




目标
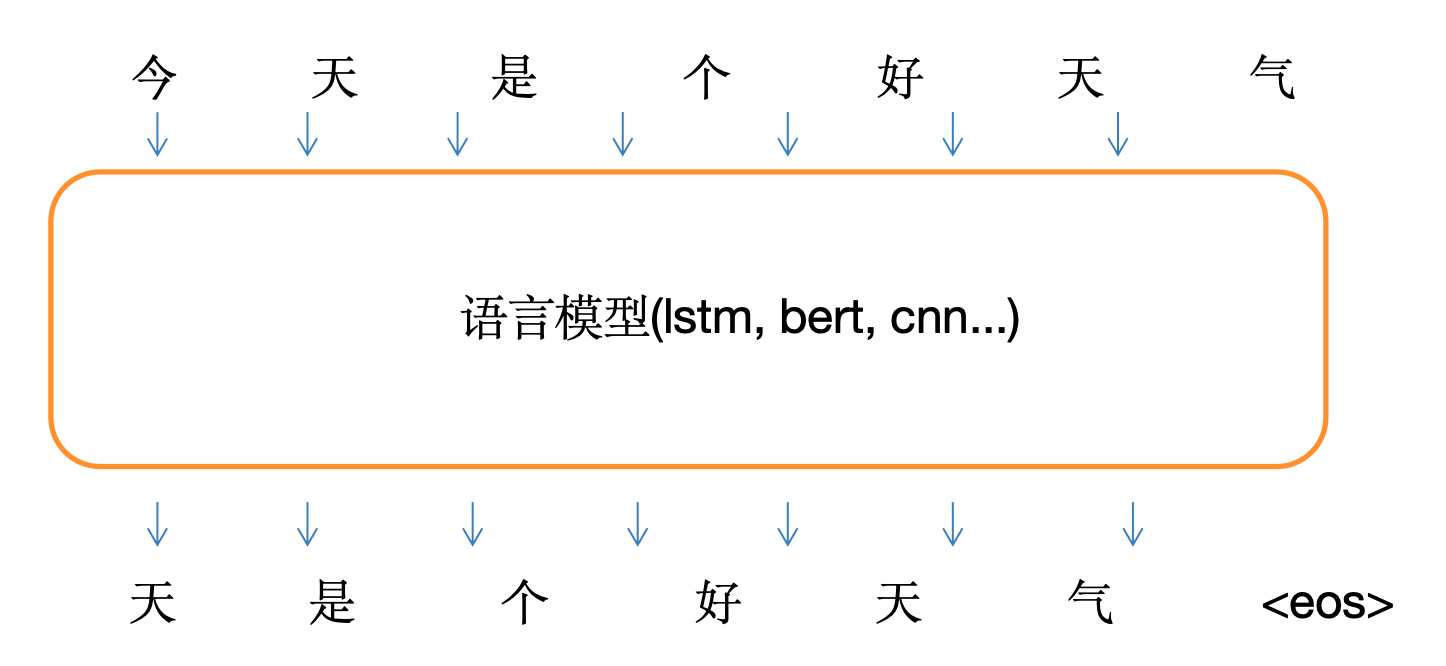
本文基于给定的词表,将输入的文本以字符分割为若干个词,然后基于词表将词初步序列化作为训练网络的输入序列,将词后面一个词在词表中的序号作为输入标签,取连续序列文本片段长度作为输入序列的长度。之后经过Embedding、LSTM等网络层。因为生成的词是词表中某个词,因此模型输出为已知词表上的多类别概率分布,从而实现一个简单文本的续写任务。
数据准备
词表文件vocab.txt
语料文件语料训练文件
程序说明
定义模型结构
class LanguageModel(nn.Module):
def __init__(self, input_dim, vocab):
super(LanguageModel, self).__init__()
self.embedding = nn.Embedding(len(vocab), input_dim)
self.layer = nn.LSTM(input_dim, input_dim, num_layers=1, batch_first=True)
self.classify = nn.Linear(input_dim, len(vocab))
self.dropout = nn.Dropout(0.1)
self.loss = nn.functional.cross_entropy
LanguageModel类继承自nn.Module,表示一个神经网络模型。self.embedding: 嵌入层,用于将每个单词映射到固定维度的向量空间。self.layer: LSTM 层,处理输入的序列数据。self.classify: 全连接层,用于将 LSTM 的输出映射到词表大小的输出空间,即词汇的预测概率分布。self.dropout: 丢弃层,避免过拟合。self.loss: 使用交叉熵损失函数来计算损失。
前向传播
def forward(self, x, y=None):
x = self.embedding(x)
x, _ = self.layer(x)
y_pred = self.classify(x)
if y is not None:
return self.loss(y_pred.view(-1, y_pred.shape[-1]), y.view(-1))
else:
return torch.softmax(y_pred, dim=-1)
- 输入
x是词的索引,首先通过嵌入层转换成向量表示。 x, _ = self.layer(x)通过 LSTM 层处理输入序列。- 然后通过
self.classify进行预测,得到每个词的概率分布。 - 如果有真实标签
y,则计算并返回损失;如果没有真实标签,则返回预测的概率分布。
构建词表
def build_vocab(vocab_path):
vocab = {
"<pad>": 0}
with open(vocab_path, encoding="utf8") as f:
for index, line in enumerate(f):
char = line[:-1]
vocab[char] = index + 1
return vocab
- 从给定的文件
vocab_path加载词表,词表是一个字典,每个字符对应一个唯一的索引。 - 词表中包含一个特殊的
<pad>标记,索引为0,用于填充。
加载语料
def load_corpus(path):
corpus = ""
with open(path, encoding="gbk") as f:
for line in f:
corpus += line.strip()
return corpus
- 从文件
path中加载语料,将每行的空格、换行符去掉,并将所有文本连接成一个长字符串。
构建训练样本
def build_sample(vocab, window_size, corpus):
start = random.randint(0, len(corpus) - 1 - window_size)
end = start + window_size
window = corpus[start:end]
target = corpus[start + 1:end + 1]
x = [vocab.get(word, vocab["<UNK>"]) for word in window]
y = [vocab.get(word, vocab["<UNK>"]) for word in target]
return x, y
- 从语料中随机选取一个窗口
window_size长度的子序列,并将其作为输入x和目标y(目标y是输入x向后移一位的序列)。 - 每个字符都被映射为词表中的索引。
构建数据集
def build_dataset(sample_length, vocab, window_size, corpus):
dataset_x = []
dataset_y = []
for i in range(sample_length):
x, y = build_sample(vocab, window_size, corpus)
dataset_x.append(x)
dataset_y.append(y)
return torch.LongTensor(dataset_x), torch.LongTensor(dataset_y)
- 根据需要的样本数量
sample_length生成训练数据集dataset_x和dataset_y。 - 每个样本是一个长度为
window_size的输入序列和一个对应的目标序列。
训练模型
def train(corpus_path, save_weight=True):
epoch_num = 10
batch_size = 64
train_sample = 50000
char_dim = 256
window_size = 10
vocab = build_vocab("vocab.txt")
corpus = load_corpus(corpus_path)
model = build_model(vocab, char_dim)
if torch.cuda.is_available():
model = model.cuda()
optim = torch.optim.Adam(model.parameters(), lr=0.01)
print("文本词表模型加载完毕,开始训练")
for epoch in range(epoch_num):
model.train()
watch_loss = []
for batch in range(int(train_sample / batch_size)):
x, y  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 217
217

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









