



 本文详细介绍了如何使用PID控制算法,通过测量无人机与目标人物的水平和垂直误差,精确调整无人机的飞行角度和高度,确保始终锁定目标。通过比例(P),微分(D)和积分(I)控制,实现实时姿态校正和手势控制指令响应。
本文详细介绍了如何使用PID控制算法,通过测量无人机与目标人物的水平和垂直误差,精确调整无人机的飞行角度和高度,确保始终锁定目标。通过比例(P),微分(D)和积分(I)控制,实现实时姿态校正和手势控制指令响应。
1.无人机镜头朝向问题:如何让无人机始终锁定你这个人
我需要通过两个进程
1.识别测量出画面中心点和人体中心点的水平竖直误差
将误差发给pid,pid得到输出
2.pid的输出用在飞行控制进程调节飞行高度和角度

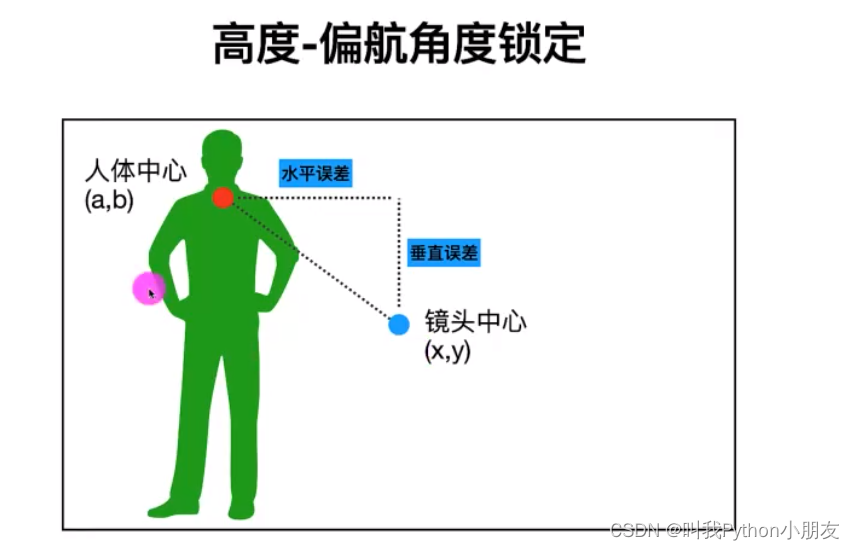
根据水平误差调整偏航角度(机头朝向)如果水平误差=0,则表示人在飞机镜头正中央
同样,通过计算竖直误差动态修正姿态
采用meidaoioe
PID
proportional 比例控制算法
P
让镜头中心与人体重心重合,假设 t0时刻竖直误差error =100
kp =-0.5
上下摇杆量 up_down_val = kp × error (上下摇杆量与竖直误差成比例)
此时计算是上下摇杆量是负数,所以飞机就会向上飞一段距离
t1时刻error =50
kp =-0.5
上下摇杆量 up_down_val 仍未负数
飞机继续往上飞
t2时刻error = -20
up_down_val 为正数,则会往下飞,直到其接近于0 为止
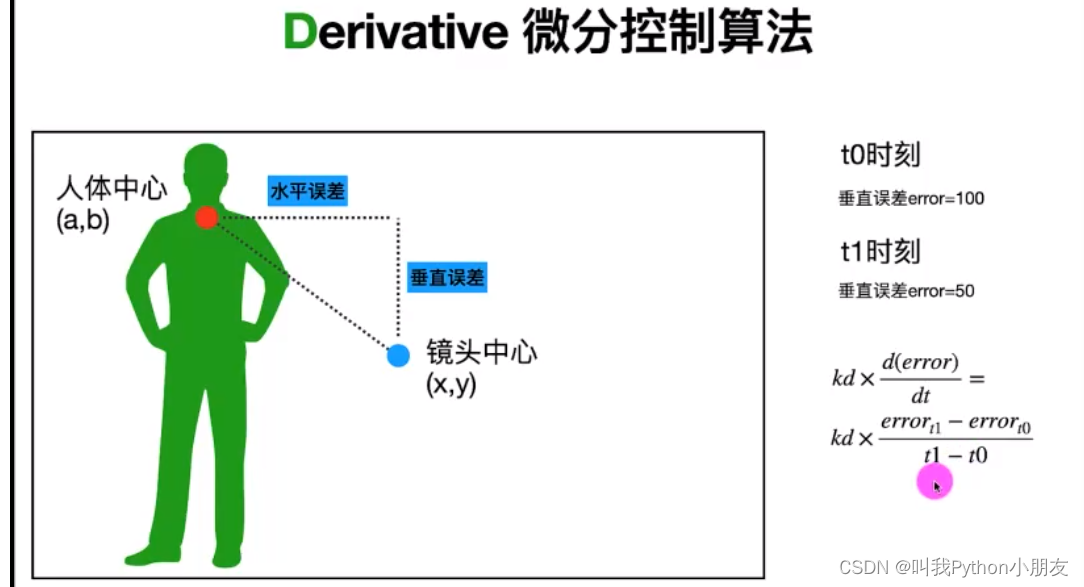
Derivative 微分控制算法
d(error)/dt == 速度
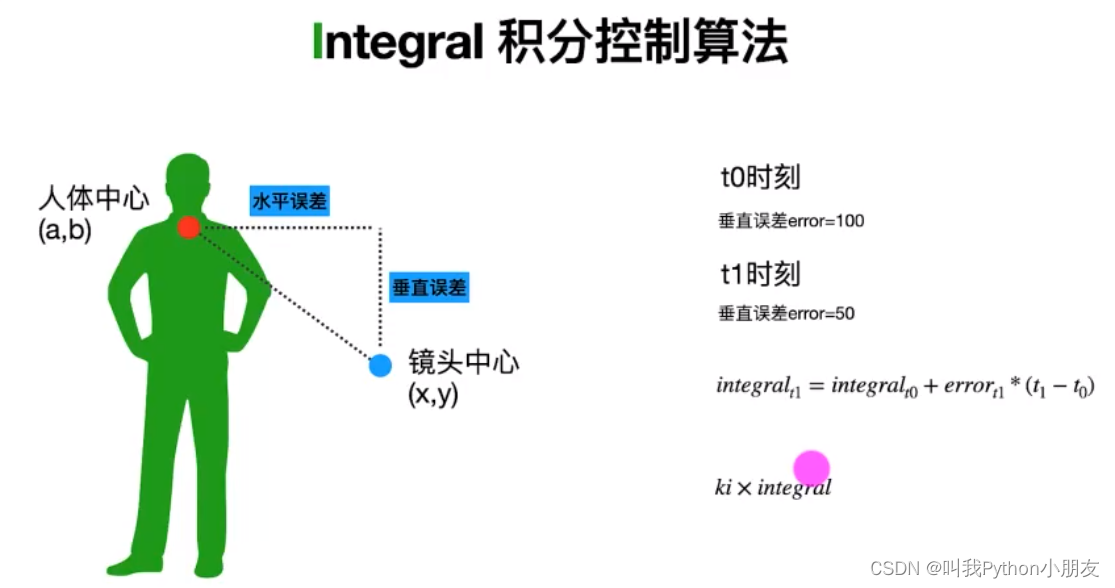
Integral 积分控制算法
PID伪代码
上一次误差error =0
积分 integral = 0
循环:
误差error = 误差测量值
积分integral = 积分 integral + 误差 error*时间差dt
导数derivative =(误差error - 上一次的误差error)/时间差dt
输出output =kp *误差error + ki *积分integral +kd *导数derivative
上一次误差error =误差 error
等待时间(dt)
进入下次循环
其他手势控制指令
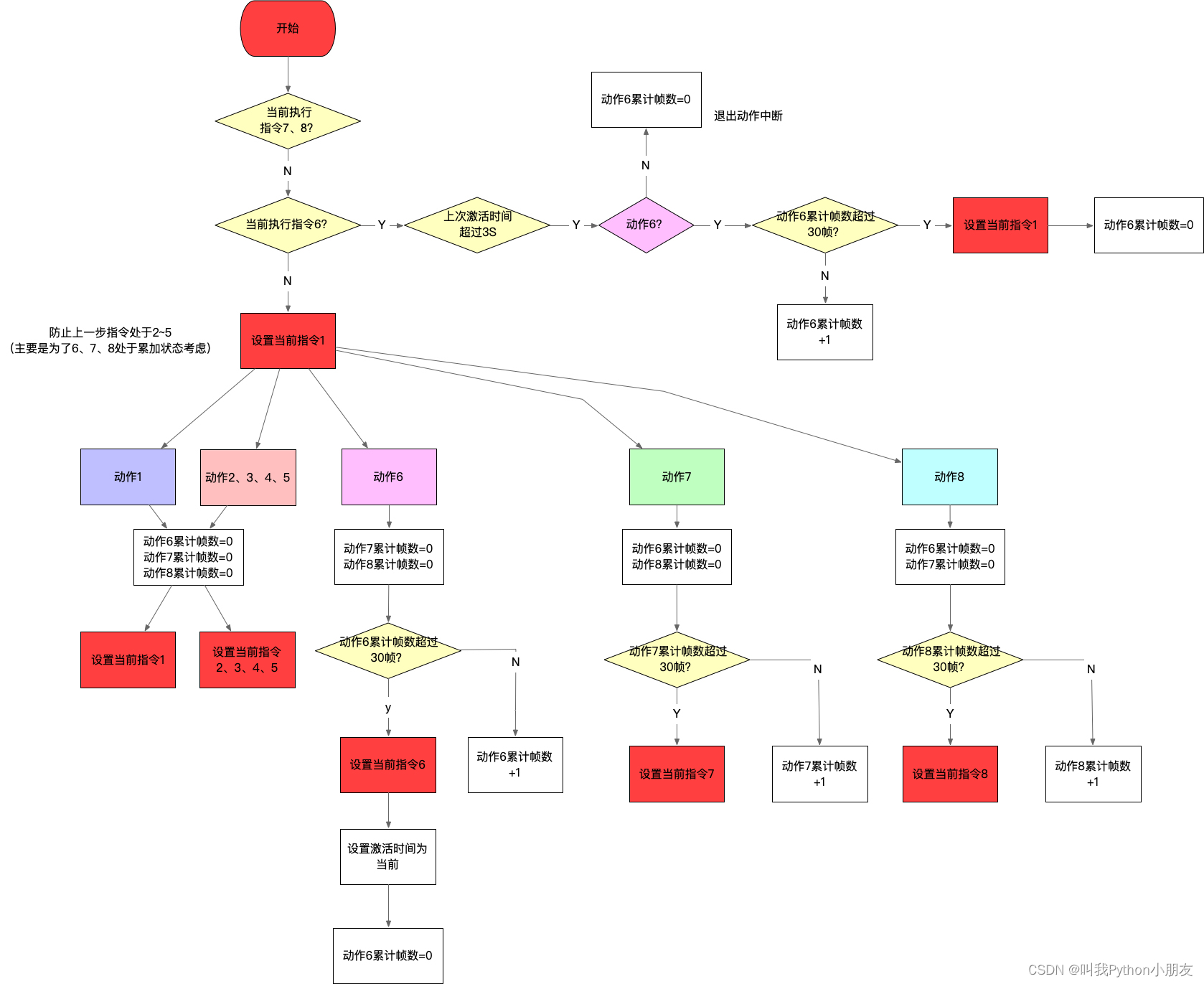
动作2345678如图所示(动作一是双手自然垂立)

2345是即刻生效的。
只要检测到2345任意一个,指令就设置成对应的数字



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









