




 本文详细介绍了STM32微控制器中TIM3和TIM2定时器的配置过程,包括时钟配置、GPIO配置、预分频器设置、计数模式设定及中断配置等关键步骤。通过具体代码示例,深入解析了如何实现PWM输出和定时中断。
本文详细介绍了STM32微控制器中TIM3和TIM2定时器的配置过程,包括时钟配置、GPIO配置、预分频器设置、计数模式设定及中断配置等关键步骤。通过具体代码示例,深入解析了如何实现PWM输出和定时中断。
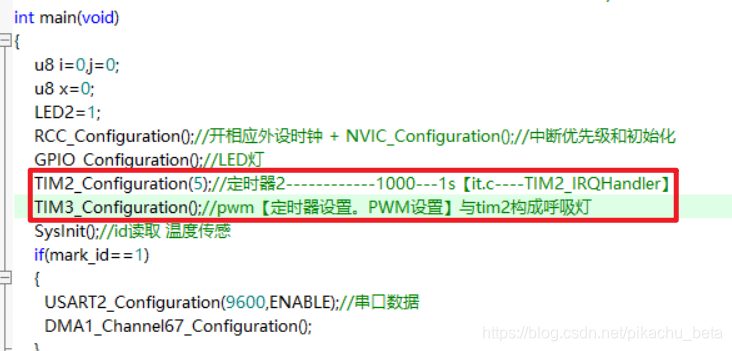
主函数
TIM3_Configuration
void TIM3_Configuration(void)
{
GPIO_InitTypeDef GPIO; //声明一个结构体变量
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
/*-----------RCC -------------*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);//开启定时器时钟
/*-----------GPIO -------------*/
//pwm---led灯 PB5
GPIO.GPIO_Pin = GPIO_Pin_5; //选择PX.5
GPIO.GPIO_Speed = GPIO_Speed_50MHz; //管脚频率为50MHZ
GPIO.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOB,&GPIO); //初始化GPIOB寄存器
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);//重映射
/*-----------Configures TIM3 -------------*/
TIM_DeInit(TIM3);
TIM_TimeBaseStructure.TIM_Prescaler = 0 ; //72M
TIM_TimeBaseStructure.TIM_CounterMode =</ 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 6258
6258

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











