







 超级会员免费看
超级会员免费看
 本文详细介绍了如何将STM32的独立看门狗IWDG驱动程序从STM32CubeMX移植到STM32F070F6P6的工程中,包括在CubeMX中配置看门狗、设置时钟和分频系数,以及在工程中引入驱动文件、启用相关宏和创建自定义的IWDG头文件和实现文件。通过这些步骤,实现了5秒周期的看门狗功能,并提供了喂狗操作的方法。
本文详细介绍了如何将STM32的独立看门狗IWDG驱动程序从STM32CubeMX移植到STM32F070F6P6的工程中,包括在CubeMX中配置看门狗、设置时钟和分频系数,以及在工程中引入驱动文件、启用相关宏和创建自定义的IWDG头文件和实现文件。通过这些步骤,实现了5秒周期的看门狗功能,并提供了喂狗操作的方法。
单片机型号:STM32F070F6P6
本文介绍将看门狗驱动程序移植到自己工程中的方法,本项目使用的是独立看门狗IWDG。
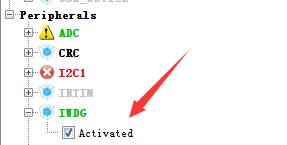
1、在STM32CubeMX中使能看门狗,如下图所示。
2、查看看门狗时钟。
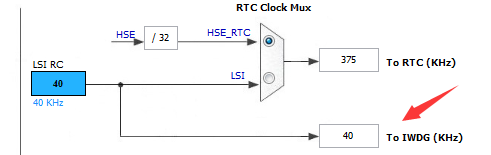
3、对看门狗进行设置,这里主要的是设置IWDG down-counter reload value。IWDG counter clock prescaler为分频系数,我现在项目设置的IWDG的时钟是40KHz,所以分频后为40000/64=625Hz,我先在项目需要使用5秒的看门狗,则625*5=3125,就是IWDG down-counter reload value的数值。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 1260
1260

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











