






步态文件:
1. 步态类型
list
{
[0] stance 静止
[1] trot 快走,一种快速、稳定的交替对角步态
[2] standing_trot 在交替的步伐中插入静止阶段,增加稳定性
[3] flying_trot 在交替的步伐中插入腾空阶段,增加速度
[4] pace 同侧步态,左右两条腿交替着地,常用于节能的慢速运动
[5] standing_pace 每一对同侧步伐之间插入静止阶段,进一步增加稳定性
[6] dynamic_walk 动态行走步态,步伐之间切换频繁
[7] static_walk 静态行走,保证在每一步中总有足够的脚支撑地面
[8] amble 轻松步态,步伐轻盈,适用于休闲或低速移动
[9] lindyhop 一种更加富有表现力的步态,可以模仿跳舞动作,强调节奏感
[10] skipping 跳跃步态,通常用于快速移动或模仿人类跳跃,结合着地与腾空的步伐
[11] pawup 用于调整机器人的姿态或准备跨越障碍
}2. 步态相位
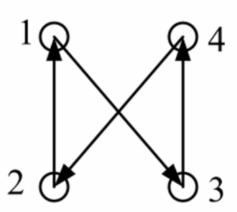
2.1 trot
trot
{
modeSequence
{
[0] LF_RH
[1] RF_LH
}
switchingTimes
{
[0] 0.0
[1] 0.35
[2] 0.70
}
}1、3着地,2、4抬起,持续 [1] - [0] = 0.35时间
2、4着地,1、3抬起,持续 [2] - [1] = 0.35时间
重复
2.2 dynamic_walk
dynamic_walk
{
modeSequence
{
[0] LF_RF_RH
[1] RF_RH
[2] RF_LH_RH
[3] LF_RF_LH
[4] LF_LH
[5] LF_LH_RH
}
switchingTimes
{
[0] 0.0
[1] 0.2
[2] 0.3
[3] 0.5
[4] 0.7
[5] 0.8
[6] 1.0
}
}1 4
3持续 [1] - [0] = 0.2时间
提供三角支持,确保动态稳定
4
3持续 [2] - [1] = 0.1时间
两脚支撑,在步态中转移重心
4
2 3持续 [3] - [2] = 0.2时间
三脚支撑,重心逐步转移到另一侧
1 4
2持续 [4] - [3] = 0.2时间
三脚支撑,继续重心转移
1
2持续 [5] - [4] = 0.1时间
两脚支撑,重心转移到左侧
1
3持续 [6] - [5] = 0.2时间
三脚支撑,准备切换到下一个步态阶段


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









