




 在ArcGIS中同时加载多个图层时,可能因坐标系不同导致部分图层显示不出。本文介绍更改坐标系的方法,包括更改整个ArcMap平台的坐标,在内容列表中通过图层右键操作;以及更改单个图层的坐标,利用工具盒中的定义投影功能。
在ArcGIS中同时加载多个图层时,可能因坐标系不同导致部分图层显示不出。本文介绍更改坐标系的方法,包括更改整个ArcMap平台的坐标,在内容列表中通过图层右键操作;以及更改单个图层的坐标,利用工具盒中的定义投影功能。
在arcgis中若同时加载多个图层时,经常会发现有的图层显示不出来。在右键点击缩放至图层时会发现图层本身并没有问题,只是和其他图层没有显示在一起,这种情况可以考虑是否是坐标系不同导致的。
下面写一下更改坐标系的方法。分两种:
(一)更改整个arcmap平台的坐标
(二)更改单个图层的坐标
(一)更改整个arcmap平台的坐标
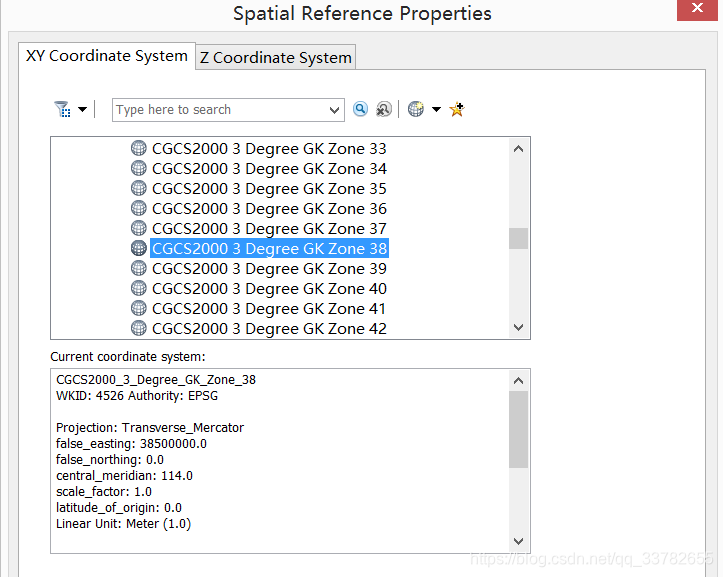
将该坐标改为指定坐标系
在内容列表中,图层右键->属性-》坐标系-》,,,然后根据需要更改即可。
(二)更改单个图层的坐标系
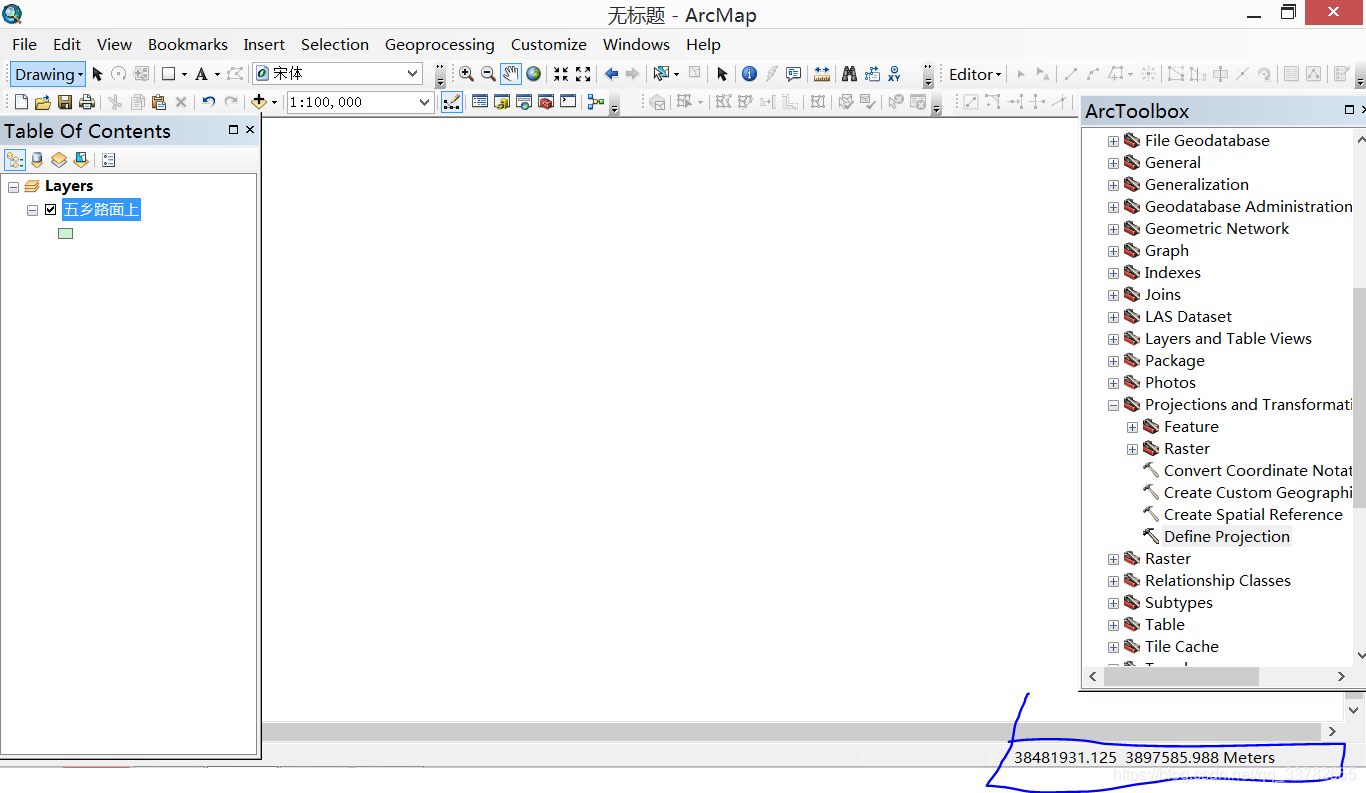
1.如下图所示,五乡路面图层和arcmap的坐标系不同,导致五乡路面图层显示不出来。
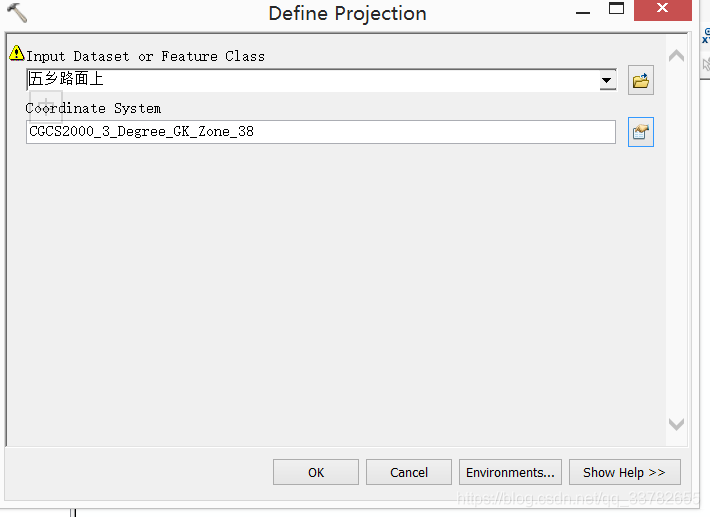
2.打开工具盒(ArcToolBox),-》数据管理工具-》投影和转换-》定义投影
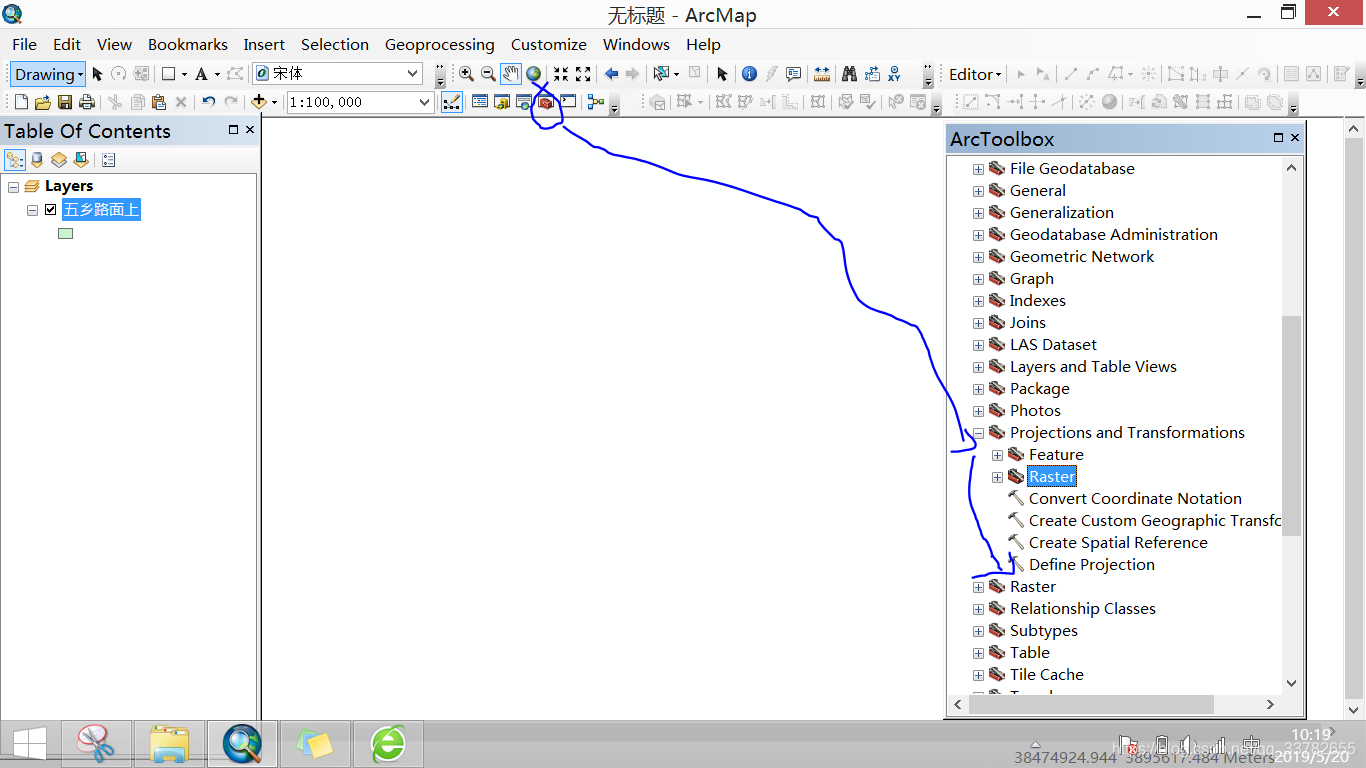
(2)双击打开定义投影,输入数据集或要素为要更改坐标系的东西,坐标系改为想要的坐标系,点击确定。
更改完后发现该图层已可正常显示。

















 2328
2328

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









