




一、环境配置方法
基本要求: Python版本>=3.8 ; Halcon版本 >=20.11
1)首先创建一个python版本大于3.8的基础环境
2)然后查看自己的halcon的版本,在该环境下安装halcon
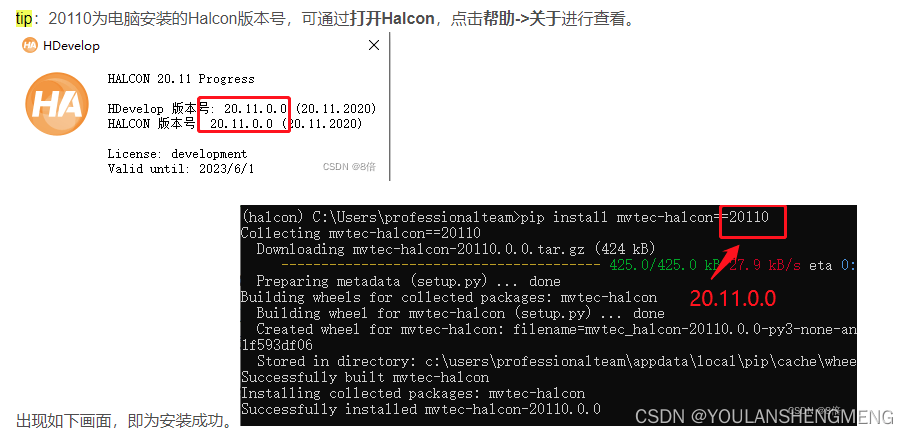
如图所示,版本是20110,执行以下语句,完成halcon的安装
pip install mvtec-halcon==20110
安装成功后,出现如下的图像:
3)将halcon相关的dll放在python.exe所在的文件夹下。halcon的相关dll可以在你安装的halcon的文件位置获得。拷贝以下命名的dll,进行拷贝,放置在创建的python环境中python.exe所在的位置。
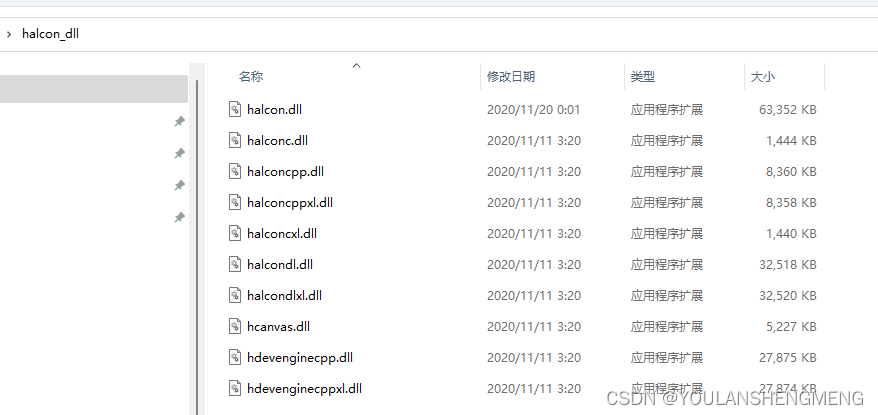
拷贝后,如图所示:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









