



目录
六、反向传播算法
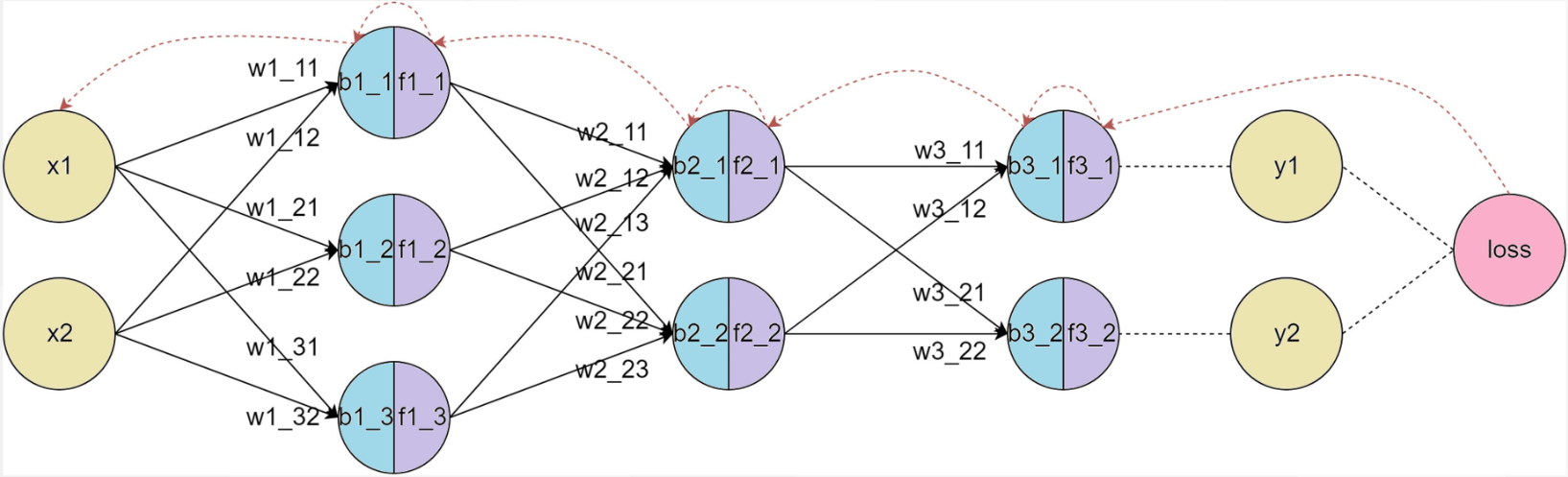
反向传播(Back Propagation,简称BP)算法是用于训练神经网络的核心算法之一,它通过计算损失函数(如均方误差或交叉熵)相对于每个权重参数的梯度,来优化神经网络的权重。
1. 前向传播
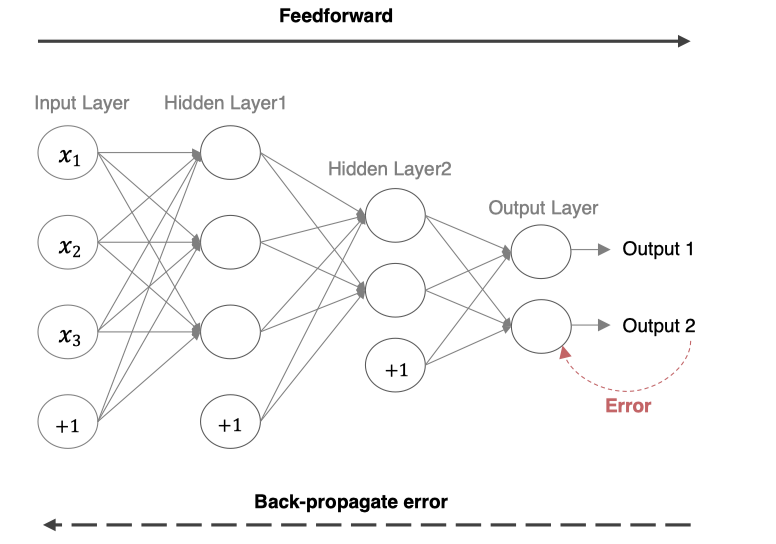
前向传播(Forward Propagation)把输入数据经过各层神经元的运算并逐层向前传输,一直到输出层为止。
1.1 数学表达
下面是一个简单的三层神经网络(输入层、隐藏层、输出层)前向传播的基本步骤分析。
1.1.1 输入层到隐藏层
给定输入 和权重矩阵
及偏置向量
,隐藏层的输出(激活值)计算如下:
将 通过激活函数 σ进行激活:
1.1.2 隐藏层到输出层
隐藏层的输出 通过输出层的权重矩阵
和偏置
生成最终的输出:
输出层的激活值 是最终的预测结果:
1.2 作用
前向传播的主要作用是:
-
计算神经网络的输出结果,用于预测或计算损失。
-
在反向传播中使用,通过计算损失函数相对于每个参数的梯度来优化网络。
2. BP基础之梯度下降算法
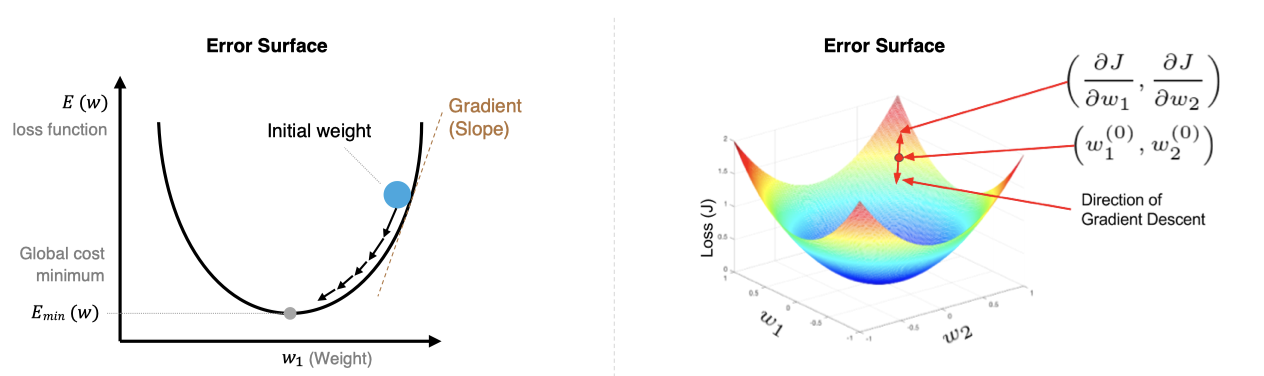
梯度下降算法的目标是找到使损失函数 最小的参数
,其核心是沿着损失函数梯度的负方向更新参数,以逐步逼近局部或全局最优解,从而使模型更好地拟合训练数据。
2.1 数学描述
简单回顾下数学知识。
2.1.1 数学公式
$$
w_{ij}^{new}= w_{ij}^{old} - \alpha \frac{\partial E}{\partial w_{ij}}
$$
其中,是学习率:
-
学习率太小,每次训练之后的效果太小,增加时间和算力成本。
-
学习率太大,大概率会跳过最优解,进入无限的训练和震荡中。
-
解决的方法就是,学习率也需要随着训练的进行而变化。
-
学习率太大,大概率会跳过最优解,进入无限的训练和震荡中。
-
解决的方法就是,学习率也需要随着训练的进行而变化。
2.1.2 过程阐述
-
初始化参数:随机初始化模型的参数
,如权重 W和偏置 b。
-
计算梯度:损失函数
对参数
,表示损失函数在参数空间的变化率。
-
更新参数:按照梯度下降公式更新参数:
,其中,
是学习率,用于控制更新步长。
-
迭代更新:重复【计算梯度和更新参数】步骤,直到某个终止条件(如梯度接近0、不再收敛、完成迭代次数等)。
2.2 传统下降方式
根据计算梯度时数据量不同,常见的方式有:
2. 2.1 批量梯度下降
Batch Gradient Descent BGD
-
特点:
-
每次更新参数时,使用整个训练集来计算梯度。
-
-
优点:
-
收敛稳定,能准确地沿着损失函数的真实梯度方向下降。
-
适用于小型数据集。
-
-
缺点:
-
对于大型数据集,计算量巨大,更新速度慢。
-
需要大量内存来存储整个数据集。
-
-
公式:
$$
\theta = \theta - \alpha \frac{1}{m} \sum_{i=1}^{m} \nabla_\theta L(\hat{y}^{(i)}, y^{(i)})
$$其中,m 是训练集样本总数,
是第 i 个样本及其标签,
是第 i 个样本预测值。
例如,在训练集中有100个样本,迭代50轮。
那么在每一轮迭代中,都会一起使用这100个样本,计算整个训练集的梯度,并对模型更新。
所以总共会更新50次梯度。
因为每次迭代都会使用整个训练 集计算梯度,所以这种方法可以得到准确的梯度方向。
但如果数据集非常大,那么就导致每次迭代都很慢,计算成本就会很高。
示例:
x = torch.randn(1000, 10)
y = torch.randn(1000, 1)
dataset = TensorDataset(x, y)
dataloader = DataLoader(dataset, batch_size=len(dataset))
model = nn.Linear(10, 1)
criterion = nn.MSELoss()
optimizer = optim.SGD(model.parameters(), lr=0.01)
epochs = 100
for epoch in range(epochs):
for b_x, b_y in dataloader:
optimizer.zero_grad()
output = model(b_x)
loss = criterion(output, b_y)
loss.backward()
optimizer.step()
print('Epoch %d, Loss: %f' % (epoch, loss.item()))
2.2.2 随机梯度下降
Stochastic Gradient Descent, SGD
-
特点:
-
每次更新参数时,仅使用一个样本来计算梯度。
-
-
优点:
-
更新频率高,计算快,适合大规模数据集。
-
能够跳出局部最小值,有助于找到全局最优解。
-
-
缺点:
-
收敛不稳定,容易震荡,因为每个样本的梯度可能都不完全代表整体方向。
-
需要较小的学习率来缓解震荡。
-
-
公式:
$$
\theta = \theta - \alpha \nabla_\theta L(\hat{y}^{(i)}, y^{(i)})
$$其中,
例如,如果训练集有100个样本,迭代50轮,那么每一轮迭代,会遍历这100个样本,每次会计算某一个样本的梯度,然后更新模型参数。
换句话说,100个样本,迭代50轮,那么就会更新100*50=5000次梯度。
因为每次只用一个样本训练,所以迭代速度会非常快。
但更新的方向会不稳定,这也导致随机梯度下降,可能永远都不会收敛。
不过也因为这种震荡属性,使得随机梯度下降,可以跳出局部最优解。
这在某些情况下,是非常有用的。
示例:
x = torch.randn(1000, 10)
y = torch.randn(1000, 1)
dataset = TensorDataset(x, y)
dataloader = DataLoader(dataset, batch_size=1)
model = nn.Linear(10, 1)
criterion = nn.MSELoss()
optimizer = optim.SGD(model.parameters(), lr=0.01)
epochs = 100
for epoch in range(epochs):
for b_x, b_y in dataloader:
optimizer.zero_grad()
output = model(b_x)
loss = criterion(output, b_y)
loss.backward()
optimizer.step()
print('Epoch %d, Loss: %f' % (epoch, loss.item()))
2.2.3 小批量梯度下降
Mini-batch Gradient Descent MGBD
-
特点:
-
每次更新参数时,使用一小部分训练集(小批量)来计算梯度。
-
-
优点:
-
在计算效率和收敛稳定性之间取得平衡。
-
能够利用向量化加速计算,适合现代硬件(如GPU)。
-
-
缺点:
-
选择适当的批量大小比较困难;批量太小则接近SGD,批量太大则接近批量梯度下降。
-
通常会根据硬件算力设置为32\64\128\256等2的次方。
-
-
公式:
$$
\theta := \theta - \alpha \frac{1}{b} \sum_{i=1}^{b} \nabla_\theta L(\hat{y}^{(i)}, y^{(i)})
$$其中,b 是小批量的样本数量,也就是
。
例如,如果训练集中有100个样本,迭代50轮。
如果设置小批量的数量是20,那么在每一轮迭代中,会有5次小批量迭代。
换句话说,就是将100个样本分成5个小批量,每个小批量20个数据,每次迭代用一个小批量。
因此,按照这样的方式,会对梯度,进行50轮*5个小批量=250次更新。
示例:
x = torch.randn(1000, 10)
y = torch.randn(1000, 1)
dataset = TensorDataset(x, y)
# 小批量梯度下降,每批次100个样本
dataloader = DataLoader(dataset, batch_size=100, shuffle=True)
model = nn.Linear(10, 1)
criterion = nn.MSELoss()
optimizer = optim.SGD(model.parameters(), lr=0.01)
epochs = 100
for epoch in range(epochs):
for b_x, b_y in dataloader:
optimizer.zero_grad()
output = model(b_x)
loss = criterion(output, b_y)
loss.backward()
optimizer.step()
print('Epoch %d, Loss: %f' % (epoch, loss.item()))
2.3 存在的问题
-
收敛速度慢:BGD和MBGD使用固定学习率,太大会导致震荡,太小又收敛缓慢。
-
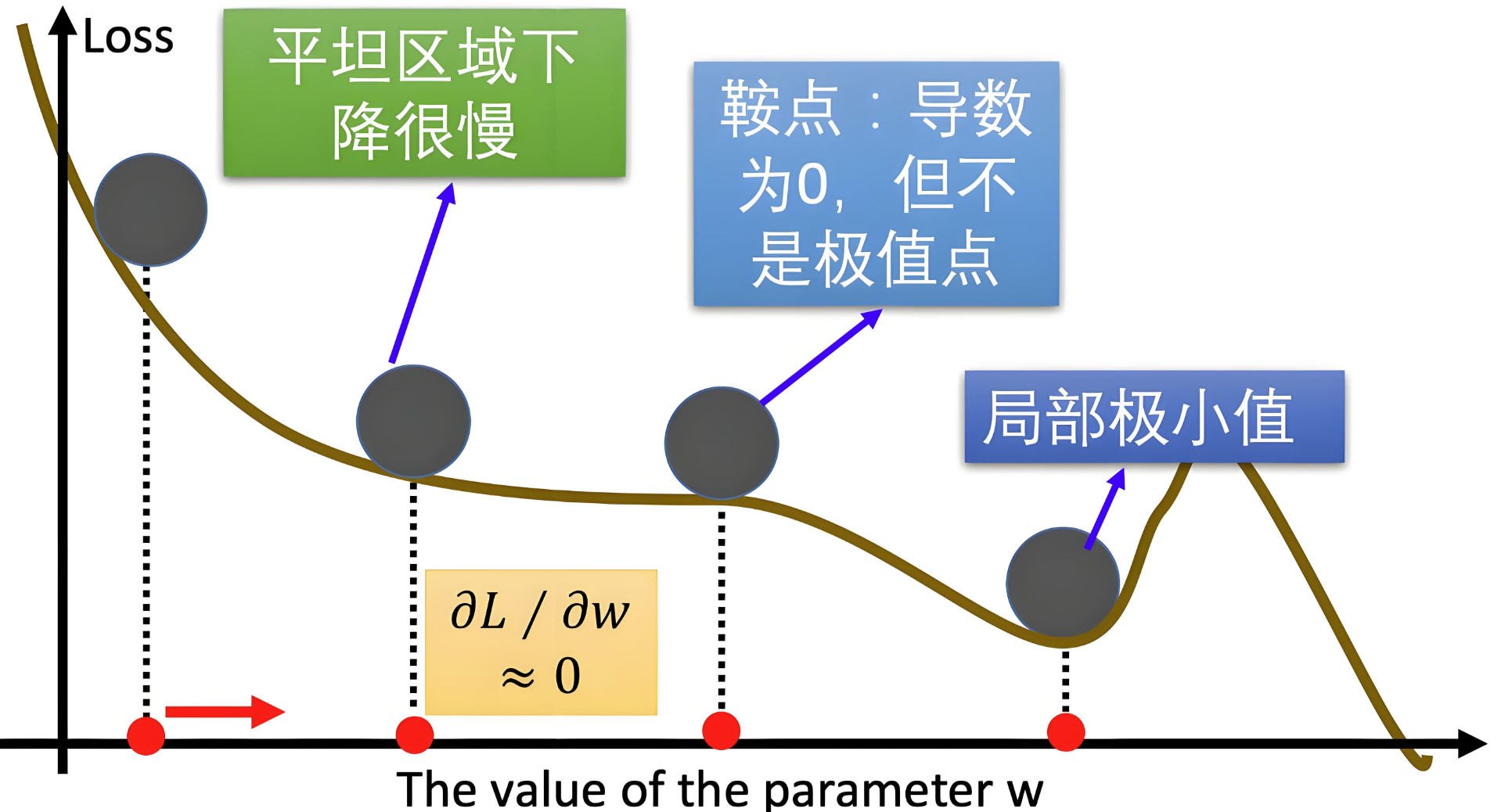
局部最小值和鞍点问题:SGD在遇到局部最小值或鞍点时容易停滞,导致模型难以达到全局最优。
-
训练不稳定:SGD中的噪声容易导致训练过程中不稳定,使得训练陷入震荡或不收敛。
2.4 优化下降方式
通过对标准的梯度下降进行改进,来提高收敛速度或稳定性。
2.4.1 指数加权平均
我们平时说的平均指的是将所有数加起来除以数的个数,很单纯的数学。再一个是移动平均数,指的是计算最近邻的N个数来获得平均数,感觉比纯粹的直接全部求均值高级一点。
指数加权平均:Exponential Moving Average,简称EMA,是一种平滑时间序列数据的技术,它通过对过去的值赋予不同的权重来计算平均值。与简单移动平均不同,EMA赋予最近的数据更高的权重,较远的数据则权重较低,这样可以更敏感地反映最新的变化趋势。
比如今天股市的走势,和昨天发生的国际事件关系很大,和6个月前发生的事件关系相对肯定小一些。
给定时间序列,EMA在每个时刻 t 的值可以通过以下递推公式计算:
当t=1时:
$$
v_0 = x_0
$$
当t>1时:
$$
v_t = \beta v_{t-1} + (1 - \beta) x_t
$$
其中:
-
是第 t 时刻的EMA值;
-
是第 t 时刻的观测值;
-
是平滑系数,取值范围为
。
公式推导:
$$
v_t = \beta v_{t-1} + (1 - \beta) x_t\\ v_{t-1} = \beta v_{t-2} + (1 - \beta) x_{t-1}\\ ...\\ 那么:\\ v_t = \beta v_{t-1} + (1 - \beta) x_t=\beta^2 v_{t-2} + \beta(1 - \beta) x_{t-1} + (1 - \beta) x_t\\ =\beta^3 v_{t-3} + \beta^2(1 - \beta) x_{t-2} + \beta(1 - \beta) x_{t-1} + (1 - \beta) x_t\\ ...\\ =\beta^t {x_0} + \beta^{t-1}(1 - \beta) x_{1} + \beta^{t-2}(1 - \beta) x_{2} + ... + (1 - \beta) x_t\\ =\beta^t {x_0} + (1 - \beta)\Sigma_{i=1}^n\beta^{t-i}x_i
$$
从上述公式可知:
-
当 β接近 1 时,
衰减较慢,因此历史数据的权重较高。
-
当 β接近 0 时,
示例
假设我们有一组数据 x=[1,2,3,4,5],我们选择 β=0.1和β=0.9 来计算 EMA。
(1)β=0.1
-
初始化:
-
计算后续值:
$$
EMA_1=0.1×1+0.9×2=1.9\\ EMA_2=0.1×1.9+0.9×3=2.89\\ EMA_3=0.1×2.89+0.9×4=3.889\\ EMA_4=0.1×3.889+0.9×5=4.8889
$$
最终,EMA 的值为 [1,1.9,2.89,3.889,4.8889]。
(2)β=0.9
-
初始化:
$$EMA_0=x_0=1$$
-
计算后续值:
$$
EMA_1=0.9×1+0.1×2=1.1\\ EMA_2=0.9×1.1+0.1×3=1.29\\ EMA_3=0.9×1.29+0.1×4=1.561\\ EMA_4=0.9×1.561+0.1×5=1.9049
$$
最终,EMA 的值为 [1,1.1,1.29,1.561,1.9049]。
可以看到:
-
当 β=0.9 时,历史数据的权重较高,平滑效果较强。EMA值变化缓慢(新数据仅占10%权重),滞后明显。
-
当 β=0.1时,近期数据的权重较高,平滑效果较弱。EMA值快速逼近最新数据(每次新数据占90%权重)。
2.4.2 Momentum
动量(Momentum)是对梯度下降的优化方法,可以更好地应对梯度变化和梯度消失问题,从而提高训练模型的效率和稳定性。它通过引入 指数加权平均 来积累历史梯度信息,从而在更新参数时形成“动量”,帮助优化算法更快地越过局部最优或鞍点。
梯度更新算法包括两个步骤:
a. 更新动量项
首先计算当前的动量项 :
其中:
-
是之前的动量项;
-
-
是当前的梯度;
b. 更新参数
利用动量项更新参数:
$$
v_{t}=\beta v_{t-1}+(1-\beta)\nabla_\theta J(\theta_t) \\ \theta_{t}=\theta_{t-1}-\eta v_{t}
$$
特点:
-
惯性效应: 该方法加入前面梯度的累积,这种惯性使得算法沿着当前的方向继续更新。如遇到鞍点,也不会因梯度逼近零而停滞。
-
减少震荡: 该方法平滑了梯度更新,减少在鞍点附近的震荡,帮助优化过程稳定向前推进。
-
加速收敛: 该方法在优化过程中持续沿着某个方向前进,能够更快地穿越鞍点区域,避免在鞍点附近长时间停留。
在方向上的作用:
(1)梯度方向一致时
-
如果梯度在多个连续时刻方向一致(例如,一直指向某个方向),Momentum 会逐渐积累动量,使更新速度加快。
-
例如,假设梯度在多个时刻都是正向的,动量
(2)梯度方向不一致时
-
如果梯度方向在不同时刻不一致(例如,来回震荡),Momentum 会通过积累的历史梯度信息部分抵消这些震荡。
-
例如,假设梯度在一个时刻是正向的,下一个时刻是负向的,动量
(3)局部最优或鞍点附近
-
在局部最优或鞍点附近,梯度可能会变得很小,导致标准梯度下降法停滞。
-
Momentum 通过积累历史梯度信息,可以帮助参数更新越过这些平坦区域。
动量方向与梯度方向一致
(1)梯度方向一致时
-
如果梯度在多个连续时刻方向一致(例如,一直指向某个方向),动量会逐渐积累,动量方向与梯度方向一致。
-
例如,假设梯度在多个时刻都是正向的,动量
(2)几何意义
-
在优化问题中,如果损失函数的几何形状是 平滑且单调 的(例如,一个狭长的山谷),梯度方向会保持一致。
-
在这种情况下,动量方向与梯度方向一致,Momentum 会加速参数更新,帮助算法更快地收敛。
动量方向与梯度方向不一致
(1)梯度方向不一致时
-
如果梯度方向在不同时刻不一致(例如,来回震荡),动量方向可能会与当前梯度方向不一致。
-
例如,假设梯度在一个时刻是正向的,下一个时刻是负向的,动量
(2)几何意义
-
在优化问题中,如果损失函数的几何形状是 复杂且非凸 的(例如,存在多个局部最优或鞍点),梯度方向可能会在不同时刻发生剧烈变化。
-
在这种情况下,动量方向与梯度方向可能不一致,Momentum 会通过积累的历史梯度信息部分抵消这些震荡,使更新路径更加平滑。
总结:
-
动量项更新:利用当前梯度和历史动量来计算新的动量项。
-
权重参数更新:利用更新后的动量项来调整权重参数。
-
梯度计算:在每个时间步计算当前的梯度,用于更新动量项和权重参数。
Momentum 算法是对梯度值的平滑调整,但是并没有对梯度下降中的学习率进行优化。
示例:
# 定义模型和损失函数
model = nn.Linear(10, 1)
criterion = nn.MSELoss()
optimizer = torch.optim.SGD(model.parameters(), lr=0.01, momentum=0.9) # PyTorch 中 momentum 直接作为参数
# 模拟数据
X = torch.randn(100, 10)
y = torch.randn(100, 1)
# 训练循环
for epoch in range(100):
optimizer.zero_grad()
outputs = model(X)
loss = criterion(outputs, y)
loss.backward()
optimizer.step()
print(f'Epoch {epoch}, Loss: {loss.item():.4f}')
2.4.3 AdaGrad
AdaGrad(Adaptive Gradient Algorithm)为每个参数引入独立的学习率,它根据历史梯度的平方和来调整这些学习率。具体来说,对于频繁更新的参数,其学习率会逐渐减小;而对于更新频率较低的参数,学习率会相对较大。AdaGrad避免了统一学习率的不足,更多用于处理稀疏数据和梯度变化较大的问题。
AdaGrad流程:
-
初始化:
-
初始化参数
和学习率
。
-
将梯度累积平方的向量
初始化为零向量。
-
-
梯度计算:
-
在每个时间步 t,计算损失函数
对参数
。
-
-
累积梯度的平方:
-
对每个参数 i 累积梯度的平方:
$$
G_{t} = G_{t-1} + g_{t}^2\\
$$其中
是累积的梯度平方和,
是第 i 个参数在时间步t 的梯度。
推导:
$$
G_{t} = G_{t-1} + g_{t}^2=G_{t-2} + g_{t-1}^2 + g_{t}^2 = ... = g_{1}^2 + ... + g_{t-1}^2 + g_{t}^2
$$
-
-
参数更新:
-
利用累积的梯度平方来更新参数:
$$
\theta_{t} = \theta_{t-1} - \frac{\eta}{\sqrt{G_{t} + \epsilon}} g_{t}
$$ -
其中:
-
-
是一个非常小的常数,用于避免除零操作(通常取
)。
-
是自适应调整后的学习率。
-
-
AdaGrad 为每个参数分配不同的学习率:
-
对于梯度较大的参数,
较大,学习率较小,从而避免更新过快。
-
对于梯度较小的参数,
可以将 AdaGrad 类比为:
-
梯度较大的参数:类似于陡峭的山坡,需要较小的步长(学习率)以避免跨度过大。
-
梯度较小的参数:类似于平缓的山坡,可以采取较大的步长(学习率)以加快收敛。
优点:
-
自适应学习率:由于每个参数的学习率是基于其梯度的累积平方和
来动态调整的,这意味着学习率会随着时间步的增加而减少,对梯度较大且变化频繁的方向非常有用,防止了梯度过大导致的震荡。
-
适合稀疏数据:AdaGrad 在处理稀疏数据时表现很好,因为它能够自适应地为那些较少更新的参数保持较大的学习率。
缺点:
-
学习率过度衰减:随着时间的推移,累积的时间步梯度平方值越来越大,导致学习率逐渐接近零,模型会停止学习。
-
不适合非稀疏数据:在非稀疏数据的情况下,学习率过快衰减可能导致优化过程早期停滞。
AdaGrad是一种有效的自适应学习率算法,然而由于学习率衰减问题,我们会使用改 RMSProp 或 Adam 来替代。
示例:
# 定义模型和损失函数
model = torch.nn.Linear(10, 1)
criterion = torch.nn.MSELoss()
optimizer = torch.optim.Adagrad(model.parameters(), lr=0.01)
# 模拟数据
X = torch.randn(100, 10)
y = torch.randn(100, 1)
# 训练循环
for epoch in range(100):
optimizer.zero_grad()
outputs = model(X)
loss = criterion(outputs, y)
loss.backward()
optimizer.step()
print(f'Epoch {epoch}, Loss: {loss.item()}')
2.4.4 RMSProp
虽然 AdaGrad 能够自适应地调整学习率,但随着训练进行,累积梯度平方会不断增大,导致学习率逐渐减小,最终可能变得过小,导致训练停滞。
RMSProp(Root Mean Square Propagation)是一种自适应学习率的优化算法,在时间步中,不是简单地累积所有梯度平方和,而是使用指数加权平均来逐步衰减过时的梯度信息。旨在解决 AdaGrad 学习率单调递减的问题。它通过引入 指数加权平均 来累积历史梯度的平方,从而动态调整学习率。
公式为:
$$
s_t=β⋅s_{t−1}+(1−β)⋅g_t^2\\θ_{t+1}=θ_t−\frac{η}{\sqrt{s_t+ϵ}}⋅gt
$$
其中:
-
是当前时刻的指数加权平均梯度平方。
-
β是衰减因子,通常取 0.9。
-
η是初始学习率。
-
ϵ是一个小常数(通常取
-
是当前时刻的梯度。
优点
-
适应性强:RMSProp自适应调整每个参数的学习率,对于梯度变化较大的情况非常有效,使得优化过程更加平稳。
-
适合非稀疏数据:相比于AdaGrad,RMSProp更加适合处理非稀疏数据,因为它不会让学习率减小到几乎为零。
-
解决过度衰减问题:通过引入指数加权平均,RMSProp避免了AdaGrad中学习率过快衰减的问题,保持了学习率的稳定性
缺点
依赖于超参数的选择:RMSProp的效果对衰减率 和学习率
的选择比较敏感,需要一些调参工作。
示例:
# 定义模型和损失函数
model = nn.Linear(10, 1)
criterion = nn.MSELoss()
optimizer = torch.optim.RMSprop(model.parameters(), lr=0.01, alpha=0.9, eps=1e-8)
# 模拟数据
X = torch.randn(100, 10)
y = torch.randn(100, 1)
# 训练循环
for epoch in range(100):
optimizer.zero_grad()
outputs = model(X)
loss = criterion(outputs, y)
loss.backward()
optimizer.step()
print(f'Epoch {epoch}, Loss: {loss.item():.4f}')
2.4.5 Adam
Adam(Adaptive Moment Estimation)算法将动量法和RMSProp的优点结合在一起:
-
动量法:通过一阶动量(即梯度的指数加权平均)来加速收敛,尤其是在有噪声或梯度稀疏的情况下。
-
RMSProp:通过二阶动量(即梯度平方的指数加权平均)来调整学习率,使得每个参数的学习率适应其梯度的变化。
Adam过程
-
初始化:
-
初始化参数
-
初始化一阶动量估计
和二阶动量估计
。
-
设定动量项的衰减率
和二阶动量项的衰减率
,通常
-
设定一个小常数 \epsilon(通常取 10^{-8}),用于防止除零错误。
-
-
梯度计算:
-
在每个时间步 t,计算损失函数
-
-
一阶动量估计(梯度的指数加权平均):
-
更新一阶动量估计:
$$
m_t = \beta_1 m_{t-1} + (1 - \beta_1) g_t
$$其中,
是当前时间步 t 的一阶动量估计,表示梯度的指数加权平均。
-
-
二阶动量估计(梯度平方的指数加权平均):
-
更新二阶动量估计:
$$
v_t = \beta_2 v_{t-1} + (1 - \beta_2) g_t^2
$$其中,
-
-
偏差校正:
由于一阶动量和二阶动量在初始阶段可能会有偏差,以二阶动量为例:
在计算指数加权平均时,初始化
,那么
,得到
,显然得到的
会小很多,导致估计的不准确,以此类推:
根据:
,把
,导致
远小于
和
,所以
所以这个估计是有偏差的。
使用以下公式进行偏差校正:
$$
\hat{m}_t = \frac{m_t}{1 - \beta_1^t} \\ \hat{v}_t = \frac{v_t}{1 - \beta_2^t}
$$其中,
和
是校正后的一阶和二阶动量估计。
推导:
假设梯度
是一个平稳的随机变量,其期望为:
$$
E(g_t)=μ
$$根据指数加权平均的递推公式,我们可以递推计算
的期望。
当t=1:
$$
m_1=β⋅m_0+(1−β)⋅g_1
$$假设
,所以:
$$
m_1=(1−β)⋅g_1
$$取期望:
$$
E(m1)=(1−β)⋅E(g_1)=(1−β)⋅μ
$$当t=2:
$$
m_2=β⋅m_1+(1−β)⋅g_2
$$代入
:
$$
m_2=β⋅(1−β)⋅g_1+(1−β)⋅g_2
$$取期望:
$$
E(m_2)=β⋅(1−β)⋅E(g_1)+(1−β)⋅E(g_2)=β(1−β)⋅μ+(1−β)⋅μ=(1−β^2)⋅μ
$$当t=3:
$$
m_3=β⋅m_2+(1−β)⋅g_3
$$代入
:
$$
m_3=β⋅[β(1−β)⋅g_1+(1−β)⋅g_2]+(1−β)⋅g_3
$$展开:
$$
m_3=β^2(1−β)⋅g_1+β(1−β)⋅g_2+(1−β)⋅g_3
$$取期望:
$$
E(m_3)=β^2(1−β)⋅μ+β(1−β)⋅μ+(1−β)⋅μ=(1−β^3)⋅μ
$$通过递推可以发现,对于任意时刻 t,
$$
E(m_t)=(1−β^t)⋅μ
$$通过上述公式我们发现m_t的期望与梯度期望相差了
倍,我们想要找到一个修正后的
,使:
所以:
$$
E(m_t)=(1−β^t)⋅μ=(1−β^t)⋅E(\hat{m_t})
$$进行缩放:
$$
m_t=(1−β^t)⋅\hat{m_t}
$$得出:
$$
\hat{m_t}=\frac{m_t}{1−β^t}
$$ -
参数更新:
-
使用校正后的动量估计更新参数:
$$
\theta_{t+1} = \theta_t - \frac{\eta}{\sqrt{\hat{v}_t} + \epsilon} \hat{m}_t
$$
-
优点
-
高效稳健:Adam结合了动量法和RMSProp的优势,在处理非静态、稀疏梯度和噪声数据时表现出色,能够快速稳定地收敛。
-
自适应学习率:Adam通过一阶和二阶动量的估计,自适应调整每个参数的学习率,避免了全局学习率设定不合适的问题。
-
适用大多数问题:Adam几乎可以在不调整超参数的情况下应用于各种深度学习模型,表现良好。
缺点
-
超参数敏感:尽管Adam通常能很好地工作,但它对初始超参数(如
-
过拟合风险:由于Adam会在初始阶段快速收敛,可能导致模型陷入局部最优甚至过拟合。因此,有时会结合其他优化算法(如SGD)使用。
2.5 总结
梯度下降算法通过不断更新参数来最小化损失函数,是反向传播算法中计算权重调整的基础。在实际应用中,根据数据的规模和计算资源的情况,选择合适的梯度下降方式(批量、随机、小批量)及其变种(如动量法、Adam等)可以显著提高模型训练的效率和效果。
Adam是目前最为流行的优化算法之一,因其稳定性和高效性,广泛应用于各种深度学习模型的训练中。Adam结合了动量法和RMSProp的优点,能够在不同情况下自适应调整学习率,并提供快速且稳定的收敛表现。
示例:
# 定义模型和损失函数
model = nn.Linear(10, 1)
criterion = nn.MSELoss()
optimizer = torch.optim.Adam(model.parameters(), lr=0.01, betas=(0.9, 0.999), eps=1e-8)
# 模拟数据
X = torch.randn(100, 10)
y = torch.randn(100, 1)
# 训练循环
for epoch in range(100):
optimizer.zero_grad()
outputs = model(X)
loss = criterion(outputs, y)
loss.backward()
optimizer.step()
print(f'Epoch {epoch}, Loss: {loss.item():.4f}')
技术分享是一个相互学习的过程。关于本文的主题,如果你有不同的见解、发现了文中的错误,或者有任何不清楚的地方,都请毫不犹豫地在评论区留言。我很期待能和大家一起讨论,共同补充更多细节。

















 8万+
8万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









