




 本文深入探讨了边缘检测理论,提出使用高斯二阶导数和拉普拉斯算子进行图像强度变化检测的方法,强调了空间定位约束的重要性,并讨论了算法在生物学上的应用。
本文深入探讨了边缘检测理论,提出使用高斯二阶导数和拉普拉斯算子进行图像强度变化检测的方法,强调了空间定位约束的重要性,并讨论了算法在生物学上的应用。
此主要讨论图像处理与分析。虽然计算机视觉部分的有些内容比如特 征提取等也可以归结到图像分析中来,但鉴于它们与计算机视觉的紧密联系,以 及它们的出处,没有把它们纳入到图像处理与分析中来。同样,这里面也有一些 也可以划归到计算机视觉中去。这都不重要,只要知道有这么个方法,能为自己 所用,或者从中得到灵感,这就够了。
8. Edge Detection
边缘检测也是图像处理中的一个基本任务。传统的边缘检测方法有基于梯度 算子,尤其是 Sobel 算子,以及经典的 Canny 边缘检测。到现在,Canny 边缘检 测及其思想仍在广泛使用。关于 Canny 算法的具体细节可以在 Sonka 的书以及 canny 自己的论文中找到,网上也可以搜到。最快最直接的方法就是看 OpenCV 的源代码,非常好懂。在边缘检测方面,Berkeley 的大牛 J Malik 和他的学生 在 2004 年的 PAMI 提出的方法效果非常好,当然也比较复杂。在复杂度要求不高 的情况下,还是值得一试的。MIT的Bill Freeman早期的代表作Steerable Filter 在边缘检测方面效果也非常好,并且便于实现。这里给出了几篇比较好的文献, 包括一篇最新的综述。边缘检测是图像处理和计算机视觉中任何方向都无法逃避 的一个问题,这方面研究多深都不为过。
[1980] theory of edge detection
[1983 Canny Thesis] find edge
[1986 PAMI] A Computational Approach to Edge Detection
[1990 PAMI] Scale-space and edge detection using anisotropic diffusion
[1991 PAMI] The design and use of steerable filters
[1995 PR] Multiresolution edge detection techniques
[1996 TIP] Optimal edge detection in two-dimensional images
[1998 PAMI] Local Scale Control for Edge Detection and Blur Estimation
[2003 PAMI] Statistical edge detection_ learning and evaluating edge cues
[2004 IEEE] Edge Detection Revisited
[2004 PAMI] Design of steerable filters for feature detection using canny-like criteria
[2004 PAMI] Learning to Detect Natural Image Boundaries Using Local Brightness, Color, and Texture Cues
[2011 IVC] Edge and line oriented contour detection State of the art
翻译
边缘检测理论——http://tongtianta.site/paper/32263#anchor_25
作者:D. MARR AND E. HILDRETH
请参阅本出版物的讨论,统计数据和作者简介:https://www.researchgate.net/publication/17083076
摘要 -提出了边缘检测理论。分析分为两部分。 (1)在不同尺度上分别检测在很大范围内的自然图像中发生的强度变化。在给定比例下用于此目的的适当滤波器被发现是高斯的二阶导数,并且示出了,只要满足一些简单条件,这些主滤波器不需要定向相关。因此,通过找到图像 I 的 G(x,y)* I(x,y)的零值,可以最好地检测给定尺度的强度变化,其中G(x,y)是二维高斯分布和是拉普拉斯算子。然后,在每个通道中发现的强度变化由称为过零段的定向基元表示,并且证明该表示是完整的。 (2)图像中的强度变化来自表面不连续或来自反射或照明边界,并且这些都具有它们在空间上局部化的特性。因此,来自不同通道的过零段不是独立的,并且推导出将它们组合成图像描述的规则。此描述称为原始原始草图。该理论解释了几个基本的心理物理学发现,并且从作用于图像的中心环绕
G(x,y)* I(x,y)的零值,可以最好地检测给定尺度的强度变化,其中G(x,y)是二维高斯分布和是拉普拉斯算子。然后,在每个通道中发现的强度变化由称为过零段的定向基元表示,并且证明该表示是完整的。 (2)图像中的强度变化来自表面不连续或来自反射或照明边界,并且这些都具有它们在空间上局部化的特性。因此,来自不同通道的过零段不是独立的,并且推导出将它们组合成图像描述的规则。此描述称为原始原始草图。该理论解释了几个基本的心理物理学发现,并且从作用于图像的中心环绕 G 滤波器的输出形成定向过零段的操作形成了简单细胞的生理模型的基础(参见Marr&Ullman 1979)。
G 滤波器的输出形成定向过零段的操作形成了简单细胞的生理模型的基础(参见Marr&Ullman 1979)。
引言
Hubel&Wiesel(1962)和Campbell&Robson(1968)的实验引入了两个相当不同的概念,即早期信息处理在高级视觉系统中的功能。Hubel&Wiesel将简单细胞描述为线状的条状或边缘形状的感受野导致皮层视图包含一组特征检测器(Barlow 1969,第881页),调整到各种宽度和方向的边缘和条形。Campbell & Robson的实验表明,视觉信息是由许多独立的方向和空间频率调谐的频道并行处理的,这表明了一种截然不同的观点,它以极端的形式将视觉皮层描述为一种空间傅里叶分析仪(Pollen等,1971; Maffei& Fiorentini 1977)。
每一种观点的主角都能够对另一种观点提出实质性的批评。反对傅立叶解释的要点是:(1)通道的带宽不窄(1.6个八度,Wilson&Bergen 1979)。相应的感受野具有明确的空间定位。 (2)正如Campbell & Robson发现的那样,早期的视觉信息处理不是线性的(例如概率求和(Graham 1977; Wilson&Giese 1977)和叠加失败(Maffei&Fiorentini 1972 a))。 (3)只有基本的相位信息显然是编码的(Atkinson&Campbell 1974)。
反对线性特征检测器思想的要点是,如果一个简单的单元真实地发信号通知其条形感受野的线性卷积的正或负部分与图像强度,它很难被认为是一些关于图像中存在条形的象征性断言(Marr 1976a,p.648)。这种细胞必然响应比酒吧其他许多刺激,更大力,例如,到一个明亮的边缘比到昏暗巴,并且因此不会在它的响应,以保证被称为一个特征检测器足够特异性的。
也许两个阵营面临的最大困难是,这两种方法都无法直接提供有关图像早期分析目标的信息。这激发了一种新的视觉方法,它直接询问了视觉本身任务中固有的信息处理问题(Marr 1976a,b;并参见Marr 1978的整体方案)。根据该方案,早期视觉处理的目的是构造图像的原始但丰富的描述,该描述将用于确定可见表面的反射率和照度,以及它们相对于观察者的方向和距离。图像的第一个原始描述称为原始草图(Marr 1976b),它由两部分组成。首先,使用边缘段,条形图,斑点和终点的原始语言来描述图像中的强度变化。这种描述被称为原始的原始草图(Marr 1976b,p.497)。其次,几何关系是明确的(使用虚线),并且通过以各种方式选择,分组和概括原始基元来构造更大的,更抽象的标记。由此产生的描述层次涵盖了一系列尺度,称为图像的完整原始草图。
虽然原始草图的灵感来源于哺乳动物视觉系统的发现,但直到最近我们才无法将其作为人类早期视觉详细理论的基础。现在有三个发展使这成为可能:(a)关于早期人类视觉中存在的通道的定量信息的出现(Cowan 1977; Graham 1977; Wilson&Giese 1977; Wilson&Bergen 1979); (b)Marr&Poggio(1979)的人类视觉理论(特别是编写它的框架); (c)Marr等人的相关观察。 (1979)关于像Logan(1977)定理的结果与早期视觉的相关性。
这些进步使得制定令人满意的计算理论成为可能。本文讨论第一部分,原始原始草图的推导。理论本身分为两部分,第一部分涉及每个频道内的分析,第二部分则结合来自不同频道的信息。每个计算部分都讨论了实现的算法理论,并举例说明。
本文的后半部分探讨了对生物学的影响。算法的行为表明了一系列基本的心理学发现,并提出了一个特定的神经实现。我们的模型并不打算作为生理机制的完整建议,因为它忽略了方向选择性的特性,因此遍及皮质单纯细胞。然而,该模型确实明确了我们认为的某些非线性特征至关重要,它构成了Marr&Ullman(1979)更完整提案的起点,该方案结合了方向选择性。
检测和表示图像中的强度变化
自然图像的一个主要困难是变化可以并且确实发生在各种尺度上(Marr 1976a,b)。没有一个过滤器可以在所有尺度上同时最佳,因此应该寻求一种单独处理不同尺度发生的变化的方法。这一要求以及Campbell&Robson(1968)的研究结果得出了基本思想,如图1所示,其中一个首先采用不同分辨率的图像的局部平均值,然后检测每个分辨率发生的强度变化。一。为了实现这个想法,我们需要确定(a)最佳平滑滤波器的性质,以及(b)如何检测给定尺度的强度变化。
最佳平滑滤波器
有两个物理因素可以组合起来确定合适的平滑滤波器。首先,过滤图像的动机是减少发生强度变化的尺度范围。因此,滤波器的频谱应该在频域中平滑且频带受限。我们可以通过要求它的方差 应该很小来表达这种情况。
应该很小来表达这种情况。
第二个考虑最好表示为空间域中的约束,我们称之为空间定位的约束。世界上引起图像强度变化的事物是:(1)照明变化,包括阴影,可见光源和照明梯度; (2)与可见表面的观察者的方向或距离的变化; (3)表面反射率的变化。这里的批判性观察是,按照自己的规模,这些东西都可以被认为是空间本地化的。除了偶尔的衍射图案外,视觉世界不是由波纹状的波状原始物构成的,它们在一个区域上延伸并加在一起(参见Marr 1970,第169页),但是轮廓,折痕,划痕,标记,阴影和(明暗)阴影。
我们对此约束的结果是,对滤波图像中每个点的贡献应来自附近点的平滑平均值,而不是广泛分散点的任何平均值。因此,我们寻找的滤波器也应该是平滑的并且在空间域中定位,特别是其空间方差 也应该是小的。
也应该是小的。
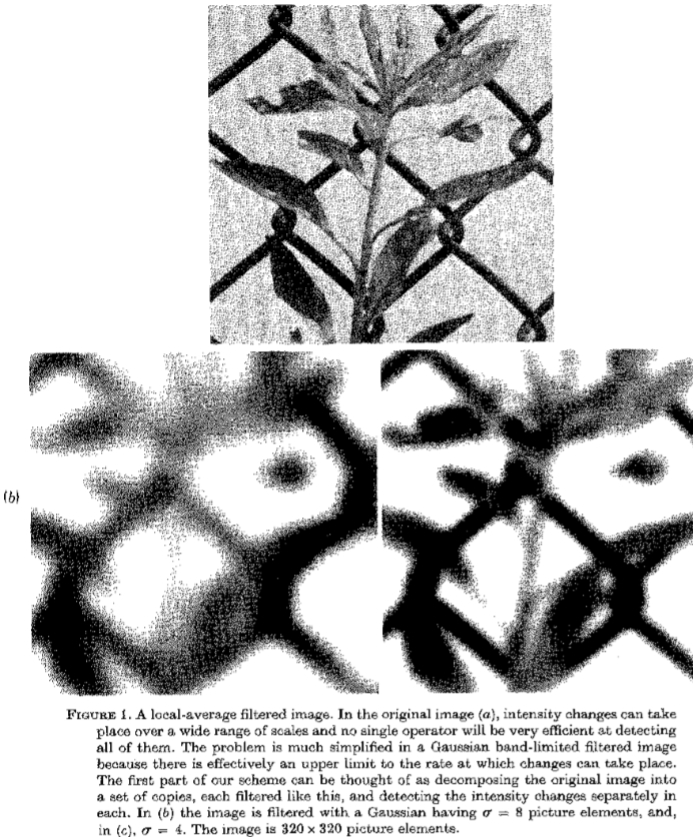
 = 8个图像元素的高斯滤波图像,并且在(c)中,= 4.图像是320×320个图像元素。
= 8个图像元素的高斯滤波图像,并且在(c)中,= 4.图像是320×320个图像元素。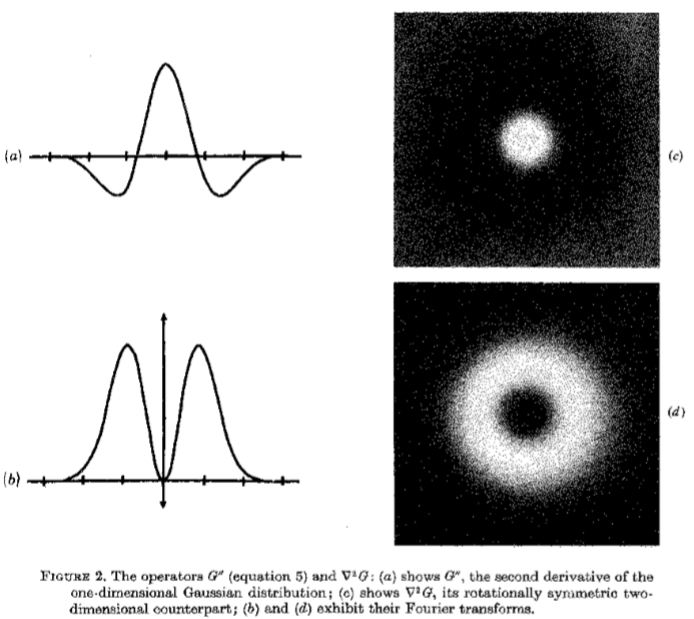
图2.运算符G“(等式5)和 G:(a)表示G”,一维高斯分布的二阶导数; (c)显示G,其旋转对称的二维对应物; (b)和(d)展示其傅立叶变换。
不幸的是,这两个本地化要求,即空间和频域中的要求是相互矛盾的。事实上,它们与不确定性原理有关,该原则指出 (例如,见Bracewell 1965,pp.160-163)。此外,只有一种分布可以优化这种关系(Leipnik 1960),即高斯分布
(例如,见Bracewell 1965,pp.160-163)。此外,只有一种分布可以优化这种关系(Leipnik 1960),即高斯分布
在二维中,
因此,过滤器G在我们的冲突要求之间提供了最佳的权衡。
检测强度变化
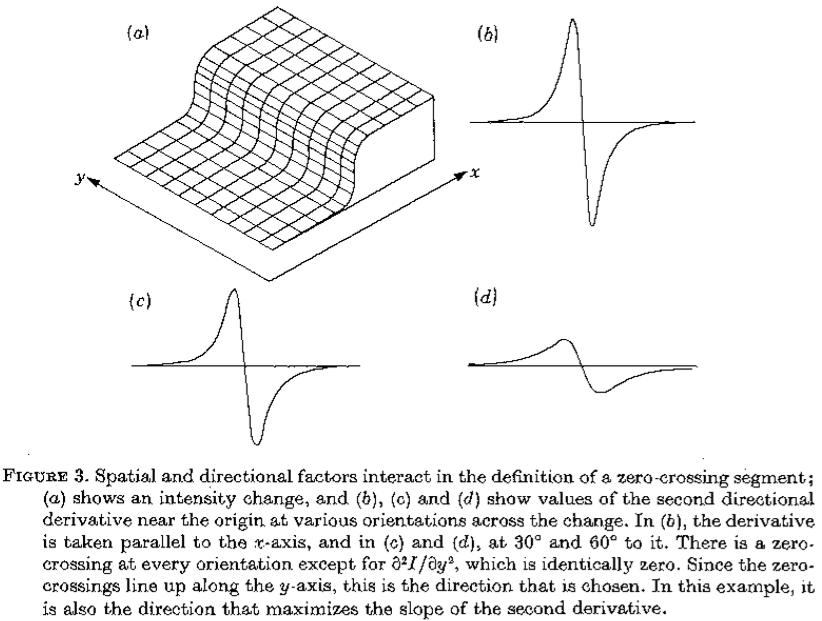
图3.空间和方向因素在过零段的定义中相互作用; (a)表示强度变化,(b),(c)和(d)表示在变化的各个方向上原点附近的第二方向导数的值。在(b)中,导数与x轴平行,在(c)和(d)中,在30度和60度 它。除了 之外,每个方向都有一个过零点,它相同为零。由于零交叉沿y轴排列,因此这是所选择的方向。在这个例子中,它也是使二阶导数的斜率最大化的方向。
之外,每个方向都有一个过零点,它相同为零。由于零交叉沿y轴排列,因此这是所选择的方向。在这个例子中,它也是使二阶导数的斜率最大化的方向。
无论强度发生何种变化,在第一个方向导数中都会有一个相应的峰值,或者相当于第二个方向强度导数的过零点(Marr 1976b; Marr&Poggio 1979)。实际上,我们可以用这种方式定义强度变化,以便检测这些变化的任务可以减少到在适当的方向上找到强度的二阶导数 的过零点。也就是说,我们寻求零交叉
的过零点。也就是说,我们寻求零交叉
其中 I(x,y)是图像,*是卷积运算符。由衍生物—卷积规则,
我们可以将运算符 写为G“,并在一个维度上
写为G“,并在一个维度上
G“(x)看起来像墨西哥帽子操作员(见图2),它非常类似于Wilson S&Giese(1977)两个高斯(DOG)的差异,事实上,它是DOG功能的极限这两个高斯人彼此倾向(见图11和附录B)。它是近似带通运算符,半功率带宽约为1.2倍频程,因此可以将其视为查看图像频谱的一个特定部分中包含的信息。
这些论点确定原则上可以通过将图像与运算符卷积并在其输出中寻找零交叉来检测一个尺度的强度变化。只有一个问题仍未解决,它涉及与相关的方向。在任何方向上选择二阶导数的过零是不够的。要理解这一点,想象一下沿y轴向下的均匀强度变化,如图3所示。在原点,第二方向导数在每个方向上都是零,但除了沿y轴,它在每个方向上都是非零的。
应该在哪个方向上采用衍生物?
为了选择使用哪个方向导数,我们观察到检测强度变化的潜在动机是它们将对应于物理世界的有用属性,例如反射率,照度,表面方向或距观察者的距离的变化。这些属性在空间上是连续的,并且几乎可以在任何地方与投射到图像中的方向的方向相关联。因此,我们选择使用的方向导数的方向与其零交叉局部形成的方向一致。在图3中,这个方向是y轴,因此我们选择的方向导数是 。
。
在什么条件下,这个方向与零交叉具有最大斜率的方向一致? 对此的答案由定理1给出(见附录A),我们称之为线性变化的条件:
零交叉线附近和平行的强度变化应该是线性的。
在平滑图像中,这种情况几乎是正确的,在本文的其余部分,我们
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2342
2342

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









