




一、概述
基于STM32的平衡车项目是一个结合了嵌入式系统、传感器技术和控制理论的综合性项目。该项目通过使用STM32微控制器作为核心处理单元,结合陀螺仪、编码器、电机驱动等模块,实现平衡车的自主平衡和速度控制。
二、核心组件
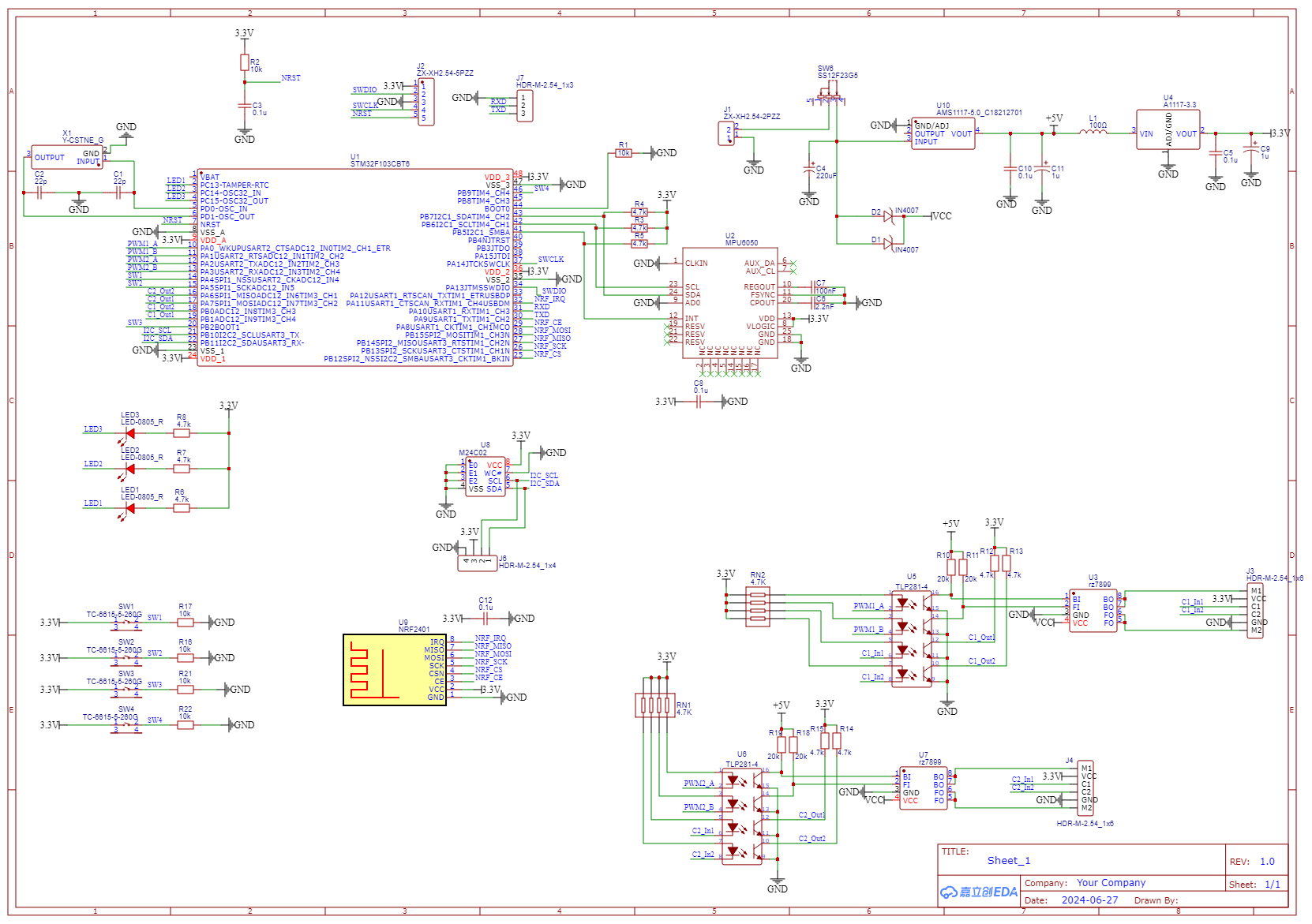
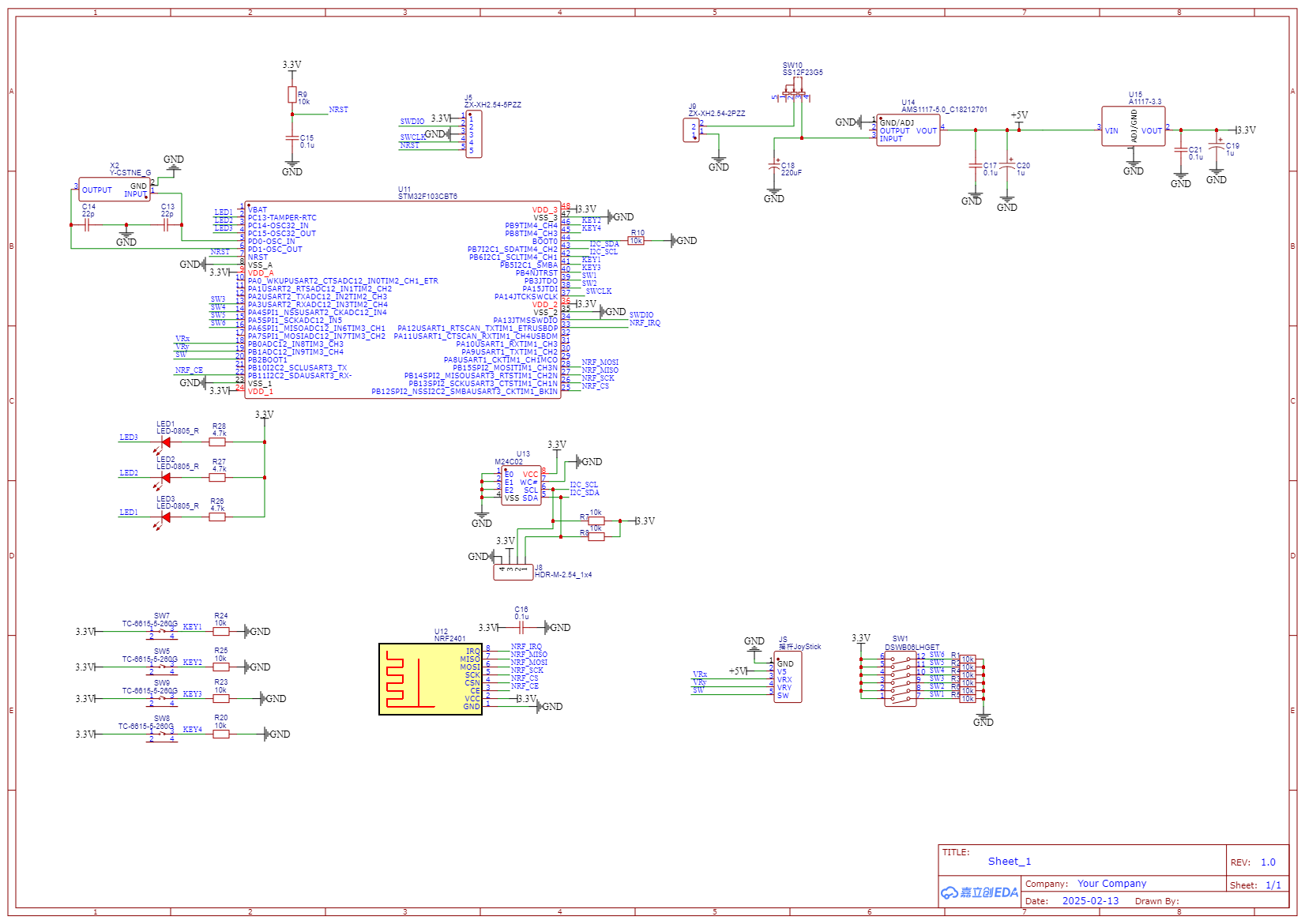
- STM32微控制器:作为平衡车的“大脑”,STM32微控制器负责处理来自传感器的数据,并根据这些数据计算出控制策略,通过电机驱动模块实现平衡车的运动控制。STM32系列微控制器具有强大的运算能力和丰富的外设接口,非常适合用于此类复杂控制项目。
- 陀螺仪模块:如MPU6050等,用于实时监测平衡车的倾角和角速度。这些数据是控制器进行平衡控制的重要依据。
- 电机驱动模块:如L298N或TB6612等,用于驱动平衡车的电机。电机驱动模块接收来自控制器的指令,通过调整电机的转速和转向,实现平衡车的运动。
- 编码器:用于测量电机的转速,提供速度反馈,帮助控制器实现更精确的速度控制。
- 电源模块:为整个系统提供稳定的电源供应,确保平衡车能够正常工作。
三、控制原理
平衡车的控制原理基于倒立摆模型,通过PID控制算法实现。PID控制器通过比例(P)、积分(I)和微分(D)三个环节来控制平衡车的平衡和速度。
- 直立环控制:通过PD控制实现,控制器输出与倾角和角速度成比例的控制量,驱动电机进行调整,以保持平衡车的直立状态。
- 速度环控制:通过PI控制实现,控制器根据实际速度与期望速度的偏差,计算出需要的加速度,并通过调整电机转速实现速度控制。
原理图下载地址:https://download.youkuaiyun.com/download/qq_26043945/



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











