







 本文详细介绍了图的定义,包括完全有向图和无向图的概念,以及连通图和强连通图的特性。重点讲解了图的表示方法如邻接矩阵和邻接表,以及图的遍历策略如深度优先搜索和广度优先搜索。接着阐述了最小生成树的Kruskal和Prim算法,以及最短路径问题的Dijkstra、Bellman-Ford和Floyd算法。最后讨论了活动网络的AOV和AOE网络,包括拓扑排序和关键路径的确定。
本文详细介绍了图的定义,包括完全有向图和无向图的概念,以及连通图和强连通图的特性。重点讲解了图的表示方法如邻接矩阵和邻接表,以及图的遍历策略如深度优先搜索和广度优先搜索。接着阐述了最小生成树的Kruskal和Prim算法,以及最短路径问题的Dijkstra、Bellman-Ford和Floyd算法。最后讨论了活动网络的AOV和AOE网络,包括拓扑排序和关键路径的确定。
图
1. 定义
(1)完全有向图:n个定点的有向图有 n(n-1)条边。
(2)完全无向图:n个定点的无向图有 n(n-1)/2条边。
(3)简单路径:路径上各顶点互相不重复。
(4)连通图和连通分量:无向图中,任意一对定点都是连通的,则该图为连通图。非连通图中的极大连通子图为连通分量。
(5)强连通图和强连通分量:有向图中,任意一对定点都是双向连通的,则该图为强连通分量。非强连通图的极大强连通子图为强连通分量。
(6)生成树:连通图的极小连通子图,n个顶点,有n-1条边。
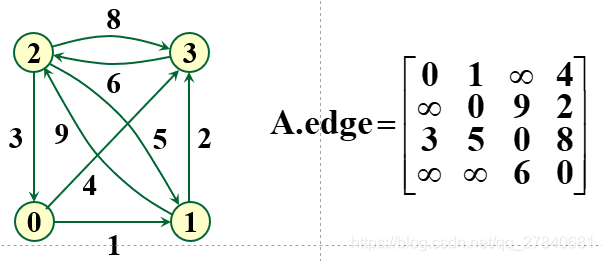
2. 图的表示
(1)邻接矩阵
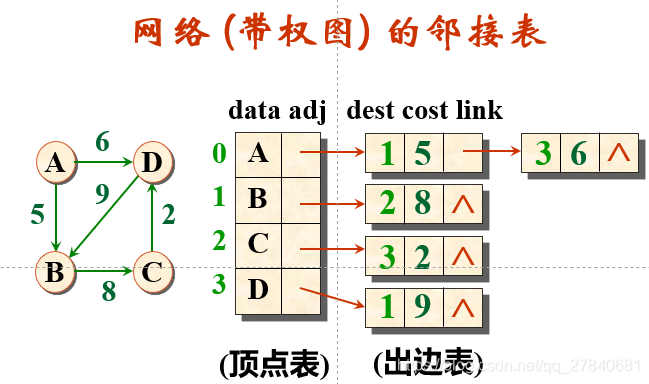
(2)邻接表:邻接矩阵的各行分别组织为一个单链表。
3. 图的遍历
从图的某一个顶点出发,沿着一些边访问图中的所有顶点,且每个顶点只被访问一次。
(1)深度优先搜索DFS
Node n = G.getFirstNode();
bool visited[v] = {false};
int d=0;
bool DFS(Node n, int d, bool visited[]) //从n开始搜索
{
if(isEnd(n, d)) return true; //搜索达到某种状态d,结束
for(Node nextNode in n)
{
if(!visited[nextNode])
{
visited[nextNode] = true;
if(DFS(nextNode, d+1)) return true;
}
visited[nextNode] = false;
}
return false;
}
(2)广度优先搜索BFS
用队列保存当前结点
4. 最小生成树
权值最小的生成树(极小连通图,n个点,n-1条边)。
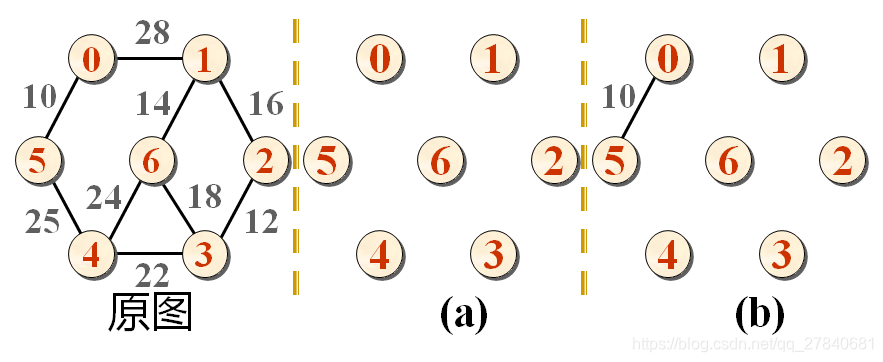
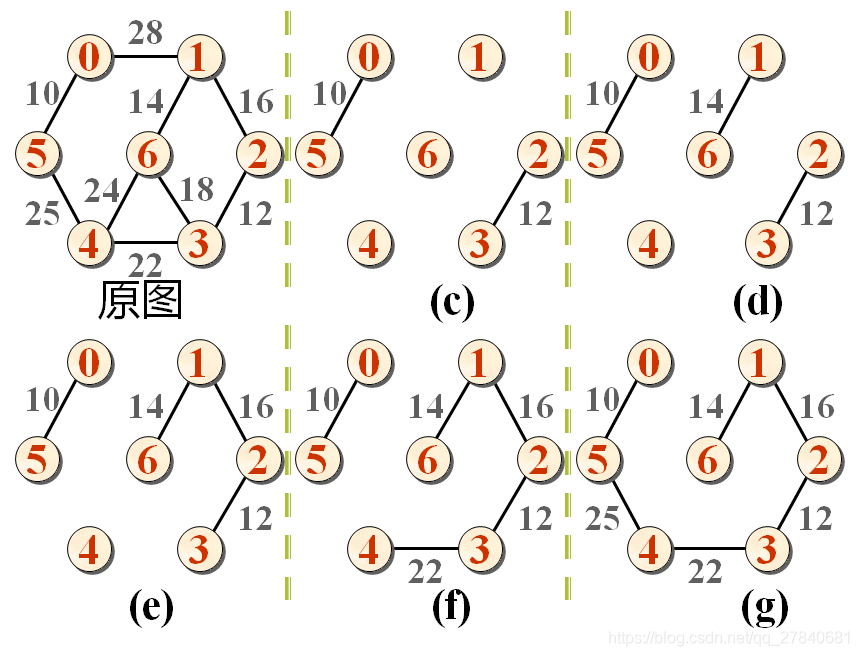
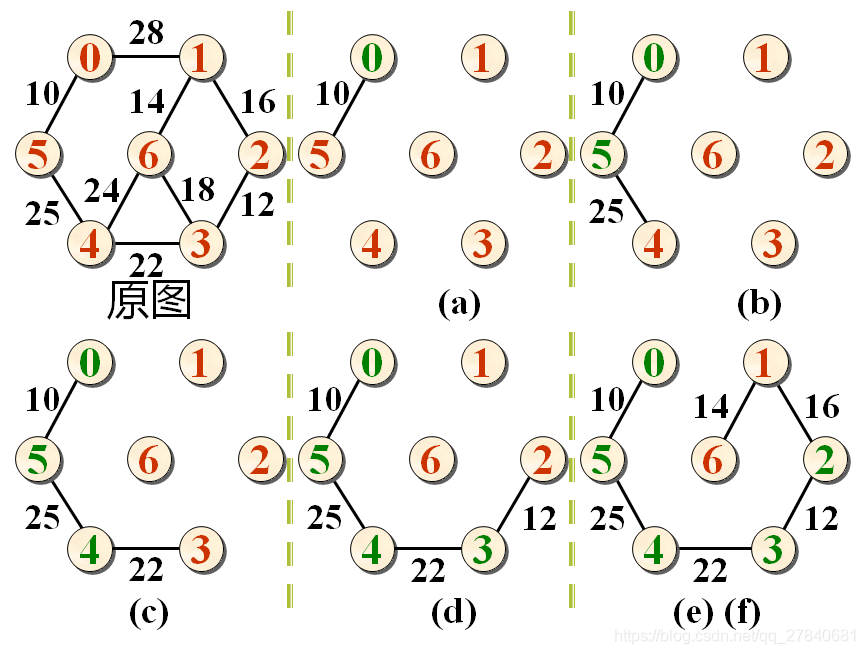
(1)Kruskal
-
思想:初始时,每个顶点都是一个单独的连通分量。选取权值最小的边,若该边两端的顶点不在同一个连通分量中,则将该边和顶点加入到连通图T中;否则,将该边舍去,再次选取权值最小的边,直到所有顶点再连通图中。
-
过程:
-
代码:
//利用最小堆和并查集
void Kruskal(Graph G, MinSpanTree MST)
{
int n = G.getNumberOfV; //顶点数
int m = G.getNumberOfE(); //边数
MinHeap<MSTEdgeNode> H;
UFSets F; //并查集
//构建最小堆
MSTEdgeNode ed;
for(int i=0; i<n;i++)
{
for(int j=i+1;j<n;j++)
{
if(G.getWeight(u,v) != -1)
{
ed.head = u; ed.tail = v;
ed.cost = G.getWeight(u,v);
H.insert(ed);
}
}
}
for(int i=0;i<n;)
{
if(H.empty()) return;
H.remove(ed);
int u = ed.head, v = ed.tail;
if(u!=v)
{
F.union(u,v);
MST.insert(ed);
i++;
}
}
}
(2)Prim
- 思想:从某一顶点出发,选择最小权值的边,将其顶点加入到最小生成树U中。然后每一步从U中和不在U中各选一个顶点,构成的权值最小的边加入集合U中,直到所有顶点加入U中。
- 过程:
- 代码
void Prim(Graph G, MinSpanTree MST)
{
int n = G.getNumberOfV; //顶点数
int m = G.getNumberOfE(); //边数
MinHeap<MSTEdgeNode> H;
....
}
(3)总结

5. 最短路径
单源最短路径:给定源点v,求v到其他各个顶点的最短路径。
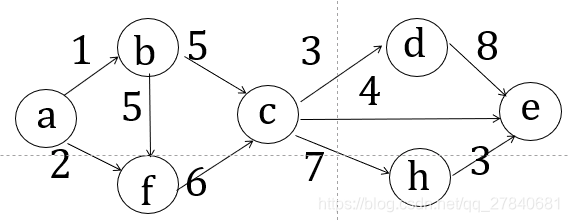
(1)单源最短路径(非负)——Dijkstra
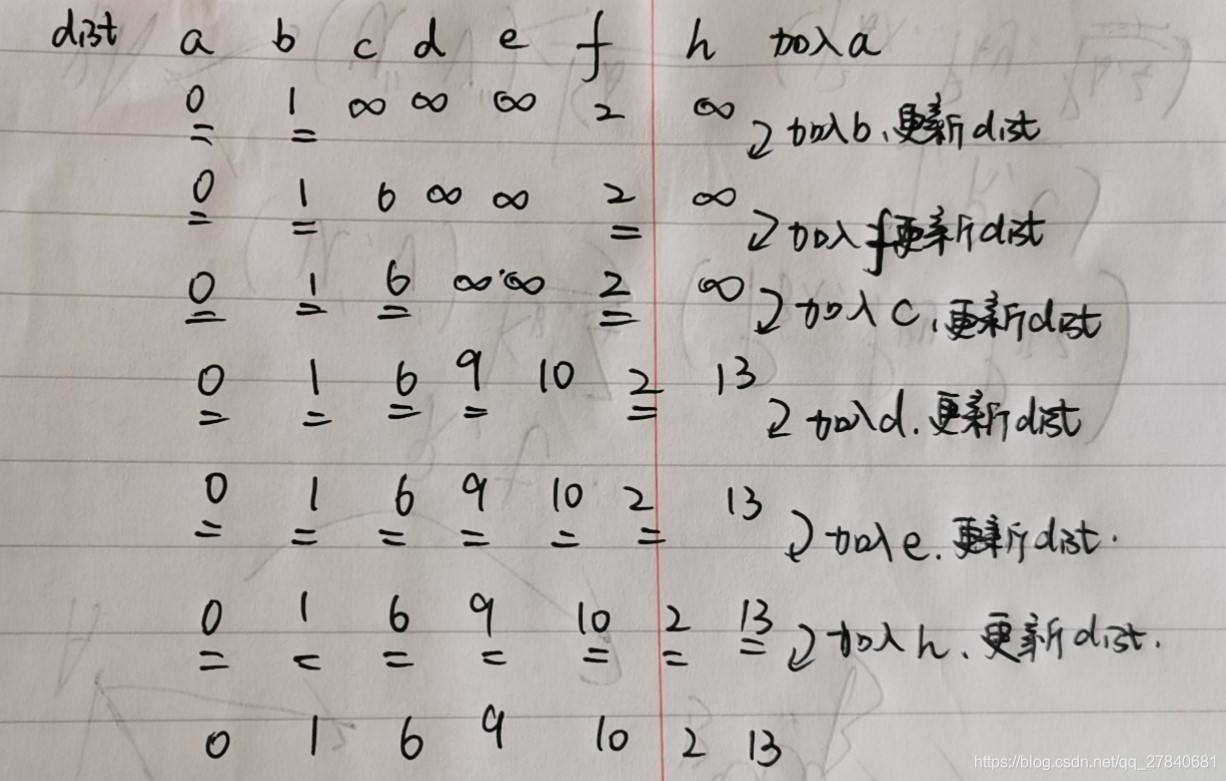
- 思想:广度优先搜索,并采用贪心的策略。声明一个dist数组保存源点到各个顶点的最短距离,并声明一个集合T保存已经找到的最短路径的顶点。初始时,更新dist为直接相连的路径长度。然后从dist中选取最短路径的顶点,加入T。此时,需要判断新加入的顶点是否对集合中其他顶点的dist有影响,(即通过该顶点到达其他点的路径是否比dist短),若有则更新dist。直到T包含所有所有顶点。
- 过程:
(2)单源最短路径(任意值)——Bellman-Ford
- 思想:从源点逐次绕过其他顶点,以缩短到达其他顶点的最短路径的方法。(图中不能包含有由负权值边组成的回路)。构建最短路径长度数组,dist1[u], dist2[u], dist3[u]…dist(n-1)[u]表示从源点到终点u经过n-1条边的最短路径长度。

(3)所有顶点之间最短路径——Floyd
- 思想:初始化矩阵a, a[i][j] 表示i到j的最短路径。初始化矩阵b,b[i][j]表示i到j经过b[i][j]顶点可以达到最短路径。然后进行n次更新,对每一对i和j,判断经过第0/1/2…n个结点时,最短路径是否缩小,并更新。
6. 活动网络
(1)AOV网络
- 定义:有向图表示一个工程,顶点表示活动,有向边<i,j>表示活动i必须先于j进行。此外,不能存在有向环。
- 有向环的检测:对AOV网络构造拓扑有序序列,使得网络中所有前驱和后继关系都能得到满足。如果AOV网络中有顶点不能加入拓扑序列中,则存在有向环。
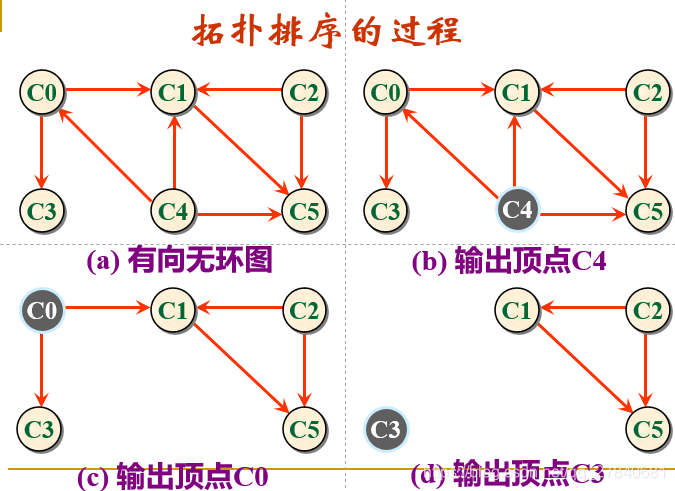
(1.1)拓扑排序
-
定义:构造AOV网络全部顶点的拓扑有序序列的运算。
-
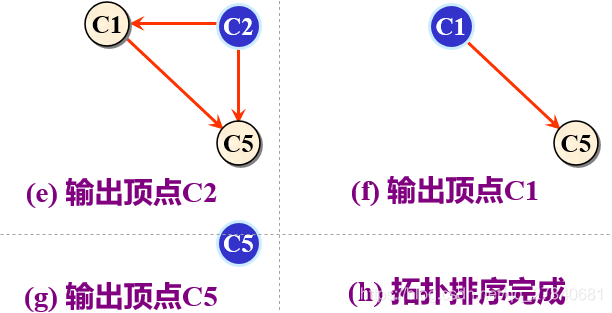
思想:选取没有直接前驱的结点,输出,然后删去该顶点和其发出的有向边。重复上面的操作,直到所有顶点均输出。如果还有未输出的顶点,说明存在有向环。
-
举例
-
代码
//对邻接表新增一个数组count,记录各顶点的入度。
//建立入度为0的顶点栈
stack<int> s;
for(int i=0;i<n;i++)
{
if(count[i]==0) s.push(i);
}
//拓扑排序n个顶点
for(int i=0;i<n;i++)
{
if(s.empty()) {cout<<"有回路"; return;}
int t = s.top(); s.pop(); cout<<t<<" ";
for(w in t的出边的顶点)
{
count[w]--;
if(count[w]==0) s.push(w);
}
}
- 时间复杂度:
若AOV网络中有n个顶点,e条边。每个顶点入栈一次,出栈一次。出栈时,遍历该顶点的出边,对其他顶点更新,次数为e。所以O(n+e)。
(2)AOE网络
- 定义:边表示工程中的活动,边上的权值表示活动的持续时间,顶点表示事件。源点:起始点,汇点:结束点。只有源点到汇点所有路径上的所有活动都完成,整个工程才算完成。
- 应用:完成整个工程需要多少时间?为缩短工期,应加快哪些活动?
- 关键路径:最长的路径,该路径决定了整个工程完成的时间,即这条路径上所有活动持续时间之和。
- 关键活动:关键路径上的活动(边)都为关键活动。任一关键活动延迟,整个工程延迟。任一关键活动加速,整个工程不一定提前,需要考虑关键路径上所有关键活动。
- 关键活动的判断:
条件:活动最早可能开始时间==活动最迟允许开始时间
(1)首先将所有事件按照拓扑排序编号。
(2)活动最早可能开始的时间:
j从活动0开始 ,i为前继。
(3)活动最迟允许开始时间:
j从活动n-1开始,反向递推,k为后继。


















 3469
3469

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









