 Python爬虫学习之旅
Python爬虫学习之旅




 本文记述了作者在接到自学Python的通知后,从迷茫到掌握爬虫技能的过程。通过在线资源学习,特别是在慕课和B站上的教程,作者不仅学会了Python的基础使用,还掌握了爬虫技术,并成功完成了优快云博文的爬取任务。
本文记述了作者在接到自学Python的通知后,从迷茫到掌握爬虫技能的过程。通过在线资源学习,特别是在慕课和B站上的教程,作者不仅学会了Python的基础使用,还掌握了爬虫技术,并成功完成了优快云博文的爬取任务。
写在篇首的话:不要假装努力,结局不会陪你演戏。
暑假前,收到通知要求所有18级在暑假期间自学Python。我承认暑假没有主动认真去学习这门语言,因为要弄暑期实践表的签字就只大概的看了一下Python语言的概述。
开学之后的18级第一次例会就通知9.11号要对暑假学习的内容进行考核。听到后就顿时手忙脚乱,不知从何学起。但同学之间交流后得出一个结论爬虫是Python的核心。于是就直接在各个网站,bilibili搜索爬虫的教程。
首先,输入cmd命令查看Python是否安装成功。如下图所示
其次,在各个读书软件上大致了解了Python语言的基本使用,下面的是当时读书截的一些自认为有价值的图片。

之后,我在慕课网站,哔哩哔哩这个软件上看了关于爬虫的一些视频和教程。其中,对比较系统的总结以及爬虫有用的代码模块做了标记。如下图所示
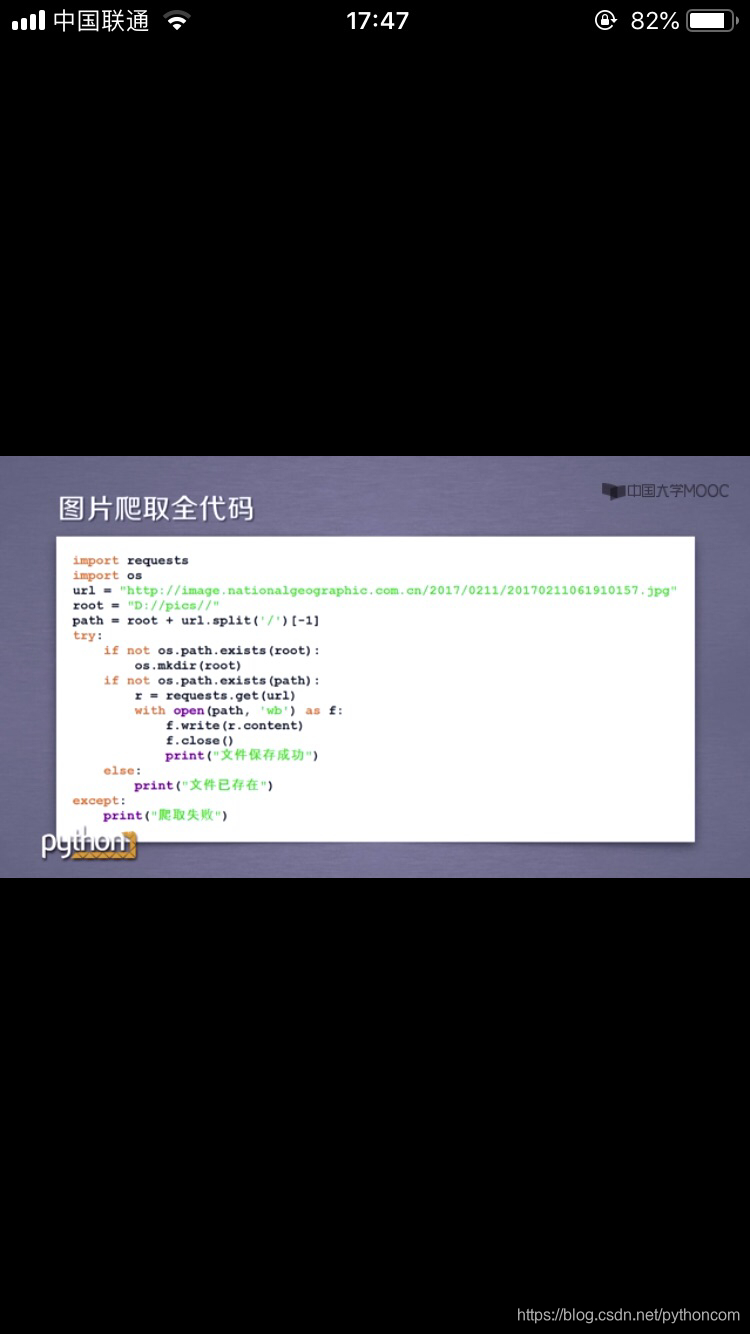
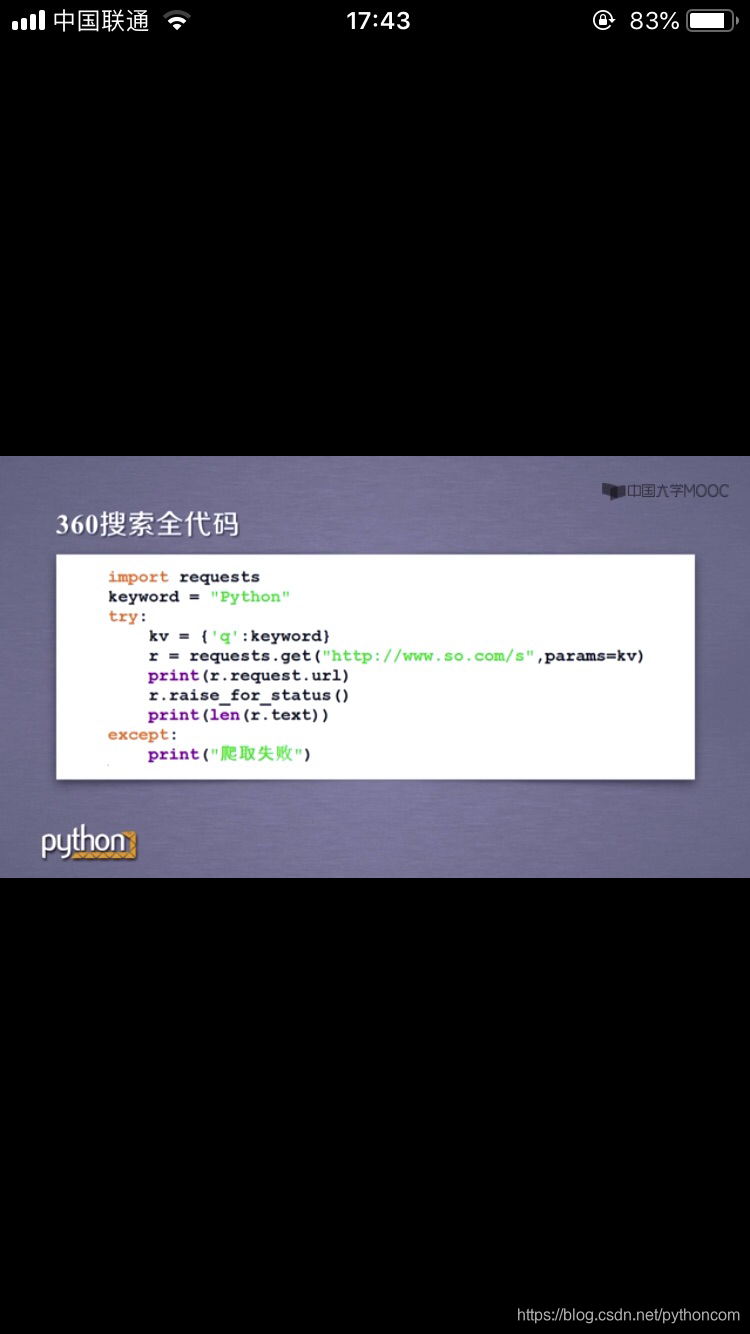
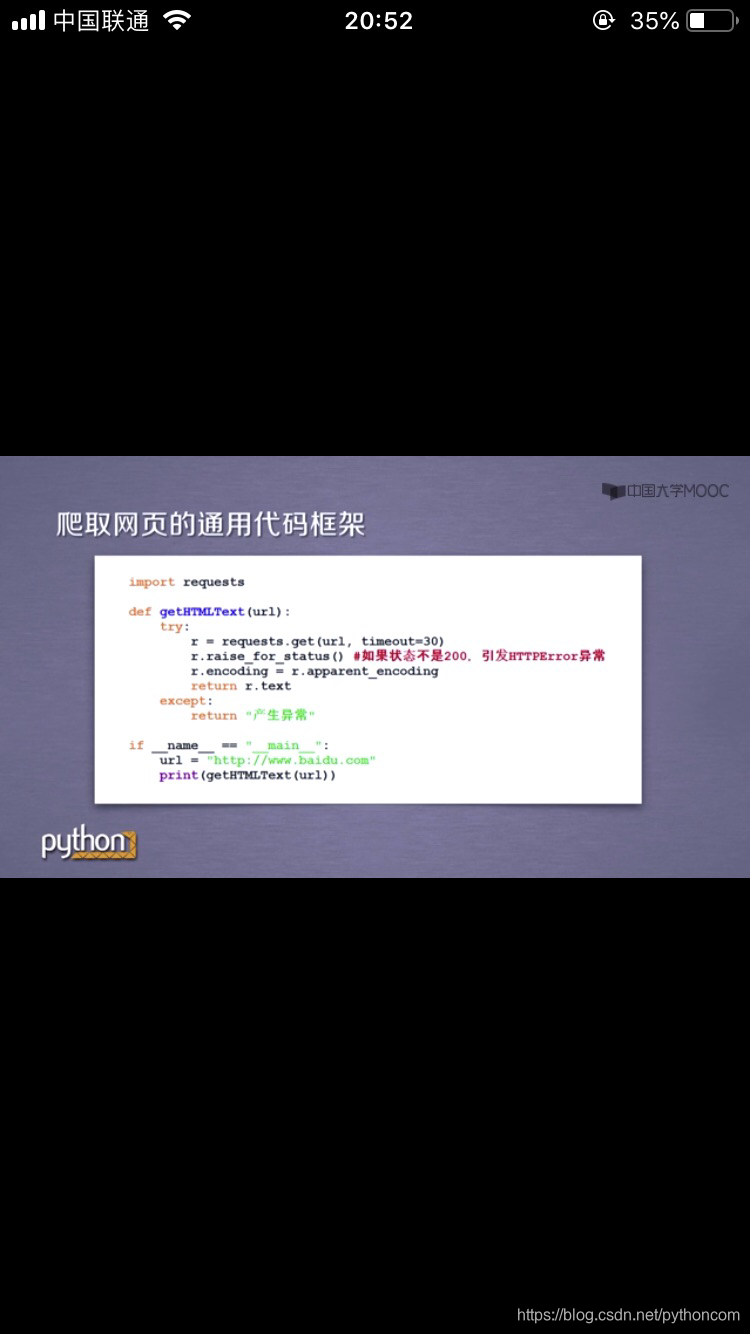
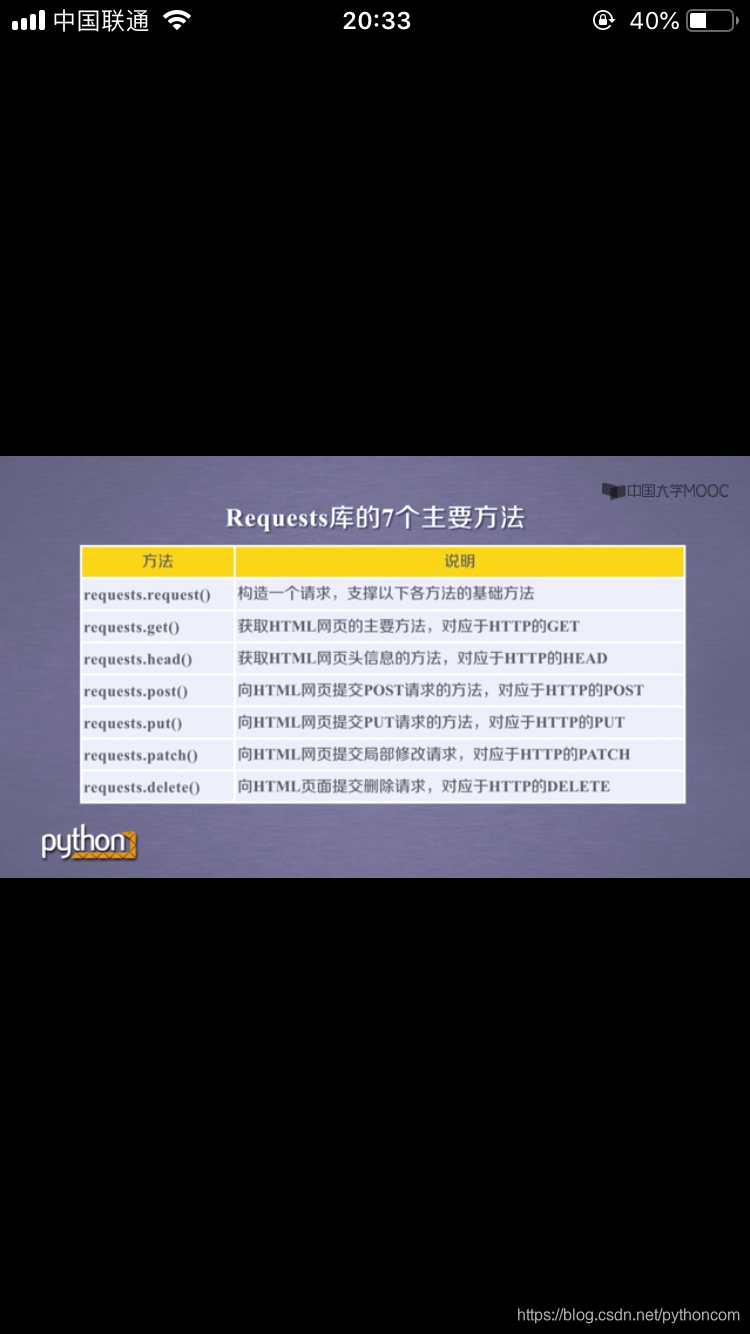
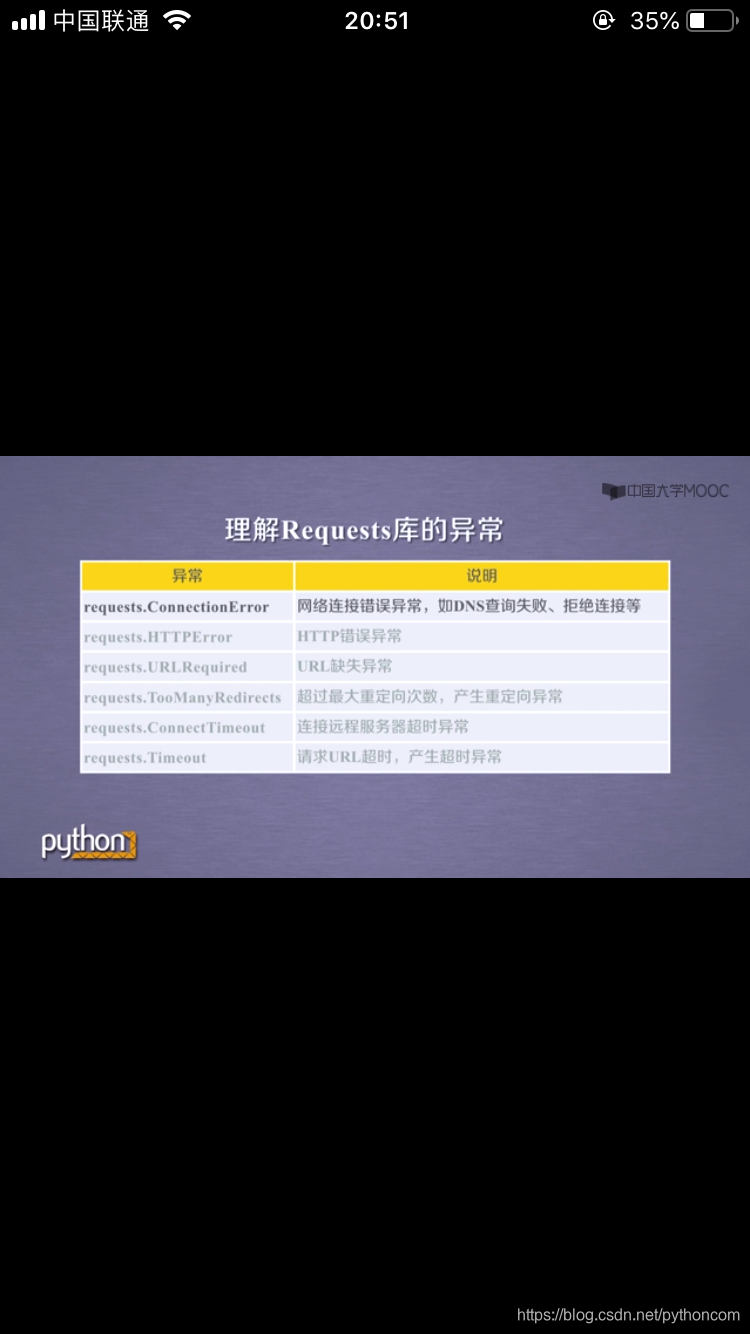
在这里,我特地对Requsets库做了记录。
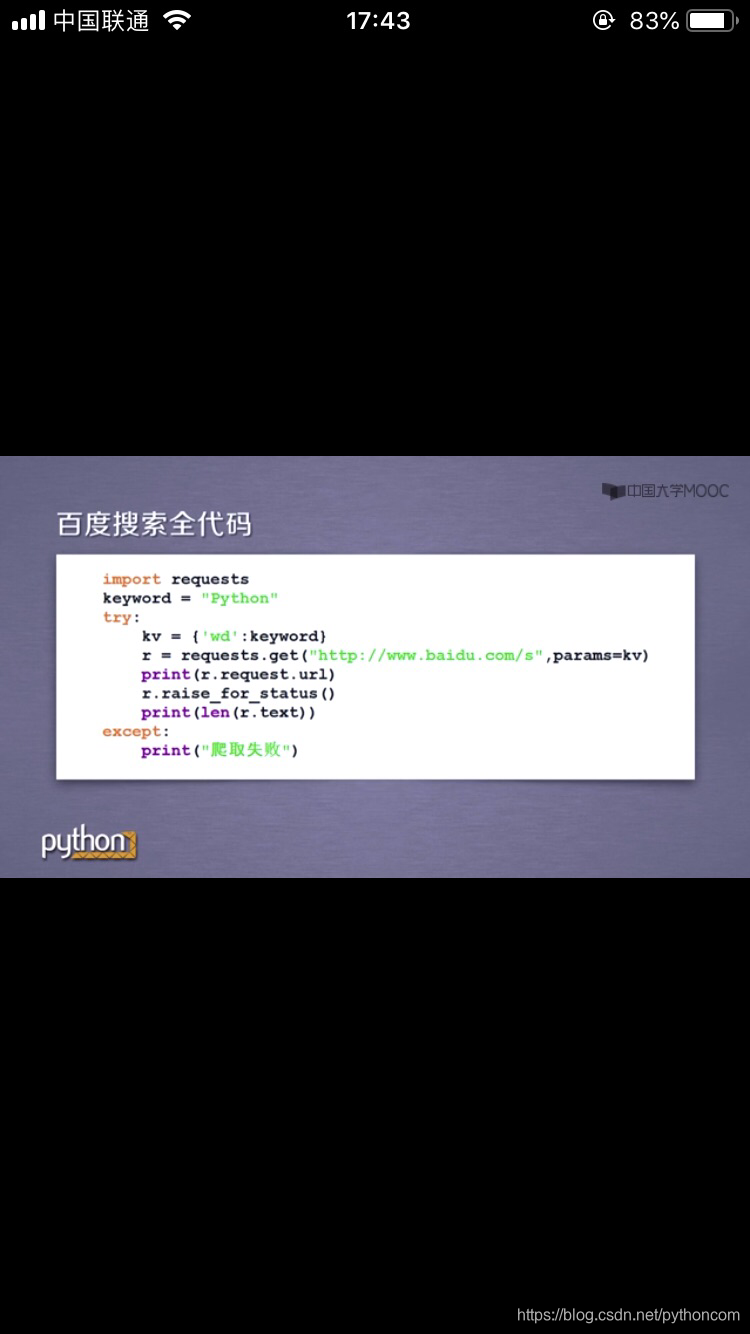
最后,在一系列的准备工作做了之后,我跟随视频里的教程对优快云博文进行了爬取,期间出了许多问题,于是就反复的看视频,最终有了以下的成果
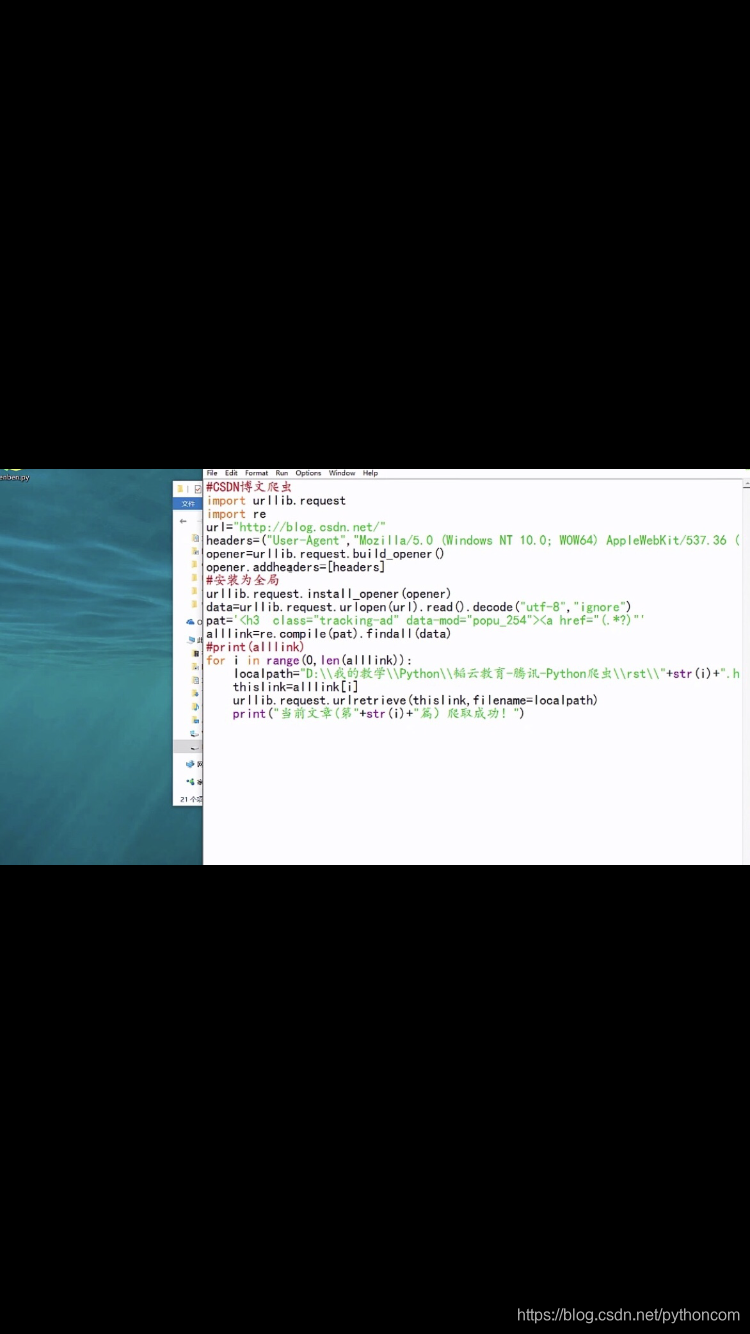
到这里,考核基本上也在当晚进行了。考核结束Python爬取的基本也就告一段落了。
之后一个又一个的任务接踵而来,计算机网络每两周的考试,数据库原理复杂的实验,数据结构与算法较强的逻辑性压的我喘不过气。实验室ACM要求每周十道题,招新工作的海报设计,试卷出题,ppt以及word制作让我每天都像个被人抽打的陀螺一样,无厘头。
这样的状态持续了几天,除了让我颓废没有什么别的改变。今天与同学沟通交流后,我的问题还是出在没有计划广泛撒网。意识到问题后,我在纸上列出了细化到每一天的计划。希望能早点改变这种困顿的状态。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









