






Cyberdog——小米四足机器人测评
小米在2021下半年的发布会上,出人意料地发布了一款四足机器人——Cyberdog,其中文名为“铁蛋(以下简称Cyberdog)。Cyberdog的定价为9999元,只限400个名额,需要申请并审核才能拥有购买资格。
开箱
硬件
要知道,四足机器人能卖到9999元的价格,真的是“交个朋友”了。纵观国内外四足机器人厂商,国内的“宇树科技”售价1.6万起,国外的“波士顿动力”售价更是高达48万元。
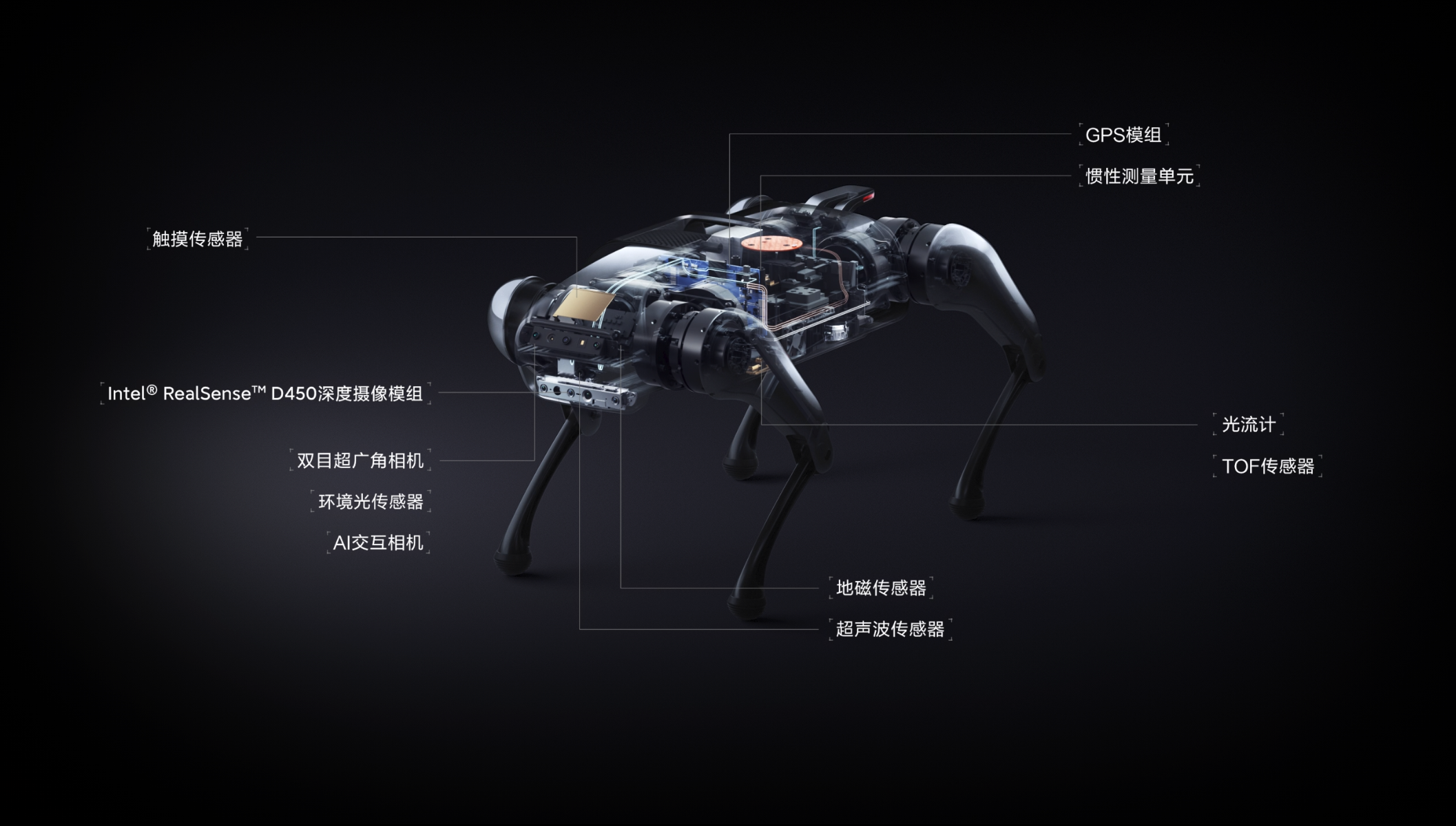
根据官方的宣传图,传感器与外设部分,Cyberdog搭载了Intel Realsense D450深度摄像头、双目超广角相机、环境光传感器、AI交互相机、GPS模组、惯性测量单元、光流计、TOF传感器、地磁传感器、超声波传感器、触摸传感器等。
而主控部分,Cyberdog搭载了英伟达的 Nvidia Jetson Xavier NX作为主控制器、全志科技的Allwinner MR813作为电机驱动器、STM32F405和GD32用作其他外设的驱动。
再来看价格,只看千元价格的硬件,Jetson Xavier NX定价3000+,Intel Realsense D450定价1500+,12个高性能关节电机每个售价至少500+,这还没算其他的传感器、外壳、电池等等。制作成本加起来至少超过定价9999元,我相信售卖一定是亏本的。
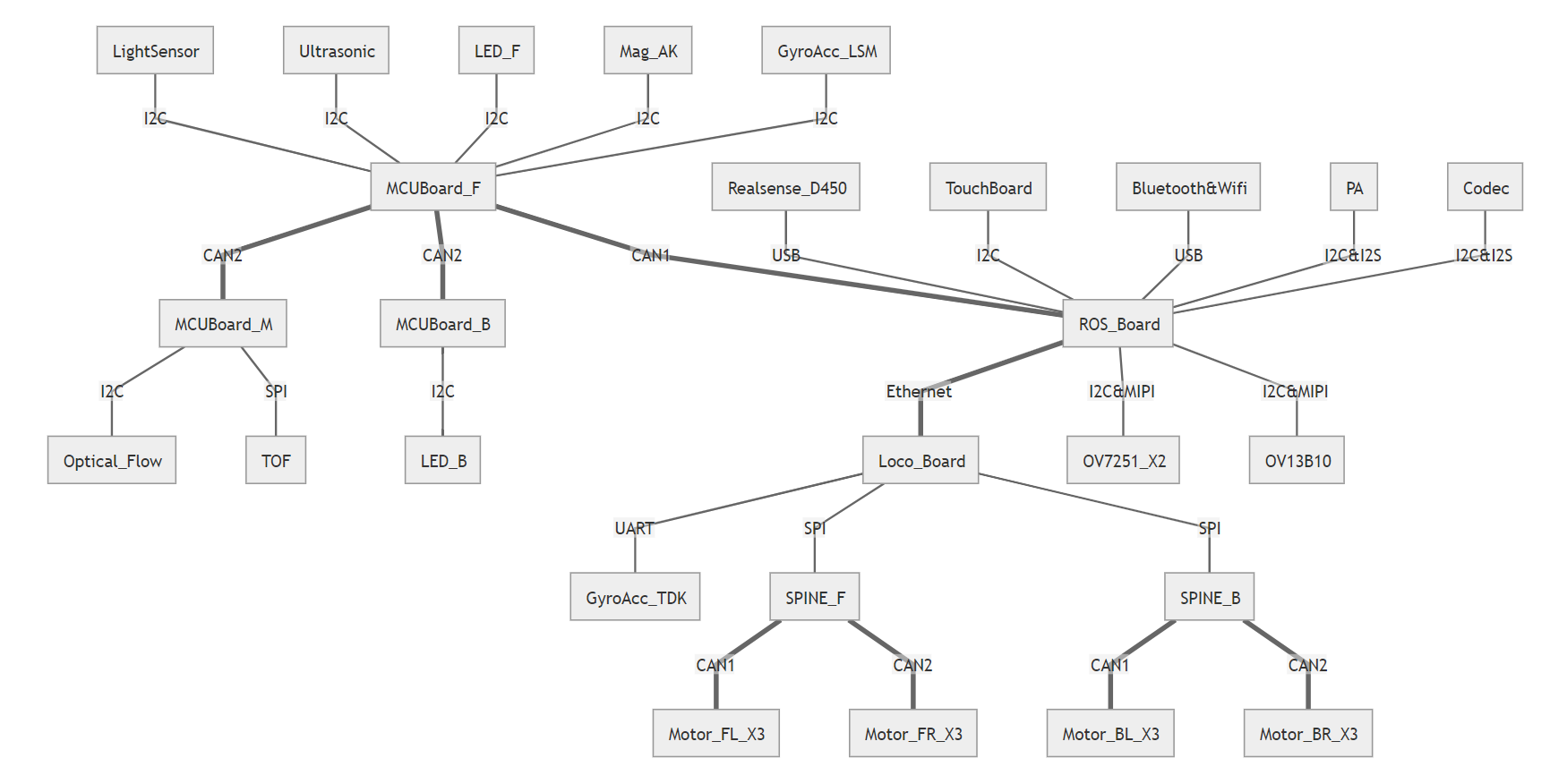
外设与硬件之间使用串口或CAN相互通信,上图为Cyberdog的硬件架构。
软件
下图为Cyberdog的软件架构图
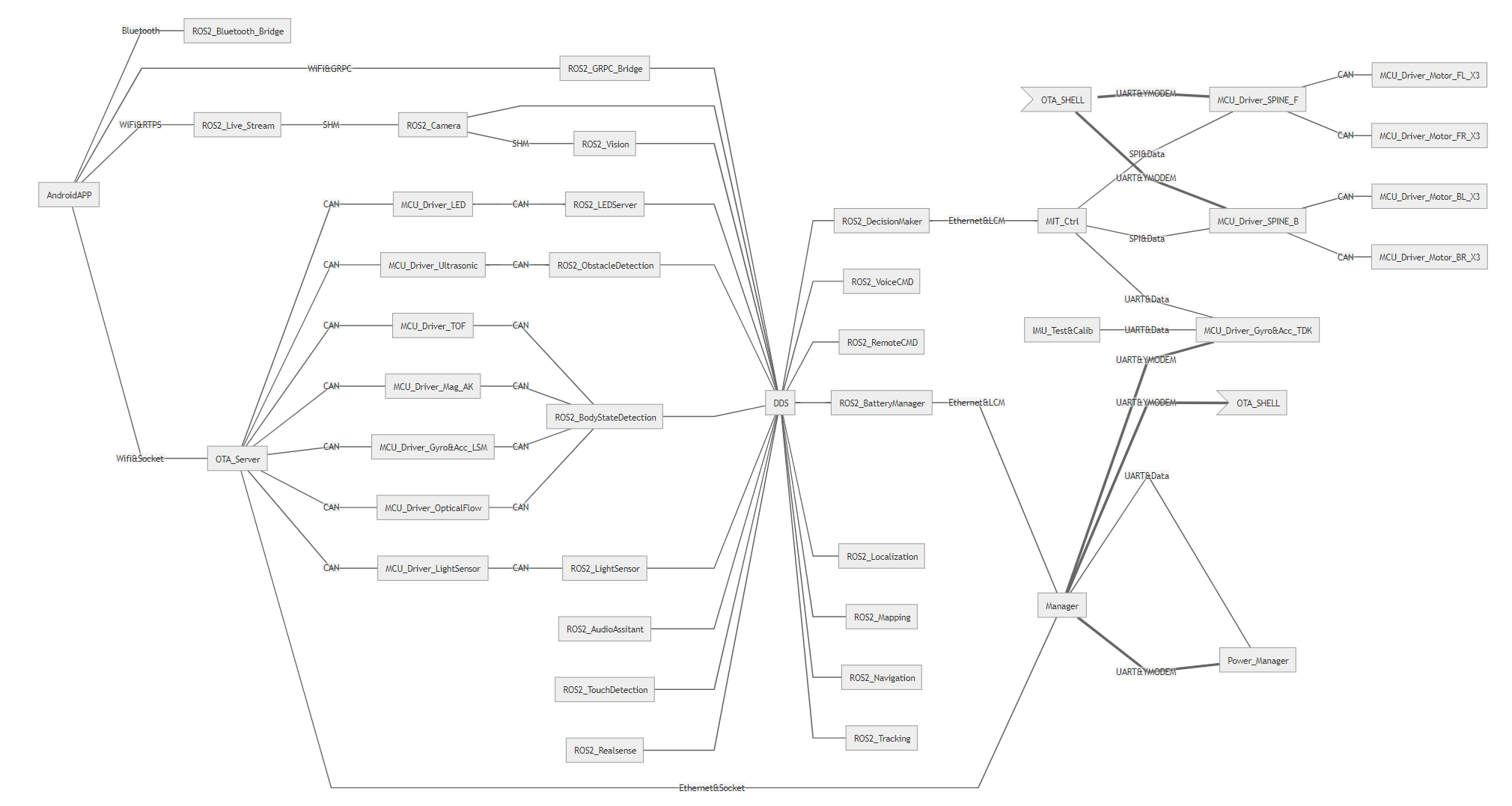
CyberDog使用的是主流的机器人开源架构ROS2。ROS是用于编写机器人软件程序的一种具有高度灵活性的软件架构。但Cyberdog没有使用ROS,而是使用了ROS2。
Why ROS2?本文对于ROS2不会详细阐述,这里埋个坑,后面的文章会深度讲解ROS2的安装与配置。
前景
很多人会问,这个机器狗有啥用?对于我来说,Cyberdog是一个超高性价比的四足机器人实验平台,可以通过这个平台学到运动控制,电机控制,ROS2的使用等等一系列的技术栈。Cyberdog的源码是全开源的,虽然代码有很明显的赶工迹象,但是有几百位开发者的加入,我相信整个项目的源码与资料会逐渐完善。
仿生机器人在服务、军工、医疗等多种领域都有着无限的发展潜力,相信在未来会有更多类似的产品出现在我们的日常生活中。


















 813
813

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











