
U
[
(
x
j
,
y
j
,
w
j
,
h
j
)
,
(
x
j
,
y
j
,
W
i
,
H
i
)
]
d=1-IOU\left [ (x_j,y_j,w_j,h_j),(x_j,y_j,W_i,H_i) \right ]
d=1−IOU[(xj,yj,wj,hj),(xj,yj,Wi,Hi)],
j
∈
{
1
,
2
,
.
.
.
,
N
}
,
i
∈
{
1
,
2
,
.
.
.
,
k
}
j\in\{1,2,...,N\},i\in\{1,2,...,k\}
j∈{1,2,...,N},i∈{1,2,...,k},
将标注框分配给“距离”最近的聚类中心;
d. 所有标注框分配完毕以后,对每个簇重新计算聚类中心点,计算方式为
W
i
′
=
1
N
i
∑
w
i
,
H
i
′
=
1
N
i
∑
h
i
,
N
i
W_i^{'}=\frac{1}{N_i}\sum w_{i},H_i^{'}=\frac{1}{N_i}\sum h_{i},N_i
Wi′=Ni1∑wi,Hi′=Ni1∑hi,Ni是第i个簇的标注框个数,就是求该簇中所有标注框的宽和高的平均值。重复第c、d,直到聚类中心改变量很小。
为什么YOLOv2和YOLOv3的anchor大小有明显区别?
如下是作者自己的解释:
So YOLOv2 I made some design choice errors, I made the anchor box size be relative to the feature size in the last layer. Since the network was down-sampling by 32. This means it was relative to 32 pixels so an anchor of 9x9 was actually 288px x 288px.
In YOLOv3 anchor sizes are actual pixel values. this simplifies a lot of stuff and was only a little bit harder to implement
https://github.com/pjreddie/darknet/issues/555#issuecomment-376190325
./darknet detector calc_anchors data/obj.data -num_of_clusters 9 -width 416 -height 416
python AlexeyAB/darknet/scripts/gen_anchors.py
4、背景知识
anchor先是出现在Faster R-CNN,然后yolov2中折中选取5个anchor,yolov3采用9个anchor,提高了IOU。
转自:
https://blog.youkuaiyun.com/as472780551/article/details/81227408
https://blog.youkuaiyun.com/gzq0723/article/details/88216020
https://blog.youkuaiyun.com/qq_32892383/article/details/80107795
https://blog.youkuaiyun.com/shiheyingzhe/article/details/83995213
https://blog.youkuaiyun.com/hrsstudy/article/details/71173305?utm_source=itdadao&utm_medium=referral
https://blog.youkuaiyun.com/tigerda/article/details/86736811
https://blog.youkuaiyun.com/weixin_42880443/article/details/81953158
https://blog.youkuaiyun.com/m_buddy/article/details/82926024
https://blog.youkuaiyun.com/weixin_43859829/article/details/92834468
https://blog.youkuaiyun.com/z5217632/article/details/84073031

















 8万+
8万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









