







目录
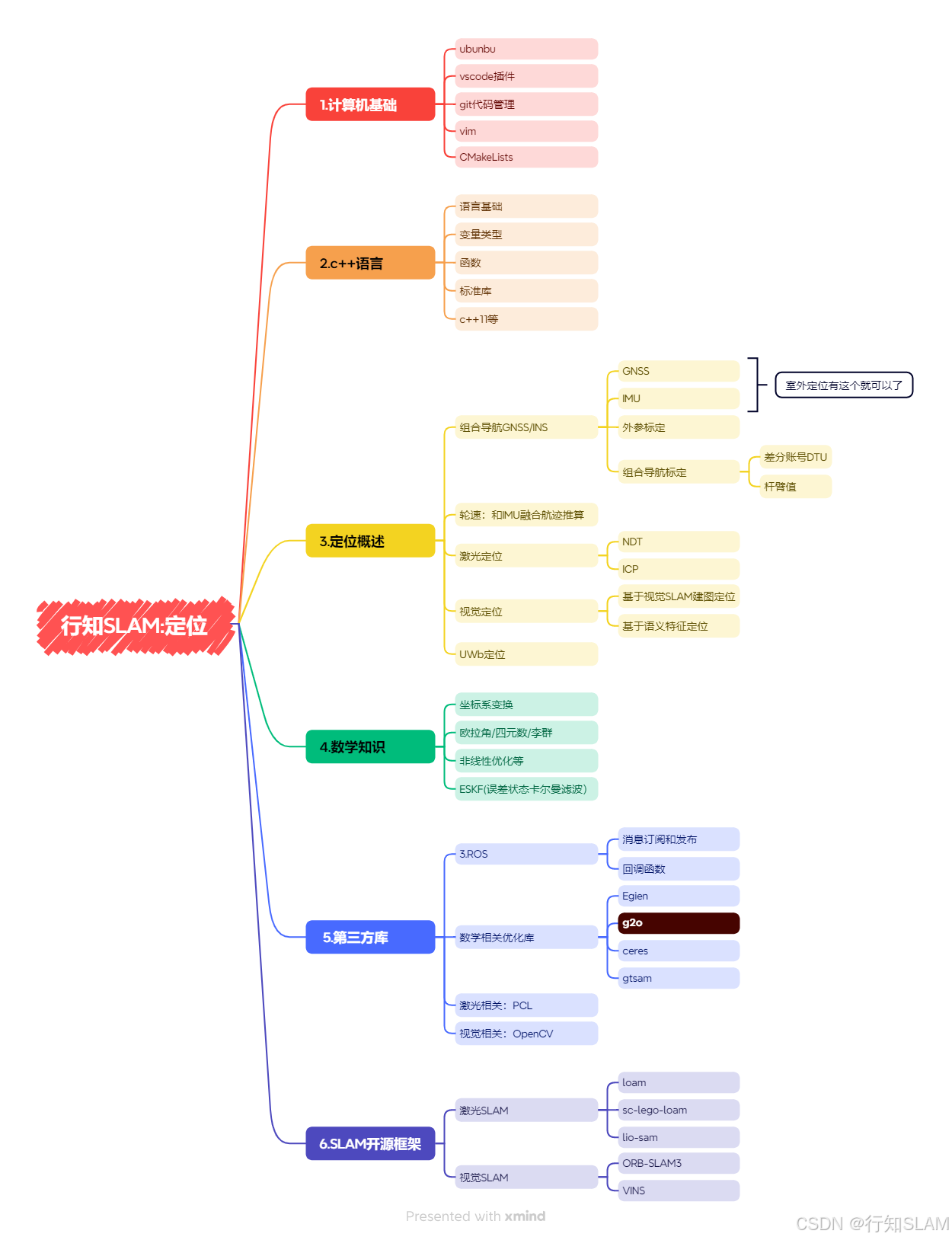
前言:笔者于2017年读研开始选择视觉SLAM作为自己的研究方向,到工作从事建图及定位相关工作已经快7年了,深知研究SLAM的不易。本专栏博客将工作所用的C++、ROS、SLAM理论及开源算法进行系统总结,希望带领大家系统入门SLAM,了解机器人及其自动驾驶工作中真正的SLAM定位。首先,SLAM涉及的知识多而杂,如需要掌握计算机相关知识(涉及ubuntu编译环境、c++、cmake及git等)、数学知识、ROS、SLAM理论及改进创新等,下面是学习机器人SLAM所用到的知识体系思维导图。本专栏博客将按照下面思维导图逐一进行知识总结,帮助大家快速入门并了解工作中SLAM真正用到的知识。
第一章 视觉SLAM学习总结
1.1 书籍推荐
(1)机器人必读经典书籍:
Thrun S, Burgard W, Fox D. 《Probabilistic robotics》[M]. Cambridge, USA: MIT Press, 2005(概率机器人);
《Principles of Robot Motion Theory,Algorithms and Implementation》。
(2)会议论文文集:
《Robotics: Science and Systems》. Cambridge, USA: MIT Press
会议进展网站:Robotics: Science and Systems - Online Proceedings
(3)SLAM入门书籍:
《SLAM for Dummies》
(4)SLAM入门教材吐血推荐,对深入理解SLAM实质非常有帮助:
《STATE ESTIMATION FOR ROBOTICS》(状态估计)
(5)关于Graph-SLAM的教程,包含位姿变换、传感器模型、图优化以及SLAM中的稀疏性求解:
《Course on SLAM》
(6)加州伯克利的一本2D LIDAR SLAM小书
《Loop Closure Transformation Estimation and Verification Using 2D LiDAR Scanners》
(7)多视图几何官网课程和代码:
Multiple View Geometry in Computer Vision
1.2 公开课推荐
(1)内含大量SLAM公开课相关资料(PPT、音视频文件)
Robot Mapping - WS 2015/16 - Arbeitsgruppe: Autonome Intelligente Systeme
(2)YouTube的Cyrill Stachniss主页(课堂讲授SLAM的视频集)
https://www.youtube.com/channel/UCi1TC2fLRvgBQNe-T4dp8Eg
(3)内含Andrew Davison的SLAM公开课资料
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1509
1509

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











