 SSD-TDMA在VANET中的通信优化
SSD-TDMA在VANET中的通信优化




IEEE 802.11p MAC 与频谱感知方案在使用智能交通系统的 VANET 中的可靠性
摘要
在拥堵区域,需要足够的频谱来传输安全与非安全消息。基于分布式时分多址的频谱感知(SSD-TDMA)以分布式方式接入信道以避免碰撞,并利用循环自相关函数在车辆级别检测广播信号的能量。所有信息被聚合以支持在车辆环境中进行数据传输的决策。该频谱感知方法用于感知广播信号,以确定频谱的占用状态以及授权频段的可用性。使用 ns2 仿真器,在城市拥堵场景下评估了该方法在路侧单元覆盖区域内基于车辆进入时间戳进行分布式时隙分配的频谱感知技术性能。提出的 SSD-TDMA 方法通过降低的数据包约束带来的延迟和开销,证明了其在车载自组织网络(VANET)中实现有效且可靠的通信。
关键词 : IEEE 802.11p;媒体访问控制协议;CSMA/CA;载波侦听多路访问/冲突避免;G-TDMA;集中式时分多址;SSD-TDMA;基于分布式时分多址的频谱感知;循环自相关函数;循环平稳特征检测。
引言
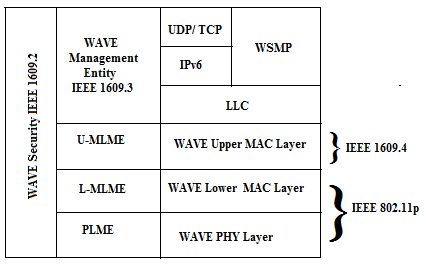
在车载网络环境中,每辆移动车辆均被视为移动区域节点,这些节点无需任何接入点即可构建移动网络。车载自组织网络(VANETs)是分布式且自包含的,同时包含车对车(V2V)和车对路侧单元(V2I)通信(Li 和 Wang,2007)。在车载环境无线接入(WAVE)技术中,通过传播用于测量距离信息的 Hello 消息,可支持安全与非安全应用的单跳和多跳广播。车辆可通过专用短程通信(DSRC)中的许可多信道进行通信。因此,单跳和多跳广播无需特定目的地址,其作用是在特定区域内扩散信息。全球定位系统(GPS)和传感器设备可分析地理周围信息,并在车辆之间共享这些信息。因此,单播转发需要目的地址以提高道路感知能力。车辆配备有车载单元收发器、传感器和 GPS,这些设备通过高带宽信道以无线或有线网络方式与路侧单元(RSU)通信。IEEE 802.11p 覆盖所有 ISO 层,美国联邦通信委员会分配了 5.9 GHz 频率(IEEE 标准 802.11p-2010,2013),许可频率范围为 5.85–5.925 GHz,并作为 IEEE 802.11 标准修正案。通过为安全应用分配不相交时隙,以及为车载自组织网络(VANETs)中不可预测的簇密度分配不相交时隙,可减少碰撞。在 IEEE 802.11p 中,基于介质访问控制(MAC)协议的时分多址(TDMA)能够充分利用七个各 10 MHz 的信道,且 WAVE 协议栈如图1所示。
无线标准 IEEE 802.11p 协议使用物理层和底层 MAC 层,而 IEEE 1609 系列由 IEEE P1609.4 组成,利用上层 MAC 层支持多信道操作,如 Miao 等(2011)所述。
在文献研究中,现有 MAC 方法 CSMA/CA 在 IEEE 802.11p 中的行为未使用 RTS/CTS 进行信道接入,从而导致隐藏终端问题,在高密度区域增加了碰撞。一旦发生碰撞,将根据碰撞次数进行随机退避并重传。这会造成更大延迟、降低吞吐量,并在无线自组织网络中消耗更多能量(Bilstrup 等,2010;Nguyen 等,2013)。
因此,第二种 MAC 方法广义时分多址(G-TDMA)通过簇头(CH)以集中式方式分配时隙,该簇头是根据相同速度、相同方向、多跳范围和最长邻居列表等加权参数选出的,以减少碰撞和隐藏双向场景中的终端问题,在动态拓扑期间增加了簇形成、簇头选择和簇头维护的开销(Almalog 等人,2012;Omar 等人,2013)。
在 WAVE 技术中,提出了一种基于分布式时分多址的频谱感知(SSD-TDMA),该方法可识别空闲信道,并分配覆盖区域的基于时隙的时间戳,从而避免双向场景中的碰撞。所提出的方法通过在双向场景中采用分布式时隙分配方式寻找可用的授权频段,以实现高投递率、更少的数据包丢失和更少的控制开销,支持城市场景中双向的高且不平衡的交通流量。物理层采用 OFDM(正交频分复用)技术,在媒体访问控制层上引入 TDMA 技术以避免数据包碰撞。当车辆进入路侧单元覆盖区域时,每辆车根据其在覆盖区域内的消息生成时间戳以分布式方式分配时隙。例如,节点 A、B、C、D、E、F、G、H、I 和 J 根据进入路侧单元覆盖区域的时间戳获取时隙,如图2所示。

如果新节点进入传输范围,则分配空闲时隙,而不是重新分配之前节点的时隙。
1.1 相关工作
每辆车测量广播信号的能量,并将信息存储在车辆数据库中。路侧单元(RSU)从每辆车收集信息并汇总至 RSU 数据库(Di Felice 等,2011)。每辆车通过循环自相关方法测量广播信号的能量,以此判断空闲信道。MAC 子层动态生成支持双向通信的帧。所有关于频谱可用性的统计信息均存储在 RSU 数据库中,并广播给其覆盖区域内其他车辆。因此,所提出的系统将信号聚合为能量信息以寻找可用信道,媒体访问控制层可根据车辆进入覆盖区域的时间戳,在分布式基础上支持不同的时隙,从而减少干扰并避免自组织网络中的碰撞。
2 提出的系统
该系统利用信号到能量转换的循环自相关函数(CAF)来检测忙和非忙信道,并使用 802.11p MAC 支持双向通信以减少干扰。IEEE 802.11p MAC 在时隙化的时间帧上运行,为固定数据包分配时隙。每个节点根据车辆进入覆盖区域的时间戳以及帧信息由 MAC 层分配时隙。所有车辆在其覆盖区域内接收警报并发送至路侧单元(RSU),否则所有信息将在进入覆盖区域后发送。每辆车辆感知广播信号,并通过循环自相关函数(CAF)将信号转换为能量,RSU 在频谱稀缺区域分配可用信道,从而缓解频谱稀缺问题。每辆车辆可以进行通信,并获取有关簇 ID 和可用空闲频谱的统计信息。RSU 的数据库包含消息、簇 ID 和信道可用性信息(Wang 和 Ho,2010;Ye 等,2008)。基于循环自相关函数(CAF)的频谱感知将信号转化为能量检测方法,用以检测授权用户的存在与否。
3 信息模型
参数邻居列表、两节点之间的距离、方向、链路稳定性或连通性以及节点加权分数用于从源到目的找出最优转发节点。每辆车在两跳通信范围内的邻居之间交换时隙信息,并找出车辆的最大归一化速度,以占用空闲时隙,避免接入碰撞和合并碰撞。
邻居列表
车辆通过周期性地发送包含车辆 ID、位置和时间戳的信标消息,来识别其传输范围内的邻居节点。每个在传输范围内的节点每隔 μ 秒广播一次信标消息,并在动态场景中每微秒更新一次。
距离
GPS 接收器可以接收位置和距离信息。该信息通过信标消息与邻居交换。最近邻的目的地通过公式(1)计算得出。
$$
close = 1 - \frac{d_i}{d_s}
$$
(1)
其中 $d_i$ 是邻居节点 $i$ 到目的节点 $d$ 的最短距离,$d_s$ 是源节点或当前携带数据包的节点到目的节点 $d$ 的最短距离,$d_i/d_s$ 表示下一跳的接近程度。
车辆移动方向(DVM)
朝向目的节点方向移动的邻居节点由公式(2)表示。
$$
\cos(\vec{V_i}, \vec{I_{id}}) = \frac{\vec{V_i} \cdot \vec{I_{id}}}{|\vec{V_i}| |\vec{I_{id}}|}
$$
(2)
$\vec{I_{id}}$ 是从邻居车辆位置到目的位置的向量,其中 $\cos(\vec{V_i}, \vec{I_{id}})$ 是邻居车辆速度向量与从节点 $i$ 到目的位置 $d$ 的位置向量之间夹角的余弦值。较大的余弦值意味着车辆沿其当前方向更接近目的地。
链路稳定性(LS)
链路稳定性通过两个节点 $n_1$、$n_2$ 之间的最大连接时间来衡量。
连通性或链路过期时间根据两个移动节点 $d_1$、$d_2$ 在时刻 $t$ 之间的距离、两个节点的传输范围 $R$、速度 $V_1, V_2$,以及两个节点的坐标 $x_1$、$y_1$(对应 $n_1$)和 $x_2$、$y_2$(对应 $n_2$)及其运动方向 $\theta_1, \theta_2$ 来计算。两节点之间的距离由公式(3)表示,节点的坐标由公式(4)表示。
$$
d_1 = v_1 t; \quad d_2 = v_2 t
$$
(3)
$$
x_1 = x_1’ + v_1 \cos(\theta_1); \quad y_1 = y_1’ + v_1 \sin(\theta_1) \
x_2 = x_2’ + v_2 \cos(\theta_2); \quad y_2 = y_2’ + v_2 \sin(\theta_2)
$$
(4)
两节点之间的距离用公式(5)表示。
$$
D^2 = (x_1 - x_2)^2 + (y_1 - y_2)^2 + (v_1 \sin(\theta_1) - v_2 \sin(\theta_2))^2
$$
(5)
链路稳定性(LS)用公式(6)表示
$$
LS = \frac{R}{D}
$$
(6)
邻居节点加权评分(WSN)
邻居节点加权评分综合了邻居节点的距离、方向和链路稳定性。WSN 在范围 $R$ 内寻找下一个可靠节点以转发数据包,其表达式见公式(7)。
$$
WS_i = \rho \left(1 - \frac{d_i}{d_s}\right) + \alpha \cos(\vec{V_i}, \vec{I_{id}}) + \sigma LSc_i
$$
(7)
其中 $\rho$、$\alpha$、$\sigma$ 为加权因子。令 $\rho + \alpha + \sigma = 1$;$\sigma > \rho$ 且 $\sigma > \alpha$,$WS_i$ 是节点 I 的加权得分,而 $LSc_i$ 是报文携带节点与邻居节点 i 之间的链路稳定性。
邻居的平均速度
每辆车邻居的平均速度用公式(8)表示
$$
\text{Aver speed}
{\text{neigh}} = \frac{1}{N_i} \sum
{i=1}^{N_i} V_{\text{speed, neigh}, i}
$$
(8)
邻居列表中车辆的最大速度用公式(9)表示。
$$
\text{norm. speed}
i = \frac{V
{\text{speed, neigh}, i} - \text{Aver speed}}{\sqrt{\frac{1}{N_i} \sum_{i=1}^{N_i} (V_{\text{speed, neigh}, i} - \text{Aver speed})^2}}
$$
(9)
多信道能量水平
从特定区域收集的能量级别与固定阈值进行比较,以判断信道是否繁忙(卡布里克等人,2004;林等人,2009)。如果接收到的能量高于阈值,则信道繁忙,否则不繁忙(卡布里克等人,2006;比斯瓦斯等人,2014)。能量检测方法的缺点是无法区分噪声能量和授权用户能量。如公式(10)所述,在噪声环境下,能量检测的性能会下降。
$$
x(n) =
\begin{cases}
w(n), & H_0 \
s(n) + w(n), & H_1
\end{cases}
$$
(10)
其中 $s(n)$ 是主用户信号,$w(n)$ 是噪声信号。
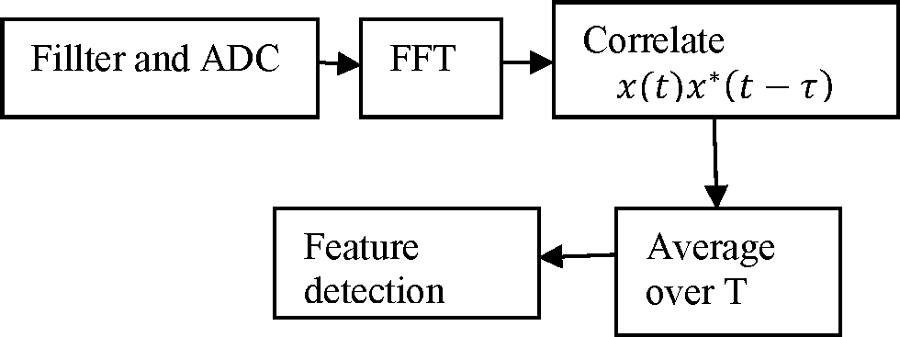
循环平稳特征检测(CFD)在噪声环境下表现出最佳性能,能够通过感知方法区分主用户信号和噪声。因此,CFD 的感知时间比简单能量检测(SED)方法更长,但在噪声环境下的性能最优。SED 的感知方法如图3所示,CFD 的感知方法如图4所示。

4 动态频谱和时隙分配
能量级别、簇ID、速度和缓冲样本由每辆车汇总。路侧单元(RSU)据此检查并做出空闲信道分配的决策(Sivaganesan 和 Karthikeyini,2015;梁等,2008)。
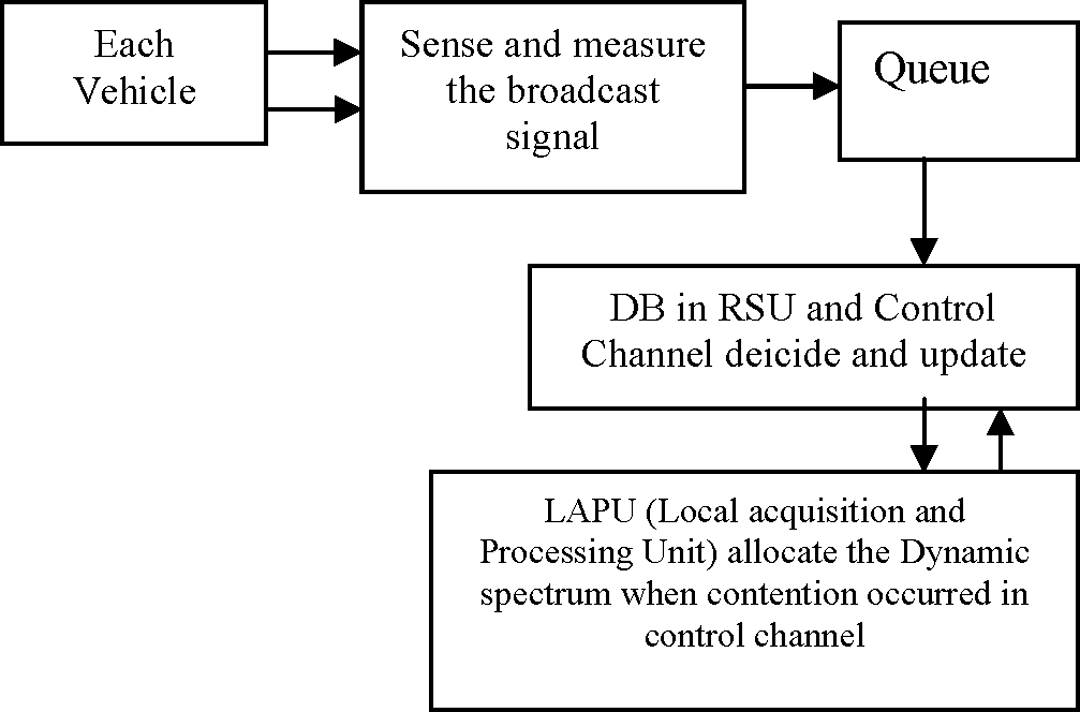
道路被划分为簇,以识别频谱稀缺情况。在覆盖区域内针对若干车辆形成帧,并根据车辆进入覆盖区域的时间戳分配时隙。采用模糊决策,由连接到RSU范围内的本地采集与处理单元(LAPU)为控制信道分配动态频谱,LAPU从RSU获取信息,并根据车辆间距分配带宽。因此,该方法用于增强路径中发生竞争时的通信性能(Sonnenschien 和 Fishman,1992;Ghandour 和 Fawaz,2011),如图5所示。
4.1 干扰降低方案
步骤1
单播转发:生成消息并负责将消息转发至目的节点的源节点。选择单播最优转发节点。
步骤2
车辆数据库中的信息(车辆ID、速度、缓冲消息以及消息生成时间戳)。
步骤3
为将消息转发至目的节点进行邻居发现。
步骤4
通过单播转发选择至目的节点的最优转发节点。
步骤5
对于最优转发节点计算间隔距离。设置源节点与转发节点之间的间隔距离为 < 20 m,相同速度,相同方向;且链路覆盖为 > 0.9 s 用于单播转发。
步骤6
时隙分配:
IEEE 802.11p MAC层的时分多址协议在专用短程通信中的应用。六个用于通信的服务信道和一个用于决策的控制信道。
步骤7
根据覆盖区域内是否存在车辆来创建时隙的帧。在双向场景中,根据车辆进入覆盖区域的情况以及帧时隙输入到媒体访问控制层来进行分配。
步骤8
时隙 K = N 其中 N 是覆盖区域内的车辆数量。
车辆 i = 1 至 N 根据车辆进入覆盖区域的时间戳为车辆分配时隙。
在一跳距离内、两跳范围内交换信标消息。
信标消息包含标识符、速度、位置、方向、邻居列表。
邻居列表包含标识符、速度、预留时隙、时隙状态。
每辆车计算邻车的平均速度,并计算每辆车的速度归一化。具有最高速度归一化的车辆或新车辆将占用空闲时隙帧。
步骤9
为区域资源稀缺分配空闲信道:车辆级别的频谱感知。创建车辆频谱可用性数据库。
步骤10
空闲信道可用性信息包含(簇ID,空闲信道 [i])。
步骤11
在路侧单元的通用频谱可用数据库中聚合车辆级别信息。
步骤12
在车辆级别上通过循环自相关函数从广播信号中计算能量。
步骤13
如果 E < 阈值,则信道 [i] 为空闲,否则如果 E > 阈值,则信道 [i] 为忙。
步骤14
分配簇ID和空闲信道[i]对,以减少频谱稀缺。
5 仿真结果
提出的SSD-TDMA方法通过不同的性能指标进行了评估,分别是延迟、数据包投递率、分组控制开销和丢包率。因此,在表1中,使用ns2仿真器将性能指标的评估结果与现有方法CSMA/CA、G-TDMA进行了比较。
5.1 表格
表1 性能指标
| 序号 | 性能指标 | 公式 |
|---|---|---|
| 1 | 延迟 | = (数据包离开时间) – (数据包到达时间) |
| 2 | 数据包投递率 | = 接收的数据包数量 × 100 / 发送的总数据包数量 |
| 3 | 控制开销 | = (控制路由请求的数量 + 控制回复数量) / 发送的总控制数据包 |
| 4 | 丢包率 | = 发送的数据包数量 – 接收的数据包数量 |
5.2 结果
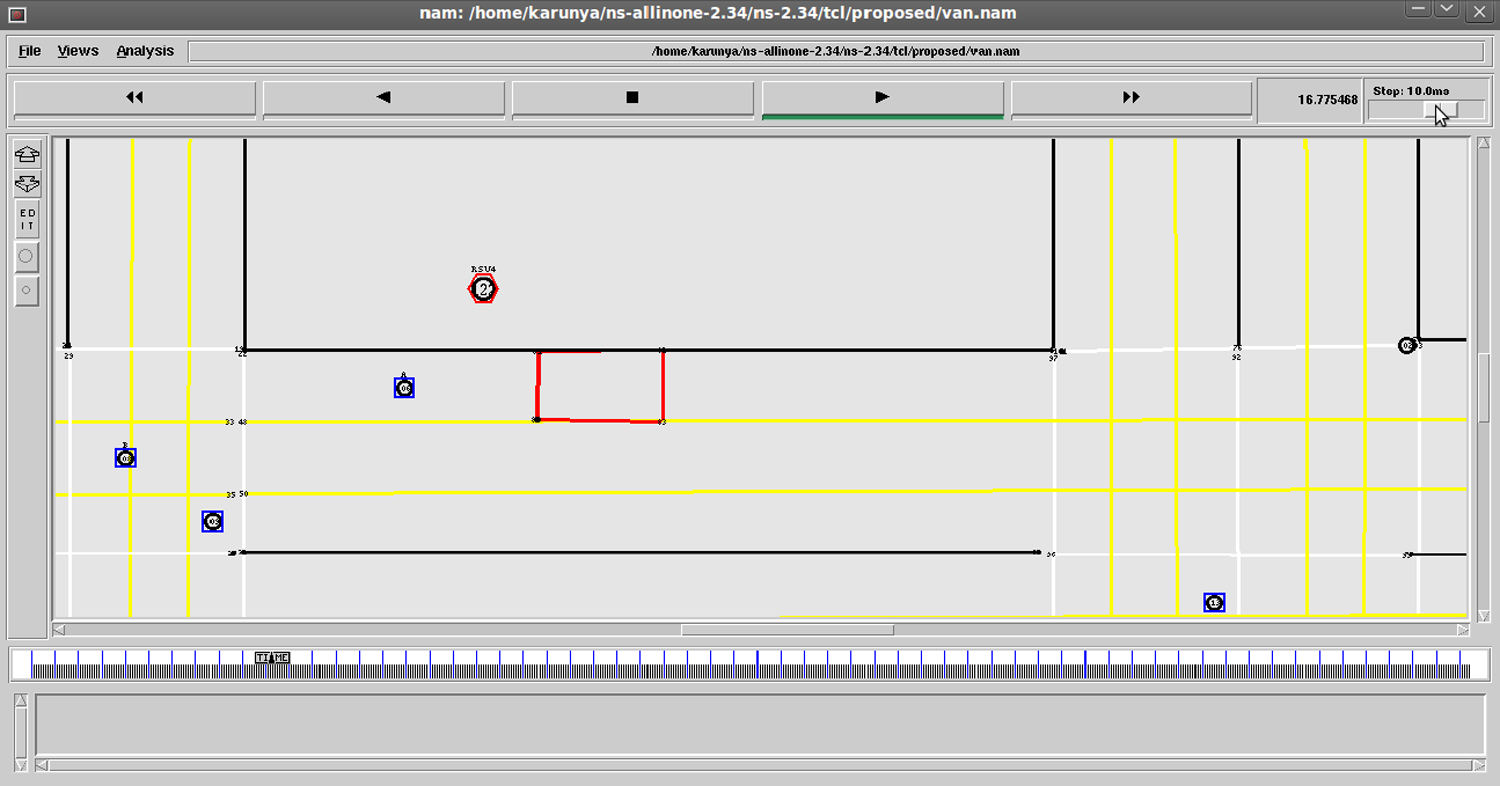
NAM中的仿真场景显示,如果任何车辆检测到道路被堵塞,它会通知所有节点,并在途中改变路径。如果任何节点检测到事故,则会与附近的路侧单元通信,路侧单元再与交通警察站联系,并在合适的时间采取适当行动,如图6所示。
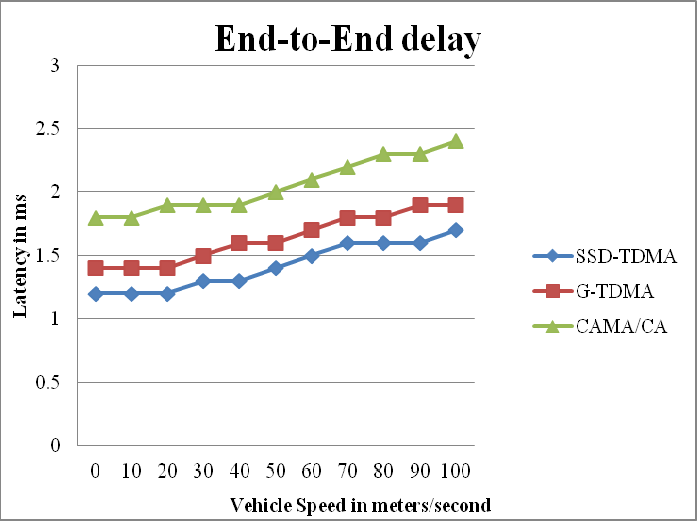
x-图的仿真结果展示了现有系统CSMA/CA、G-TDMA和提出的SSD-TDMA方法在评估各种参数指标方面的执行情况,包括延迟、数据包投递率、控制分组开销和分组转发率。端到端时延测量的是数据包从源经过网络传输到目的所花费的时间。图中的x轴表示车辆每秒的速度,y轴表示以比特每秒为单位的延迟。在速度为每秒100米时,CSMA/CA的端到端时延为2.1毫秒,G-TDMA为1.9毫秒,而提出的SSD-TDMA为1.7毫秒。该图证明了提出的SSD-TDMA方法减少了端到端时延,性能优于现有方法,如图7所示。
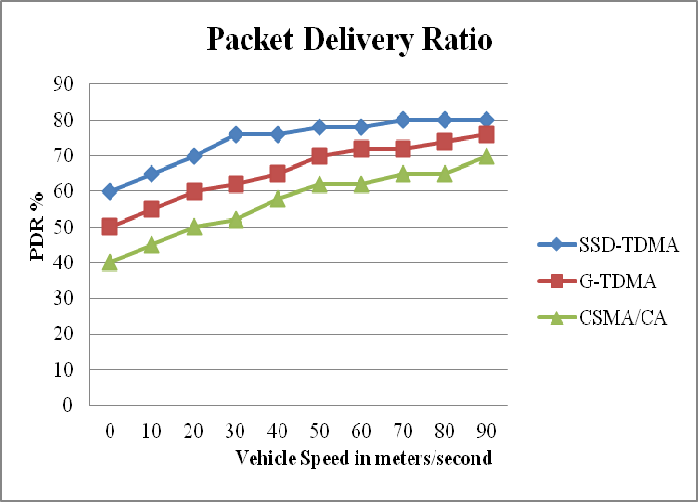
数据包投递率定义为在目的接收到的数据包总数与在源生成的数据包总数之比。图中x轴表示车辆速度,单位为米每秒,y轴表示数据包投递率(PDR),单位为比特。在速度为每秒100米时,CSMA/CA的PDR为76%,G-TDMA为79%,SSD-TDMA为80%。该图证明了提出的SSD-TDMA方法提高了数据包投递率,性能优于图8中所示的现有方法。
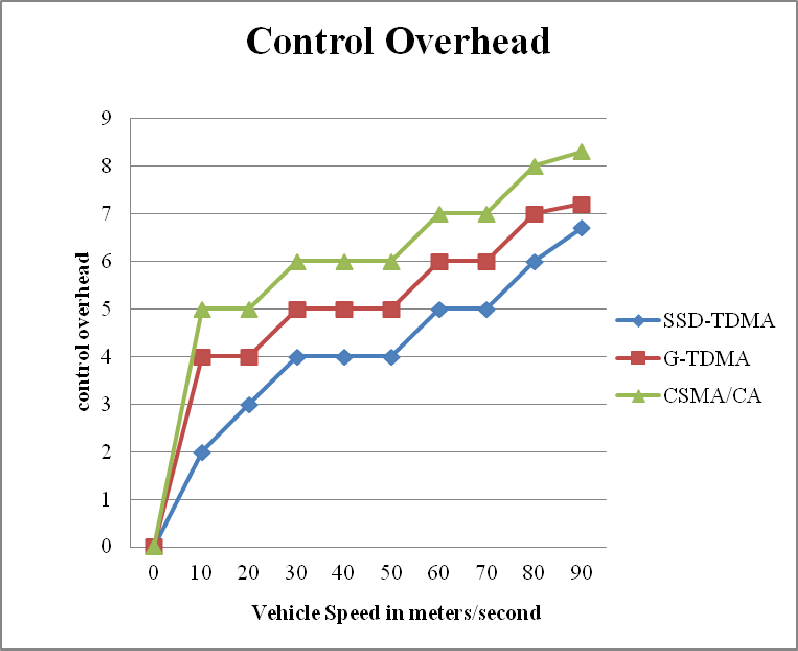
控制开销定义为路由发现和路由维护所产生的控制信息与在目的接收到的实际数据之比。图中的x轴表示车辆速度,单位为米每秒,y轴表示控制开销,单位为字节。CSMA/CA的控制开销为8.3字节,G-TDMA在每秒100米的速度下为7.2字节,SSD-TDMA为6.7字节。该图表明,提出的SSD-TDMA方法降低了控制开销,在图9中表现优于现有方法。
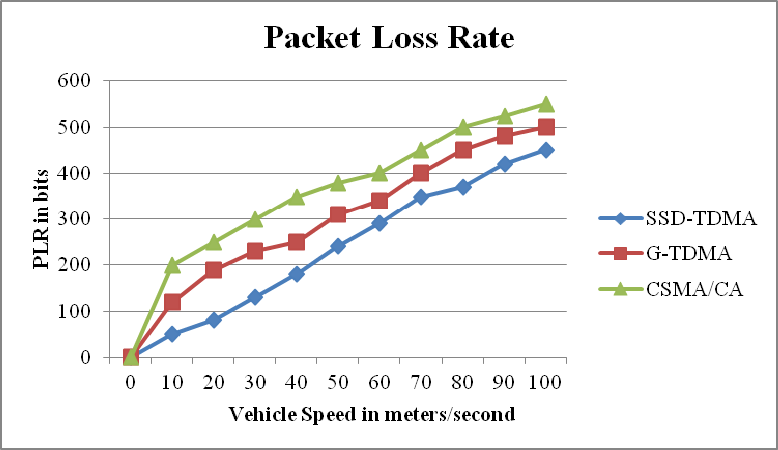
丢包率通过网络中从源到目的发送的数据包数量与接收的数据包数量之差来衡量。图中x轴表示车辆速度,单位为米每秒,y轴表示车辆速度每秒的丢包率。在每秒100米的速度下,CSMA/CA的丢包率为525比特,G-TDMA为490比特,SSD-TDMA为470比特。该图证明了提出的SSD-TDMA方法相较于图10中所示的现有方法,提高了数据包转发性能,表现更优。
6 结论
以智能交通系统(ITS)形式出现的车载网络新兴技术在增强安全与非安全消息传输方面具有重要作用,有助于减少人员伤亡、管理交通、减少干扰并提升出行舒适度。因此,所提出的框架旨在支持无碰撞的双向通信,并解决密集城市场景中的频谱稀缺问题。仿真结果表明,该框架能够成功减少干扰,并在车载自组织网络(VANET)中实现及时的消息传递。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









