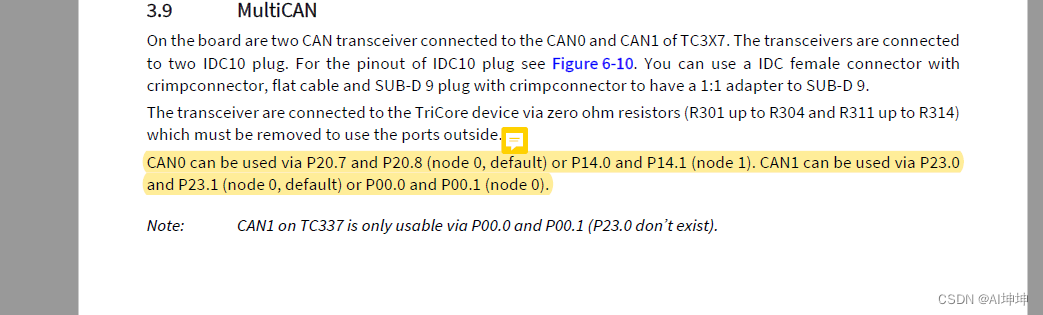
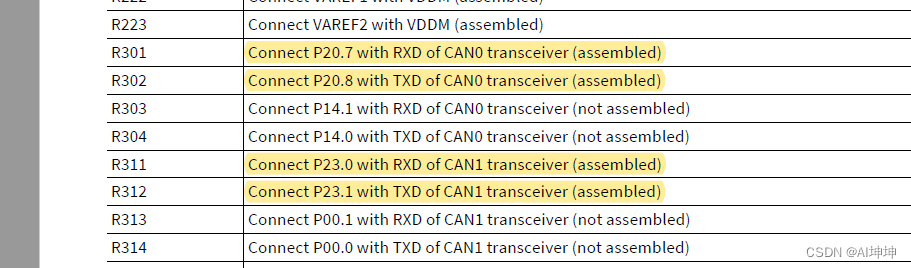
返回总目录 目录 配置流程 step1 CAN控制器选择 step2 端口配置 step3 中断配置 Step4 CAN模块配置 Step5 初始化配置 配置流程 step1 CAN控制器选择 TC377上面,明确指出了只有两路CAN可供使用,CAN0的node0和node1. CAN1的node0和node1 但因为电阻适配问题,整个开发板只有CAN0的node0和CAN1的node0可供使用。以下所有流程都基于此选择。 step2 端口配置 已有P20.7和P20.8配置,目前新需要配置的端口是P23.0和P23.1 <








 超级会员免费看
超级会员免费看
 本文档详细介绍了在TC377嵌入式硬件上配置多路CAN接口的过程,包括CAN控制器的选择,端口P23.0和P23.1的配置,中断设置,CAN模块的配置以及初始化代码。重点关注了只可用的CAN0的node0和CAN1的node0,以及中断号CanSR0和CanSR1的配置。
本文档详细介绍了在TC377嵌入式硬件上配置多路CAN接口的过程,包括CAN控制器的选择,端口P23.0和P23.1的配置,中断设置,CAN模块的配置以及初始化代码。重点关注了只可用的CAN0的node0和CAN1的node0,以及中断号CanSR0和CanSR1的配置。


 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






