







硬件介绍:
STM32F4核心板。
DRV8313驱动版
云台电机。
资料参考
- 灯哥FOC
闭环位置控制
控制要求
要求,外部输入固定的电机位置值(0-2π),电机能够转动到该位置。并且,当手动转动电机到一定角度恢复时,电机能够回到设定的角度,从而实现闭环控制。
控制原理
在灯哥之前的分享中,我们知道了无刷电机BLDC驱动方式以及克拉克逆变换、帕克逆变换在FOC的数学模型等:
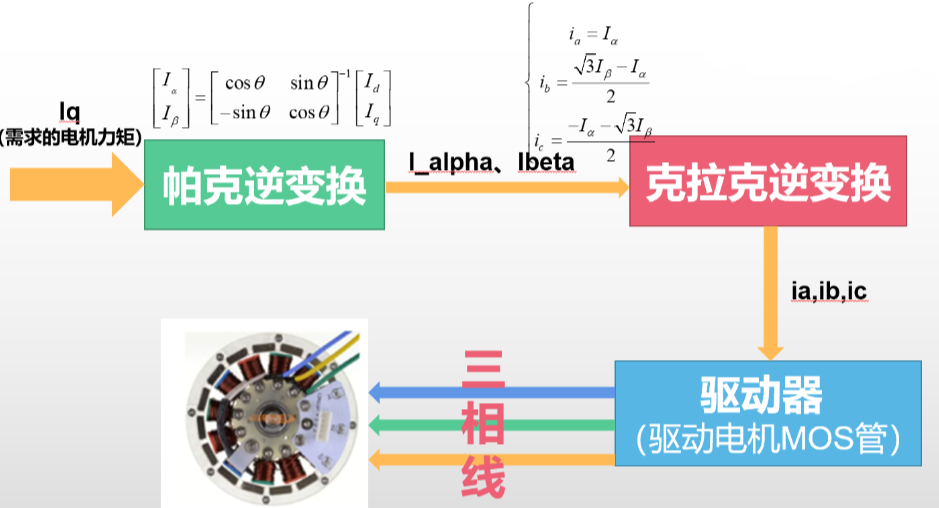
其中,克拉克变换不涉及到角度,但是在帕克变换中,需要涉及到角度θ。
这里需要注意一点,变换中的角度θ必须是转子角度的真实测量值(θ_real)。这是实现精确磁场控制(FOC)的基石,任何其他角度的输入都会破坏这一变化,导致不可预测的错误。
闭环控制流程:
- 设定目标: 你告诉系统一个期望位置角度 (θ_target)。例如:让转子转到30度的位置。
- 感知现实: 电机轴上的编码器(或旋变等位置传感器)实时测量转子实际位置角度 (θ_actual)。
- 计算偏差: 位置控制器(通常是PID控制器,尤其是P比例控制或PI比例积分控制)进行关键计算:
位置误差 = θ_target - θ_actual - 生成速度指令: 控制器将位置误差转换为速度指令 (ω_ref)。这是
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1283
1283

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









