



 随着新基建快速推进,新兴技术如人工智能、5G、大数据等正在重塑物理世界,催生新业态新模式。然而,伴随而来的是安全风险从数字世界向实体世界的渗透。在2020腾讯全球数字生态大会上,专家们将探讨数字经济下的安全态势,建立安全新思维,用技术力量武装产业,护航数字经济。大会将发布云原生安全研究框架,探讨云上企业安全防护体系建设。
随着新基建快速推进,新兴技术如人工智能、5G、大数据等正在重塑物理世界,催生新业态新模式。然而,伴随而来的是安全风险从数字世界向实体世界的渗透。在2020腾讯全球数字生态大会上,专家们将探讨数字经济下的安全态势,建立安全新思维,用技术力量武装产业,护航数字经济。大会将发布云原生安全研究框架,探讨云上企业安全防护体系建设。
新基建快速推进,人工智能、5G、大数据等新兴技术正凝结成超乎想象的力量,让物理世界发生一次又一次翻天覆地的变化,新业态新模式不断出现,让虚拟与现实无限趋近,随之而来的安全风险正逐渐从数字世界向实体世界渗透。
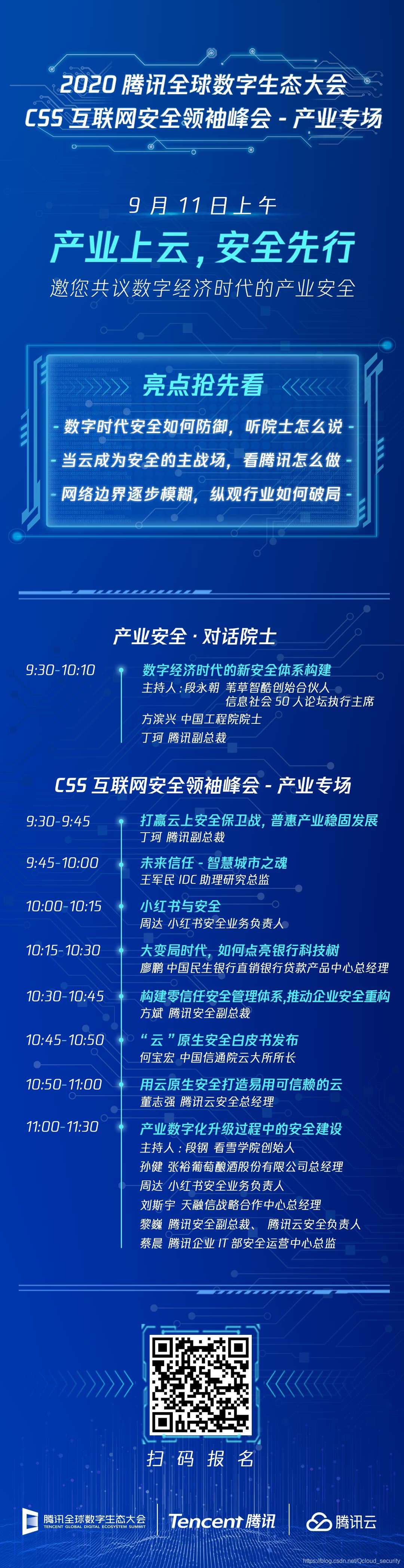
9月9日-11日,2020腾讯全球数字生态大会在云端举办,其中在9月11日,第六届CSS互联网安全领袖峰会产业专场也将以线上形式召开。届时诸多院士大咖、行业领袖将齐聚云端,共同探讨数字经济下的安全态势,建立安全新思维,用技术力量武装产业,护航数字经济蓬勃发展。

作为腾讯集团规格最高、规模最大、覆盖最广的产业互联网盛会,今年“云端大会”将会为产业发展的安全建设提供哪些新思路?
后疫情时代的安全挑战,腾讯如何破题?
2020年,新一轮智能革命正在掀起,从中央地方密集部署,到行业市场追捧,新基建发展势如破竹。与此同时,疫情的爆发,倒逼产业数字化升级全面加速,新兴行业应运而生、蓬勃发展,无人配送、在线办公、远程医疗等新业态正展现出强大的成长潜力。
随着数字经济的发展,越来越多的企业将业务上云,云端更加复杂的环境,催生出新的应用架构,并不断向轻量化、无服务化演进。在数字化为企业提质增效、创建新的业务模式的同时,网络安全的边界也在重构,传统的安全架构已无法匹配快速发展的数字经济的防护需求。
那么企业该如何建立安全新思维,以适应新的需求?在本届CSS大会上,腾讯副总裁丁珂将带来腾讯20年安全能力积累及抗疫实践验证下的全新答案。
未来,更多的安全场景将发生在云上,用云的方式来保护云,将成为安全解题新思路。云原生安全将作为云时代下企业构建安全防护体系的基础支撑,并随着技术发展和产品迭代,逐渐深入企业的内部流程和业务场景之中,进一步提升云上企业的整体安全水平。
在CSS互联网安全领袖峰会-产业专场中,腾讯安全将首次公布云原生安全研究框架,并联合中国信通院发布《云原生安全白皮书》,用顶层理论结合最新实践,拆解云原生安全能力,助力企业打造易用可信赖的云。

大咖云集,产业安全巅峰思辨
一直以来,众多顶级安全专家聚焦安全前沿议题带来的思考与分享,都是CSS大会的最大看点之一,此次CSS将再次开放平台,邀请业内大咖打造一场又一场顶级的思想盛宴。
在产业安全·对话院士专场中,大会将邀请中国工程院院士方滨兴、苇草智酷创始合伙人段永朝与腾讯副总裁丁珂开启一场“铁三角”的尖端对话,探讨数字经济时代的安全体系构建之路。

在CSS大会上,IDC助理研究总监王军民将带来智慧城市的安全议题,分享行业前沿预测;小红书和张裕葡萄酿酒等企业的相关负责人将从不同视角共议企业上云的安全之道,探讨产业数字化升级中的安全新架构,为更多企业提供安全建设新思路。

技术突破,前沿方案落地应用
在技术前瞻和落地应用上,腾讯安全副总裁方斌将带来腾讯在零信任安全架构下的最新研究及实践成果。在2020年优秀网络安全解决方案和网络安全创新产品评选活动中,腾讯零信任安全管理系统iOA基于在零信任领域的创新实践,捧回“2020年网络安全创新产品优秀奖”和“2020年网络安全创新产品最具投资价值奖”双料大奖,并荣登最具投资价值榜单第一位。
作为由腾讯主办的网络安全新生态首创平台,CSS一如既往聚合产业领域与网络安全行业的力量,在本次CSS大会上,腾讯将迎来多项重磅签约,把技术与行业深入融合,共同推进产业安全建设。
此外,在智慧交通、消费电子、智慧能源、游戏、电商、5G、产业区块链等专场中,腾讯的安全能力扎根各行各业,并输出最佳安全实践,为产业蓬勃发展保驾护航。
点击【报名】,进入官网报名。

















 20万+
20万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









