




 本文探讨了在自动驾驶算法中,如何利用LQR进行横向控制,同时结合PID算法进行纵向控制。通过实例展示了不同PID参数下车辆的控制结果,并提供了代码实现。理解了这种分离控制在实际应用中的效果。
本文探讨了在自动驾驶算法中,如何利用LQR进行横向控制,同时结合PID算法进行纵向控制。通过实例展示了不同PID参数下车辆的控制结果,并提供了代码实现。理解了这种分离控制在实际应用中的效果。
前言:
在量产ADAS或者自动驾驶算法中,横纵向控制往往都是分开控制的,上一篇文章中介绍了如何使用LQR同时进行横纵向的控制,本文将介绍一种横纵向分开控制的思路,将使用LQR算法进行横向控制,同时使用PID算法进行纵向控制。这种方法在很多自动驾驶科技公司比较常见,百度apollo的控制节点conrol也是使用同样的思路。
如果对自动驾驶算法感兴趣,可以关注我的主页和专栏。
 https://blog.youkuaiyun.com/nn243823163/category_11685852.html
https://blog.youkuaiyun.com/nn243823163/category_11685852.htmlApollo Planning决策规划算法代码详细解析 (1):Scenario选择
Apollo Planning决策规划算法代码详细解析 (5):规划算法流程介绍
Apollo Planning决策规划算法代码详解 (22):决策规划算法最完整介绍
自动驾驶算法详解(2): prescan联合simulink进行FCW的仿真
自动驾驶算法详解(3): LQR算法进行轨迹跟踪,lqr_speed_steering_control( )的python实现
自动驾驶算法详解(5): 贝塞尔曲线进行路径规划的python实现
Apollo算法仿真调试(1): 使用Vscode断点调试apollo的方法
Apollo规划决策算法仿真调试(7):pnc_map模块详解GetRouteSegments规划局部地图生成下篇_
正文如下:
一、横向LQR问题模型建立:
理论部分比较成熟,这里只介绍demo所使用的建模方程:
使用离散代数黎卡提方程求解
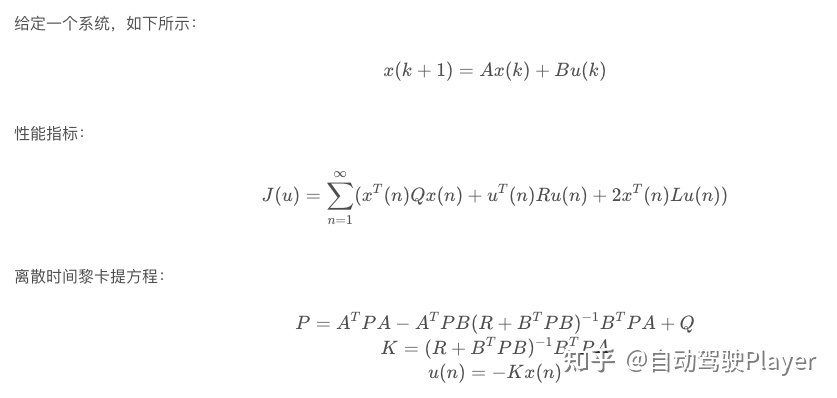
系统状态矩阵与LQR同时控制横纵向相比有所简化,状态矩阵如下,X = [距离差,距离差导数,角度差,角度差导数]:
输入矩阵变为1个变量,只有前轮转角。
A矩阵和B矩阵如下:
二、纵向PID控制
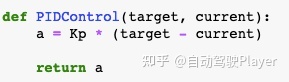
纵向上由PID算法来计算加速度,本demo中只保留P项:
三、结果分析
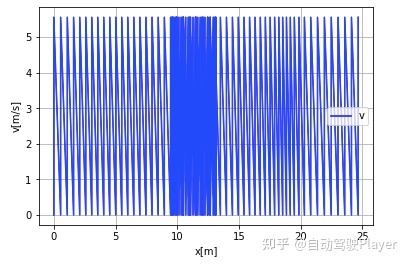
从状态更新的方法可以看到,纵向控制的速度会影响横向控制的结果

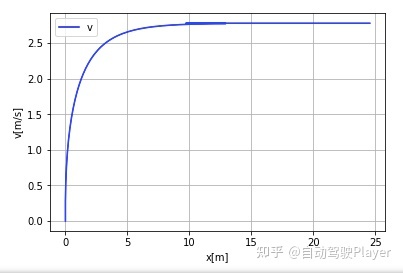
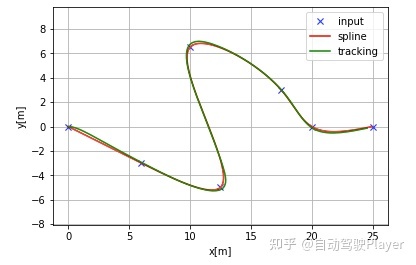
1、纵向参数P = 1 时的控制结果:
速度控制结果:
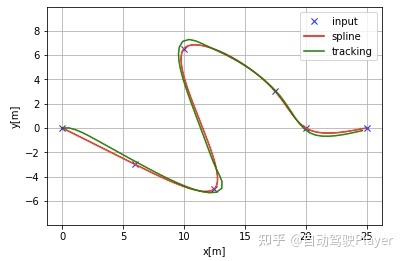
轨迹跟踪结果:
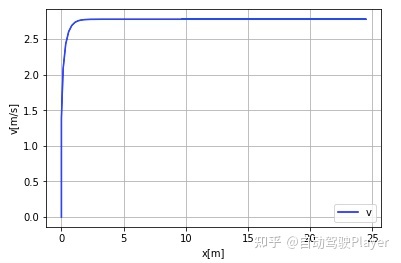
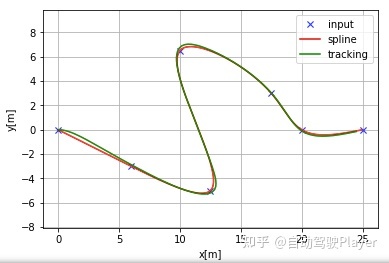
2、纵向参数P = 5 时的控制结果:
速度控制结果:
轨迹跟踪结果:
3、纵向参数P = 20时的控制结果:
速度控制结果:
轨迹跟踪结果:
4、纵向参数P = 30时的控制结果:
速度控制结果:
四、代码实现
1、参数初始化
Kp = 1.0 # speed proportional gain
# LQR parameter
Q = np.eye(4)
R = np.eye(1)
# parameters
dt = 0.1 # time tick[s]
L = 0.5 # Wheel base of the vehicle [m]
max_steer = np.deg2rad(45.0) # maximum steering angle[rad]
show_animation = True
# show_animation = False2、相关函数定义
def PIDControl(target, current):
a = Kp * (target - current)
return a
def lqr_steering_control(state, cx, cy, cyaw, ck, pe, pth_e):
ind, e = calc_nearest_index(state, cx, cy, cyaw)
k = ck[ind]
v = state.v
th_e = pi_2_pi(state.yaw - cyaw[ind])
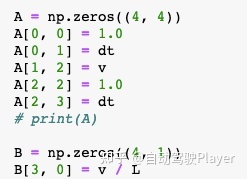
A = np.zeros((4, 4))
A[0, 0] = 1.0
A[0, 1] = dt
A[1, 2] = v
A[2, 2] = 1.0
A[2, 3] = dt
# print(A)
B = np.zeros((4, 1))
B[3, 0] = v / L
K, _, _ = dlqr(A, B, Q, R)
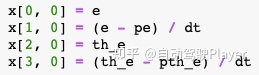
x = np.zeros((4, 1))
x[0, 0] = e
x[1, 0] = (e - pe) / dt
x[2, 0] = th_e
x[3, 0] = (th_e - pth_e) / dt
ff = math.atan2(L * k, 1)
fb = pi_2_pi((-K @ x)[0, 0])
delta = ff + fb
return delta, ind, e, th_e
def closed_loop_prediction(cx, cy, cyaw, ck, speed_profile, goal):
T = 500.0 # max simulation time
goal_dis = 0.3
stop_speed = 0.05
state = State(x=-0.0, y=-0.0, yaw=0.0, v=0.0)
time = 0.0
x = [state.x]
y = [state.y]
yaw = [state.yaw]
v = [state.v]
t = [0.0]
e, e_th = 0.0, 0.0
while T >= time:
dl, target_ind, e, e_th = lqr_steering_control(
state, cx, cy, cyaw, ck, e, e_th)
ai = PIDControl(speed_profile[target_ind], state.v)
state = update(state, ai, dl)
if abs(state.v) <= stop_speed:
target_ind += 1
time = time + dt
# check goal
dx = state.x - goal[0]
dy = state.y - goal[1]
if math.hypot(dx, dy) <= goal_dis:
print("Goal")
break
x.append(state.x)
y.append(state.y)
yaw.append(state.yaw)
v.append(state.v)
t.append(time)
if target_ind % 100 == 0 and show_animation:
plt.cla()
# for stopping simulation with the esc key.
plt.gcf().canvas.mpl_connect('key_release_event',
lambda event: [exit(0) if event.key == 'escape' else None])
plt.plot(cx, cy, "-r", label="course")
plt.plot(x, y, "ob", label="trajectory")
plt.plot(cx[target_ind], cy[target_ind], "xg", label="target")
plt.axis("equal")
plt.grid(True)
plt.title("speed[km/h]:" + str(round(state.v * 3.6, 2))
+ ",target index:" + str(target_ind))
plt.pause(0.0001)
return t, x, y, yaw, v
3、主函数
def main():
print("LQR steering control tracking start!!")
# ax = [0.0, 6.0, 12.5, 10.0, 7.5, 3.0, -1.0]
# ay = [0.0, -3.0, -5.0, 6.5, 3.0, 5.0, -2.0]
ax = [0.0, 6.0, 12.5, 10.0, 17.5, 20.0, 25.0]
ay = [0.0, -3.0, -5.0, 6.5, 3.0, 0.0, 0.0]
goal = [ax[-1], ay[-1]]
cx, cy, cyaw, ck, s = calc_spline_course(
ax, ay, ds=0.1)
target_speed = 10.0 / 3.6 # simulation parameter km/h -> m/s
sp = calc_speed_profile(cx, cy, cyaw, target_speed)
t, x, y, yaw, v = closed_loop_prediction(cx, cy, cyaw, ck, sp, goal)
if show_animation: # pragma: no cover
plt.close()
plt.subplots(1)
plt.plot(ax, ay, "xb", label="input")
plt.plot(cx, cy, "-r", label="spline")
plt.plot(x, y, "-g", label="tracking")
plt.grid(True)
plt.axis("equal")
plt.xlabel("x[m]")
plt.ylabel("y[m]")
plt.legend()
plt.show()

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











