



 本文探讨了SVPWM(空间电压矢量脉宽调制)技术,解释了直流母线电压利用率的概念,指出SVPWM中由于中性点浮动导致的线电压与相电压的关系。介绍了Clark和Park变换在三相解耦中的作用,强调了坐标变换在逆变器控制中的重要性,并详细阐述了SVPWM的计算过程,包括确定区域角和合成矢量的选取。
本文探讨了SVPWM(空间电压矢量脉宽调制)技术,解释了直流母线电压利用率的概念,指出SVPWM中由于中性点浮动导致的线电压与相电压的关系。介绍了Clark和Park变换在三相解耦中的作用,强调了坐标变换在逆变器控制中的重要性,并详细阐述了SVPWM的计算过程,包括确定区域角和合成矢量的选取。
直流母线电压利用率定义:
直流母线电压利用率=输出线电压波形幅值/直流母线电压。
不用相电压定义,是因为Y接时N点是在浮动的,Δ接时没有N点,所以N点是虚的。
SPWM:线电压幅值是相电压幅值的sqrt(3)。相电压最大幅值为Udc/2。中性点是固定的,不会动。
SVPWM:因为中性点N在浮动,相电压波形对于地(Vdc的负端)来说是马鞍波,所以不满足相线之间的sqrt(3)关系。N点的浮动相当于三次谐波的波形。
线电压最大幅值为Udc,相电压最大幅值为2/3Udc。
Clark变换:
Clark变换是为使相互耦合的三相解耦成两相电路。
ABC三相有时间差:A超前于B,B超前于C。各相差120°
ABC三相位于电机上的定子电角度有位置差:位置上有A超前B,B超前C,也各相差120°。
所以有以下式子,以下式子表示为合成的旋转电压的幅值。
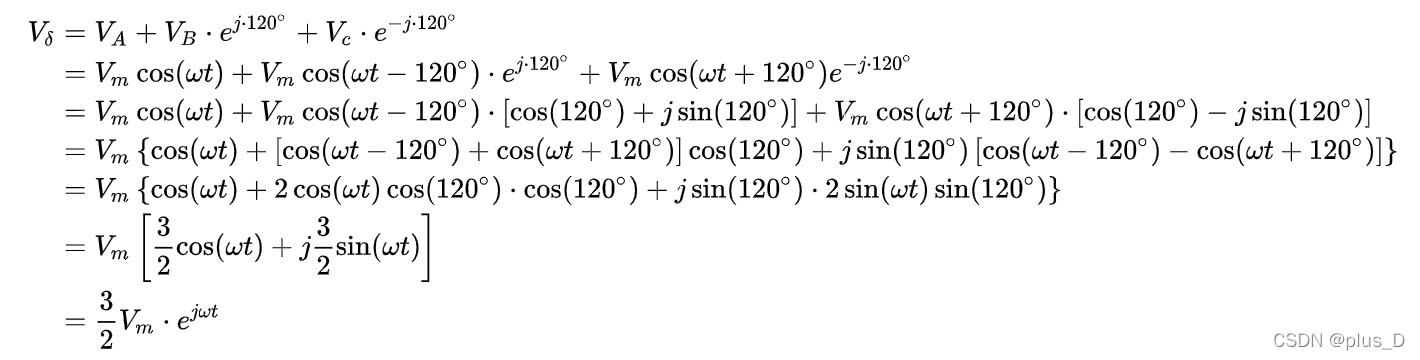
当分解在α轴和β轴就有Clark变换:3/2变换

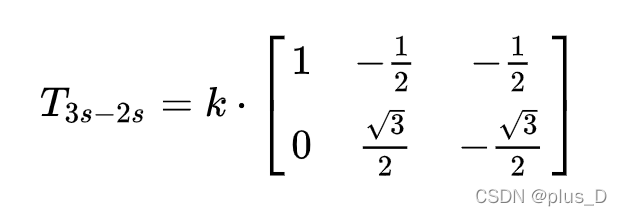
等幅值变换k=23,等功率变换k=23,等幅值变换是为了使旋转电压的幅值等于ABC相电压的幅值。等功率变换就是为了使输出功率相等。
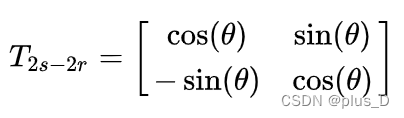
Park变换:
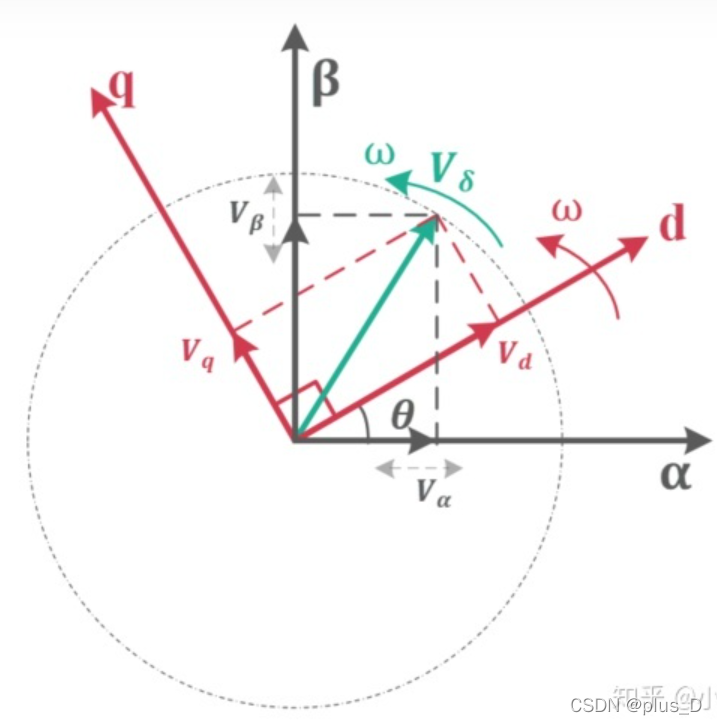
从静止坐标到旋转坐标。
坐标变换个人愚见:
关于park变换的角度θ该怎么去取,后面仔细想了下,如果需要跟随电网的角度的话,就需要用同一种变换方式,换算出电网的相角,电流的计算方式应与电网换算角度的方式相同,即电流电压坐标变换应在同一种变换下,d轴与α轴相差θ角(电网角度)。
我们逆变器控制通常采用Id可以控制有功分量,在Clark变换时采用等幅值变换,d轴的大小可代表为相电压的幅值。Iq可以控制无功分量,如果Id与Iq一起控制时,合成电流的幅值也会发生相应的变化。
SVPWM的计算:
通过环路运算后可以得到Id与Iq的参考值,通过平方和。即可得到所需的矢量的幅值。此时,Vref的角度发生了变化,不再是电网的角度,所以代入SVPWM时要算出区域角,即Vref与α的夹角。
然后根据不同区域,选择合成矢量。就可以推出作用矢量的长度,根据作用长度就可以推出作用时间。
如果根据等幅值变换,正六边型的轴线长度,为2/3Vdc。剩下的就是解三角形了。
参考资料:
(23条消息) SVPWM算法原理及详解_qlexcel的专栏-优快云博客_svpwm
SVPWM调制中的6个非零基础电压矢量的幅值到底是Udc还是2/3Udc ? 电压利用率为什么是1?clark变换的系数? - 知乎 (zhihu.com)
4种派克(Park)变换、克拉克(Clark)变换与基于dq轴解耦的双闭环控制之间的关系(一) - 知乎 (zhihu.com)

















 2144
2144




 到【灌水乐园】发言
到【灌水乐园】发言







