







 本文探讨了点云配准中的3D局部特征描述方法,提出了一种学习方法,通过hand-crafted 3D local feature descriptor作为神经网络输入,输出learning-based 3D local feature descriptor。网络结构包含5层全连接网络,实现非线性降维,优化目标是使点云匹配更精确。实验结果显示在网络降维后的欧几里得空间中,点云匹配的准确性和效率都有显著提升。
本文探讨了点云配准中的3D局部特征描述方法,提出了一种学习方法,通过hand-crafted 3D local feature descriptor作为神经网络输入,输出learning-based 3D local feature descriptor。网络结构包含5层全连接网络,实现非线性降维,优化目标是使点云匹配更精确。实验结果显示在网络降维后的欧几里得空间中,点云匹配的准确性和效率都有显著提升。
论文地址: Learning Compact Geometric Features
概述
这篇文章是点云配准领域的一篇文章,点云匹配过程中,两个模型必然存在一定程度上的旋转或平移,在三维参考平面内,每个点的相对坐标都发生了变化,但点与点之间的相对位置没有发生变化,因此,得到每个点附近的点的特征是很有意义的。
为了解决3D局部特征描述的方法,提出了一种独特的学习特征的方法,其中这些特征代表了非结构化点云中某个点上的局部几何;学习的过程则是设计了一种hand-crafted 3D local feature descriptor,将其作为网络的输入,网络的输出则为learning-based 3D local feature descriptor。
描述符
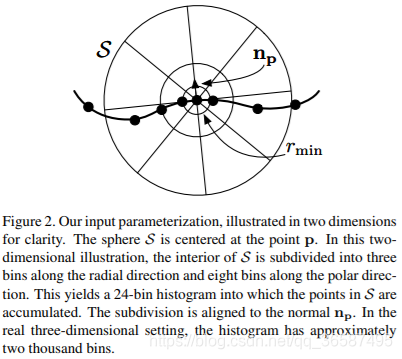
Figure 2是hand-crafted descriptor的结构,以此作为网络的输入,hand-crafted descriptor采用local reference frame(LRF)来实现旋转不变性,LRF中使用SHOT
这样的descripror将某一个点附近的球形空间按照方位角、仰角、径向方向三个维度划分成一个个格子,设计出了一种几何信息直方图。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











