







 本文详细解读了YOLOv8官方源码中的OBBPredictor类,重点在于如何在postprocess方法中添加feat_ind(nms后的有用anchor点索引),并展示了如何在nms函数中修改返回参数以获取这些索引。同时提及了如何在模型的forward过程中考虑返回特征向量。
本文详细解读了YOLOv8官方源码中的OBBPredictor类,重点在于如何在postprocess方法中添加feat_ind(nms后的有用anchor点索引),并展示了如何在nms函数中修改返回参数以获取这些索引。同时提及了如何在模型的forward过程中考虑返回特征向量。
写在前面
感叹一下:如果GPT能在我刚上大学的时候出来,也许我能学的比现在好太多,毕竟大学有一个比自己优秀太多的人引导着是多么地捷径。
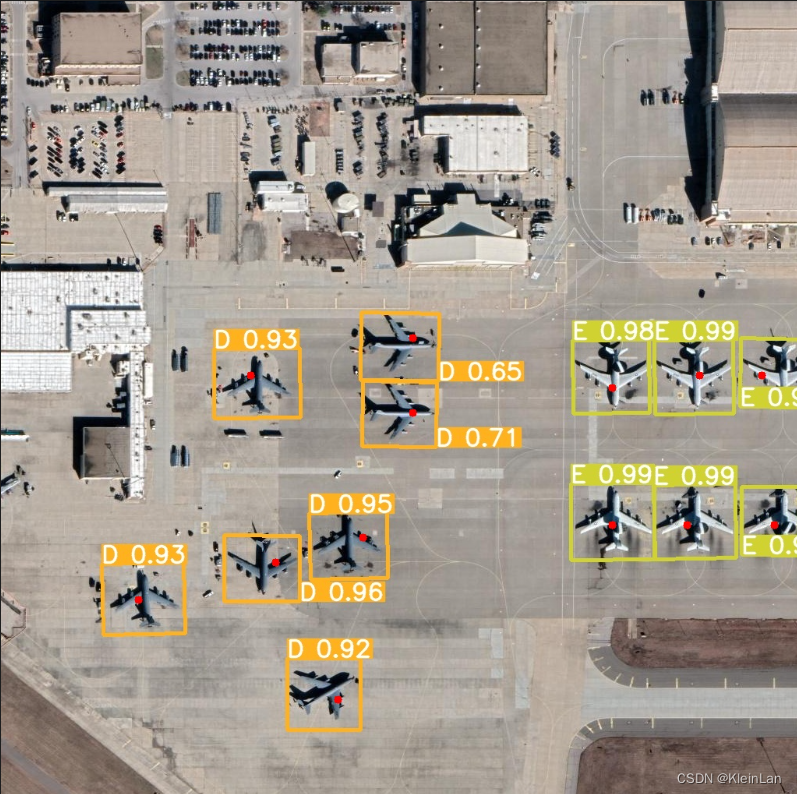
anchor-point可视化
YOLOv8官方源码解读
predictor
ultralytics/ultralytics/models/yolo/obb/predict.py中源码有一个OBBPredictor,继承原始的DetectionPredictor,此可视化主要是修改这个类的返回变量,加入一个feat_ind(nms后的有用anchor_point的索引值)。
def postprocess(self, preds, img, orig_imgs, return_feat_ind=False):
"""Post-processes predictions and returns a list of Results objects."""
if return_feat_ind:
preds, feat_ind = ops.non_max_suppression(
preds,
self.args.conf,
self.args.iou,
agnostic=self.args.agnostic_nms,
max_det=self.args.max_det,
nc=len(self.model.names),
classes=self.args.classes,
rotated=True,
return_feat_ind=return_feat_ind,
)
else:
preds = ops.non_max_suppression(
preds,
self.args.conf,
self.args.iou,
agnostic=self.args.agnostic_nms,
max_det=self.args.max_det,
nc=len(self.model.names),
classes=self.args.classes,
rotated=True,
return_feat_ind=return_feat_ind,
)
if not isinstance(orig_imgs, list): # input images are a torch.Tensor, not a list
orig_imgs = ops.convert_torch2numpy_batch(orig_imgs)
results = []
for pred, orig_img, img_path in zip(preds, orig_imgs, self.batch[0]):
rboxes = ops.regularize_rboxes(torch.cat([pred[:, :4], pred[:, -1:]], dim=-1))
rboxes[:, :4] = ops.scale_boxes(img.shape[2:], rboxes[:, :4], orig_img.shape, xywh=True)
# xywh, r, conf, cls
obb = torch.cat([rboxes, pred[:, 4:6]], dim=-1)
anchor_points = self.count_anchor_point(feat_ind)
results.append(Results(orig_img, path=img_path, names=self.model.names, obb=obb, anchor_points=anchor_points))
if return_feat_ind:
return results, feat_ind
else:
return results
可以看到首先要在nms函数里修改,当我们要求返回feat_ind时,将return_feat_ind改为true。
def non_max_suppression(
prediction,
conf_thres=0.25,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









