







 超级会员免费看
超级会员免费看
 本文介绍了使用小觅双目摄像头MYNTEYE-S1030-IR和自制双目摄像头在ORB-SLAM2与RTAB-Map上的测试效果,包括摄像头的配置、标定、ORB-SLAM2与RTAB-Map的启动和运行截图。测试结果展示了不同设备在SLAM算法上的应用表现。
本文介绍了使用小觅双目摄像头MYNTEYE-S1030-IR和自制双目摄像头在ORB-SLAM2与RTAB-Map上的测试效果,包括摄像头的配置、标定、ORB-SLAM2与RTAB-Map的启动和运行截图。测试结果展示了不同设备在SLAM算法上的应用表现。
文章目录
- 小觅双目摄像头MYNTEYE-S1030-IR和自制双目摄像头测试ORB-SLAM2和RTAB-Map的运行效果对比
- RTAB-Map用RealSenseD435i的双目、RGBD和自制双目测试效果对比
小觅双目摄像头MYNTEYE-S1030-IR和自制双目摄像头测试ORB-SLAM2和RTAB-Map的运行效果对比
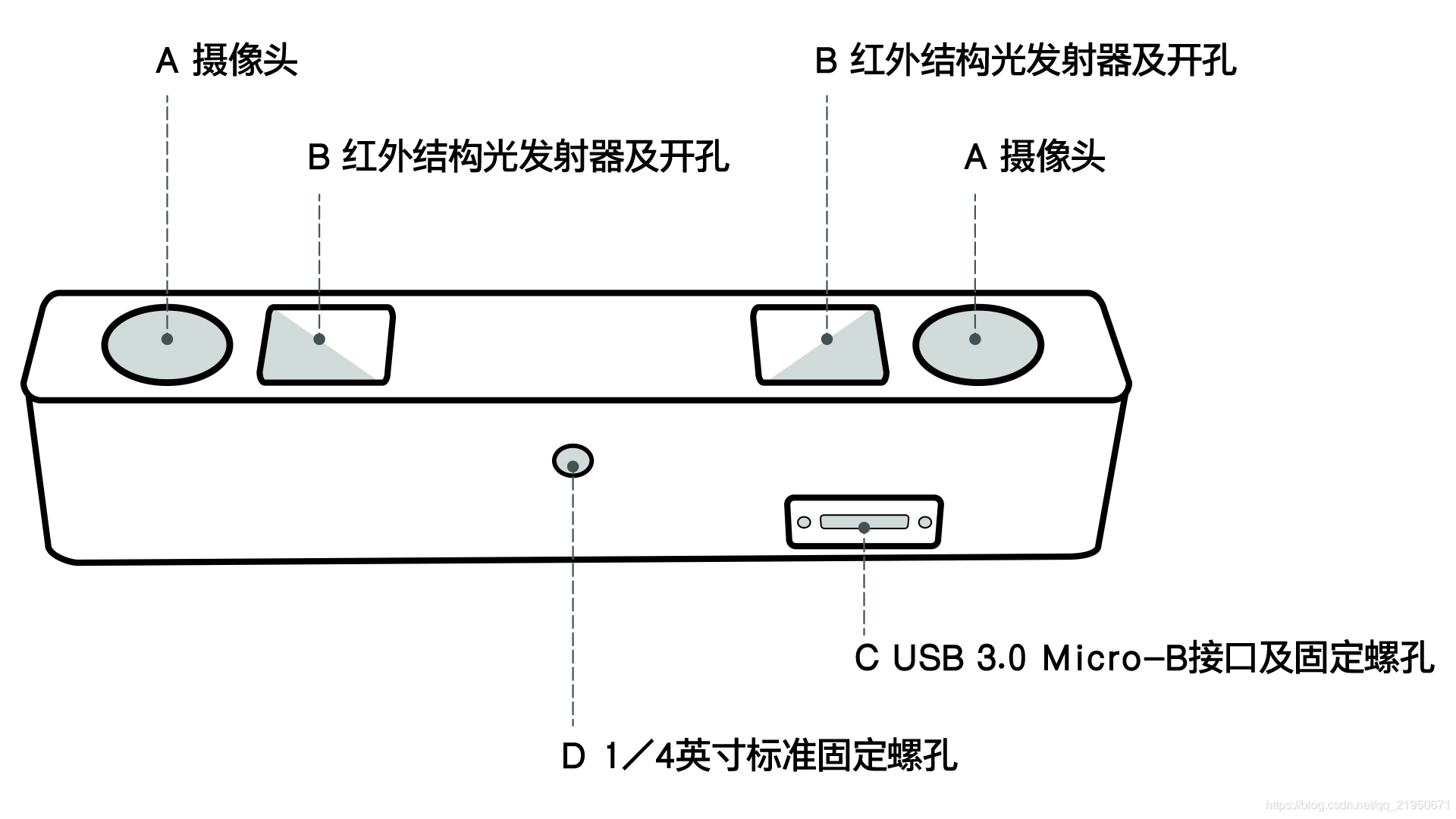
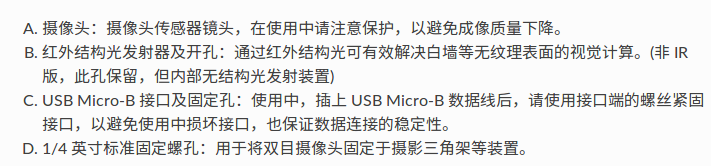
小觅双目摄像头MYNTEYE-S1030-IR介绍
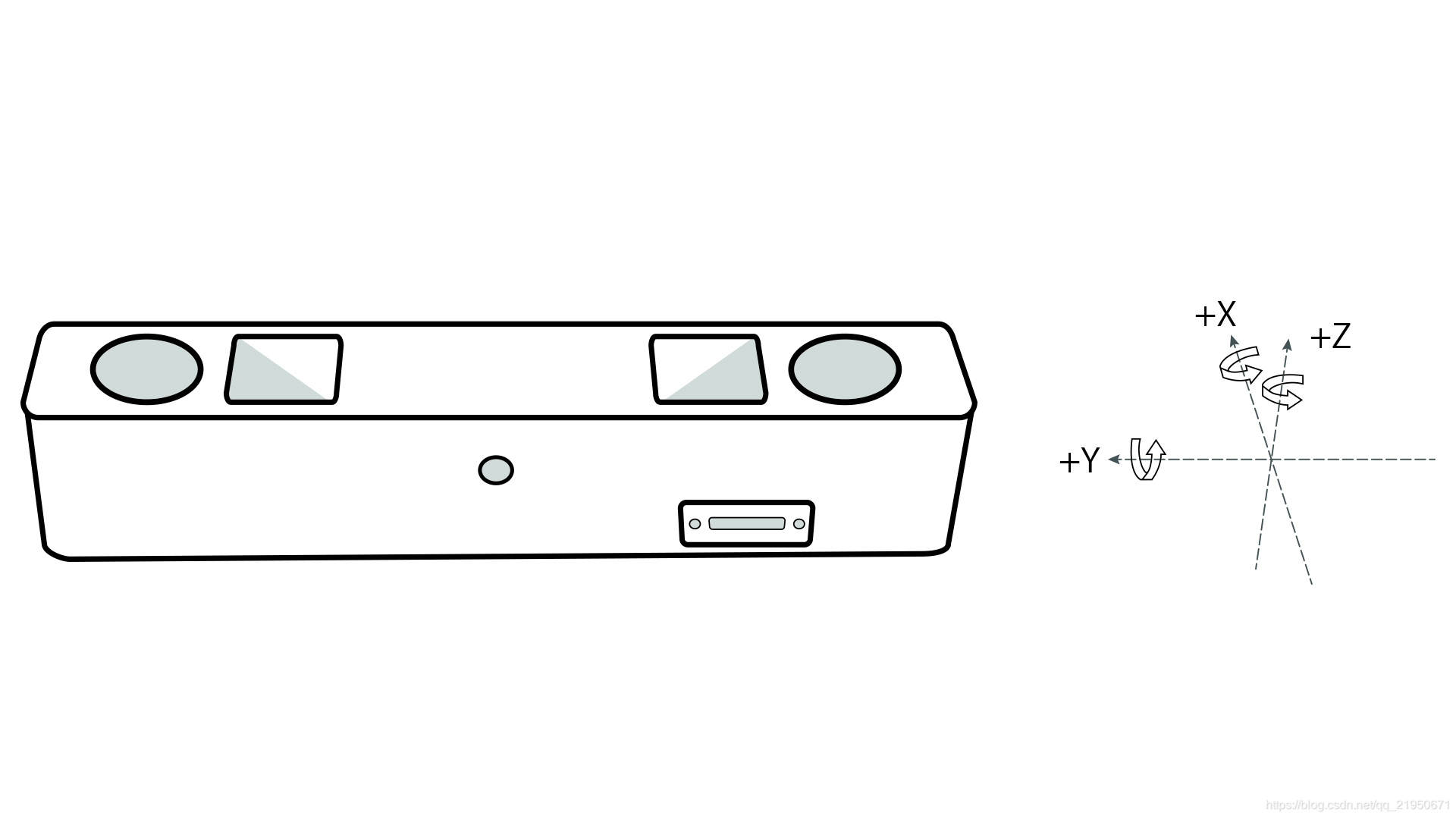
MYNTEYE-S1030 IMU 坐标系统为右手系,坐标轴方向如下:
安装MYNT-EYE-S-SDK
mkdir -p ~/ROS_WORKSPACE/mynt_eye_sdk/src
cd ROS_WORKSPACE/m
 订阅专栏 解锁全文
订阅专栏 解锁全文



















 2410
2410

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











