




Zhang, J., Zhang, Y., Liao, M., Tian, R., Coleman, S., & Kerr, D. (n.d.). CapsLoc3D: Point Cloud Retrieval for Large-Scale Place Recognition Based on 3D Capsule Networks. IEEE Transactions on Intelligent Transportation Systems, PP(99), 1–13. https://doi.org/10.1109/TITS.2023.3346953
CapsLoc3D: 基于3D胶囊网络的大规模地点识别的点云检索。
摘要
基于点云的地点识别可用于在大规模场景中进行全局定位,并在缺乏GPS的同时定位与地图构建(SLAM)系统中进行环路闭合检测。目前基于学习的方法旨在从3D点云中提取全局和局部特征,将其编码为点云检索的描述符。关键问题是场景中动态对象对点云的遮挡会影响点云结构,网络的单一感知领域无法充分提取点云特征,并且特征之间的相关性没有充分利用。为了克服这一问题,我们提出了一种名为CapsLoc3D的新型网络。我们首先使用静态点云生成模块去除动态对象的遮挡效应,然后通过处理CapsLoc3D网络生成点云描述符,该网络包含点空间变换模块、多尺度特征融合模块、Capsnet模块和一个GeM池化层。在使用Oxford RobotCar、KITTI和NEU数据集进行验证后,实验证明我们的方法与当前最先进的算法相比表现更好,同时具有良好的泛化性能和计算效率。
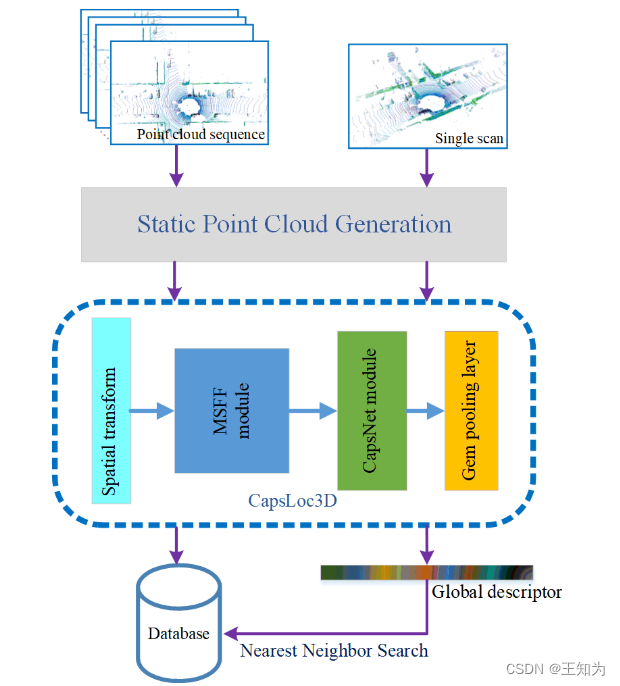
图1. 地点识别流程。连续的点云输入到静态点云生成模块,以获取用于减轻遮挡的点云,然后CapsLoc3D将点云编码为实例检索的描述符。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























 到【灌水乐园】发言
到【灌水乐园】发言









