



 本文总结了创建ROS Workspace的方法,包括创建工作空间、初始化、编译等步骤。还介绍了创建ROS Package,如创建hello_world包,编写相关代码文件,编译运行。同时说明了运行中可能出现的问题及解决办法,以及编写启动脚本和可视化操作,最后提及停止程序的方式。
本文总结了创建ROS Workspace的方法,包括创建工作空间、初始化、编译等步骤。还介绍了创建ROS Package,如创建hello_world包,编写相关代码文件,编译运行。同时说明了运行中可能出现的问题及解决办法,以及编写启动脚本和可视化操作,最后提及停止程序的方式。
创建一个ROS Workspace 的方法总结:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ~/catkin_ws/
catkin_make
source devel/setup.bash
创建ROS Package
cd ~/catkin_ws/src
catkin_create_pkg package_name package_dependencies
如:
catkin_create_pkg hello_world roscpp std_msgs
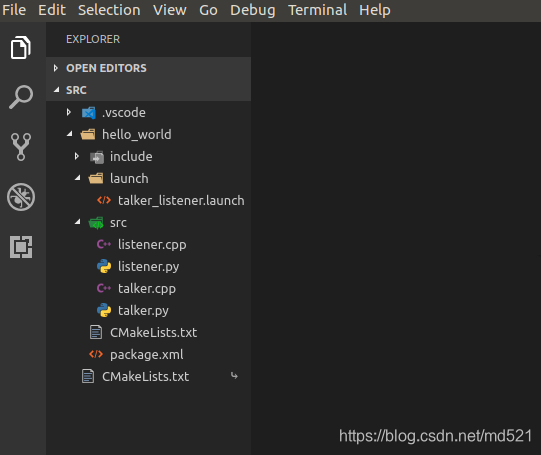
这里创建的package是hello_world,用VS Code打开hello_world文件夹,结构如下
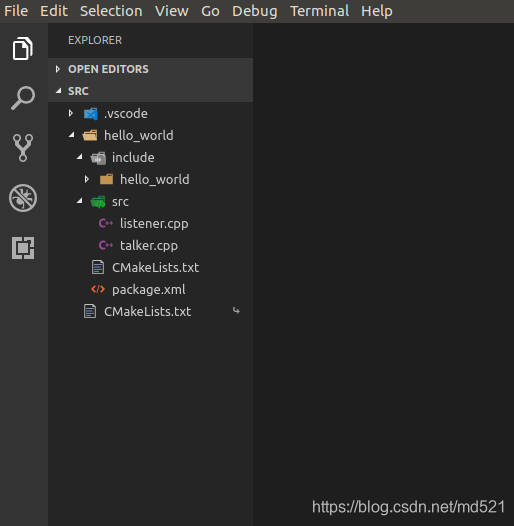
在hello_world/src文件夹下面创建talker.cpp和listener.cpp文件。
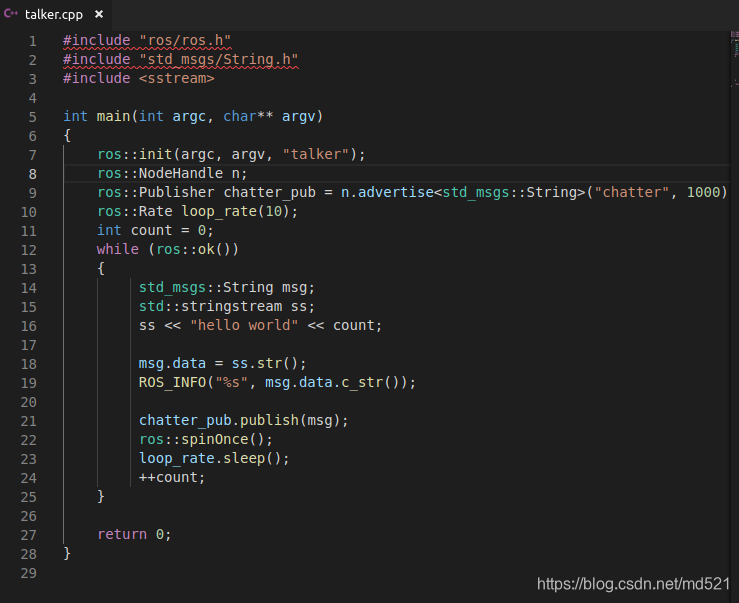
talker.cpp
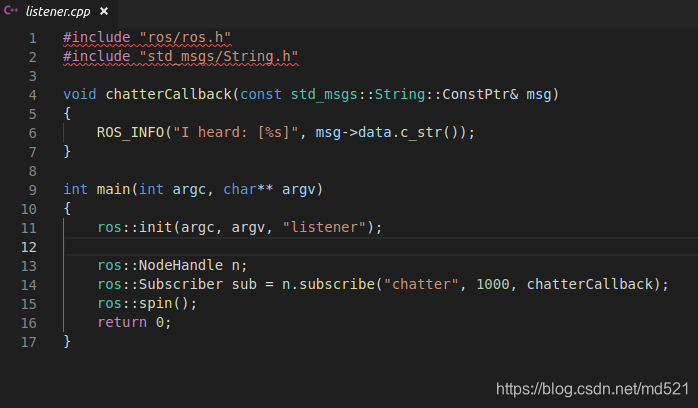
listener.cpp
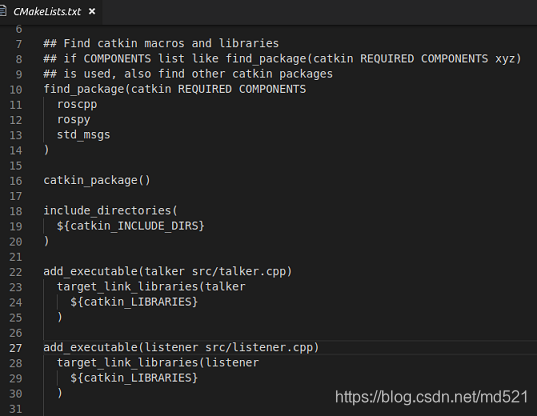
CMakeLists.txt
编译:
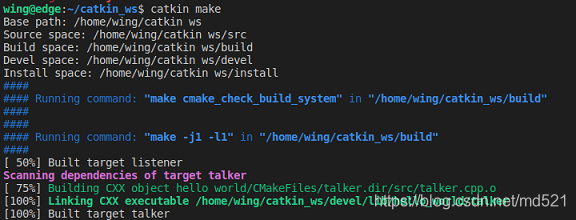
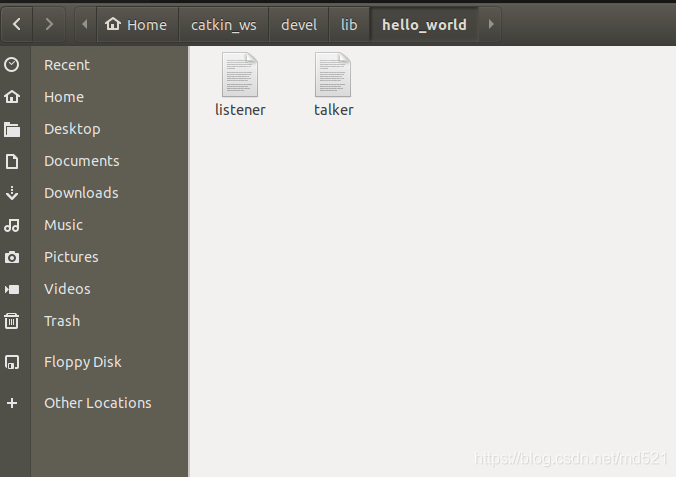
生成文件:
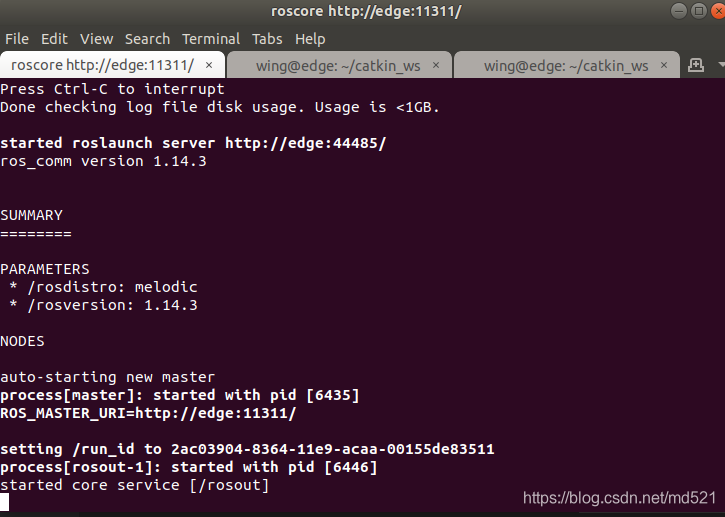
运行:
roscore
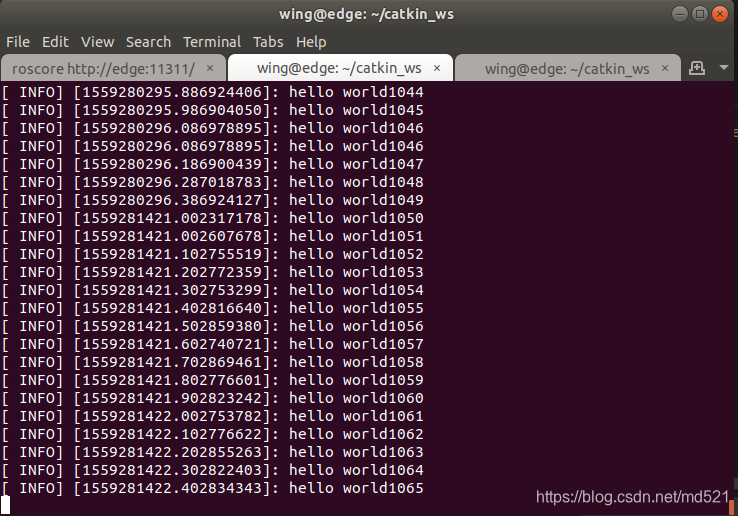
rosrun hello_world talker
备注: 如果在运行过程中出现hello_world找不到,请先运行下述命令,然后在执行程序。
source devel/setup.bash
rosrun hello_world listener
备注: 如果在运行过程中出现hello_world找不到,请先运行下述命令,然后在执行程序。
source devel/setup.bash
编写启动脚本:
1. 在hello_world文件下创建launch文件夹。
2. 在launch文件夹下创建talker_listener.launch文件。
talker_listener.launch内容如下:

3. 保存,给talker_listener.launch文件添加权限。
![]()
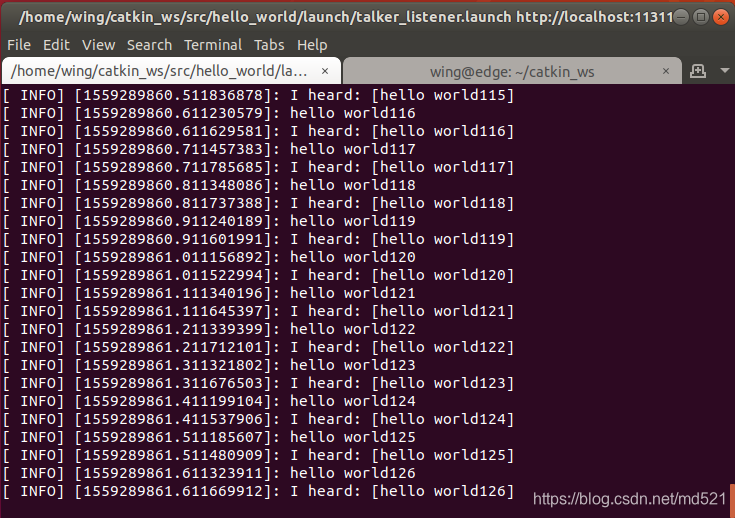
4. 运行。
roslaubch hello_world talker_listener.launch
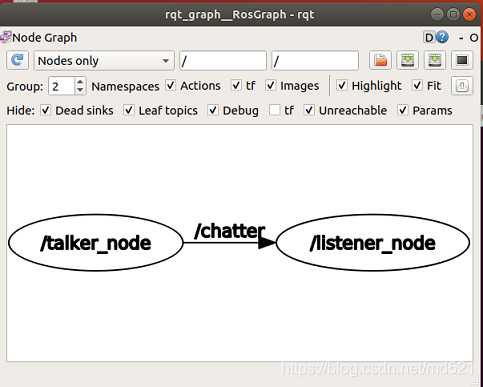
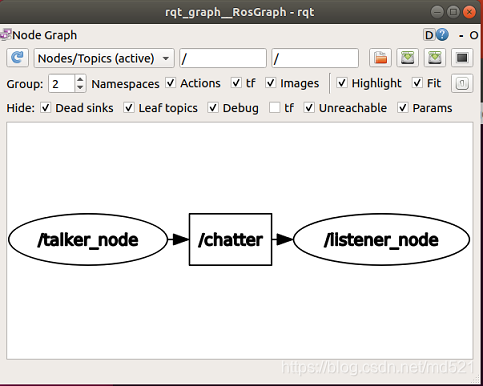
5. 可视化,运行rqt_graph
停止程序
键盘Ctrl+C直接停止程序。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









