




828华为云征文|部署多功能集成的协作知识库 AFFiNE
一、Flexus云服务器X实例介绍
云服务器是一种高效便捷的计算资源服务。它可随时根据需求进行弹性扩展,具有高可靠性和稳定性。无需担心硬件维护,轻松应对高并发访问。无论是企业建站、开发应用还是数据存储,云服务器都能提供强大支持,助力你的业务在云端飞速发展。
华为云下一代云服务器Flexus X实例焕新上线,新产品提供与华为云旗舰级云服务器产品相同的单AZ 99.975%可用性,跨AZ 99.995%可用性,阶梯式定价、动态画像并搭配AS,实现资源弹性伸缩对应业务弹性变化,同时降低TCO,覆盖行业大多数通用工作负载场景。
Flexus X实例通过和其他服务组合,具备计算、镜像安装、网络、存储、安全等能力,您可根据业务需要灵活配置各资源。

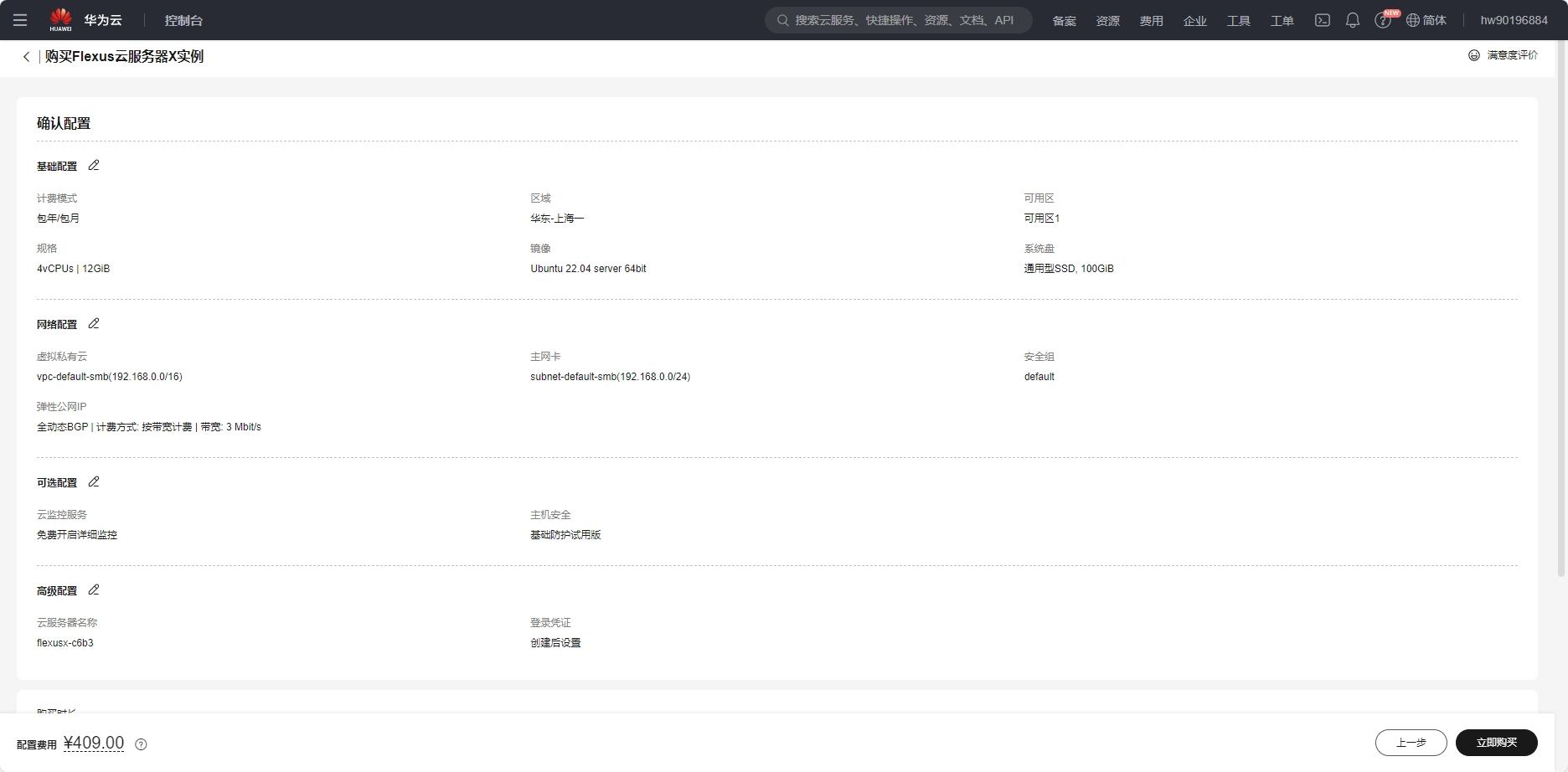
本次测评使用的规格是:4核12G-100G-3M规格的Flexus X实例基础模式
二、Flexus云服务器X实例配置
2.1 重置密码
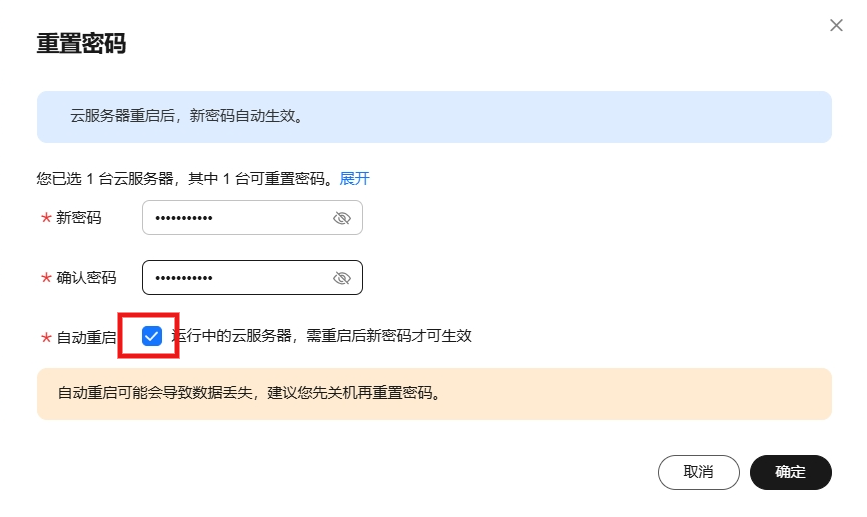
购买服务器的时候可以提前设置用户名和密码,因为我这里跳过了,所以购买完成后需要重置密码,会短信或站内消息通过你的云服务器信息,重点是公网IP地址和用户名,首先打开你的服务器控制台,选择重置密码

勾选自动重启,点击确定即可
2.2 服务器连接
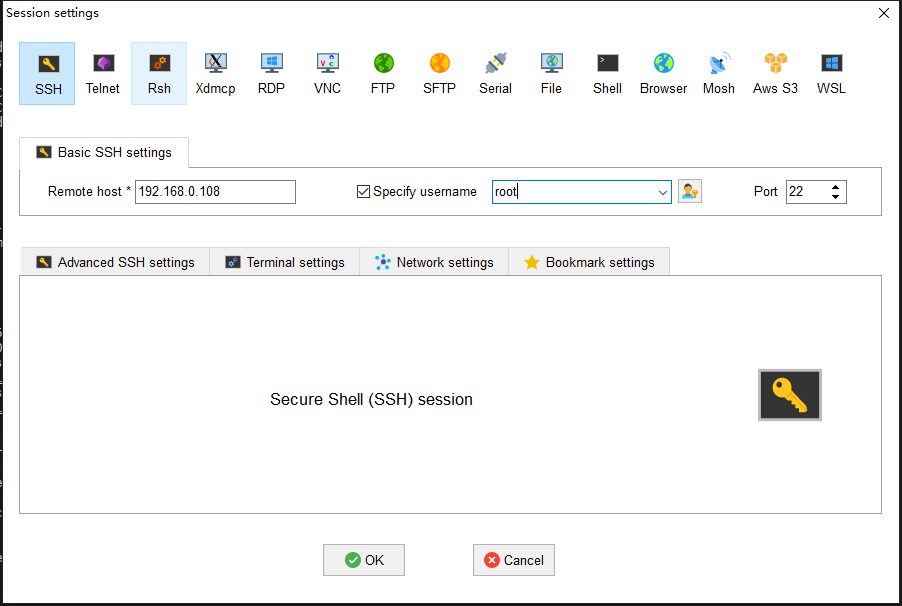
华为云服务器提供了多种链接方式,如使用控制台提供的VNC方式登录、使用Linux/Mac OS系统主机登录Linux弹性云服务器(即ssh root@192.168.48.78命令)或者使用Putty、Xshell等工具登录Linux弹性云服务器。
我个人习惯使用 MobaXterm 这款软件,添加SSH连接,输出公网IP、用户名和端口(默认22),连接即可。
2.3 安全组配置
安全组是一个逻辑上的分组,为同一个VPC内的云服务器提供访问策略。用户可以在安全组中定义各种访问规则,当云服务器加入该安全组后,即受到这些访问规则的保护。
系统为每个网卡默认创建一个默认安全组,默认安全组的规则是对出方向上的数据报文全部放行,入方向访问受限。您可以使用默认安全组,也可以根据需要创建自定义的安全组。

主要需要填写优先级(默认填1即可)、协议端口(协议一般为TCP或UDP,端口一般选择你项目需要暴露的端口即可),描述(选填,一般会填写此端口的用途以免忘记了),其他默认点击确定即可。安全组配置主要是暴露端口可以给外网访问。

如果还不清楚可以参考文档:安全组配置示例
2.4 Docker 环境搭建
本次服务器环境是ubuntu系统镜像,需要自己安装docker环境
| 服务器类别 | 系统镜像 | 内网IP地址 | Docker版本 | 操作系统版本 |
|---|---|---|---|---|
| Flexus云服务器X实例 | Ubuntu | 192.168.0.168 | 27.2.0 | Ubuntu 22.04.4 LTS |
使用apt-get命令安装docker及其配置
# 安装必要工具包
$ sudo apt-get install \
apt-transport-https \
ca-certificates \
curl \
gnupg-agent \
software-properties-common
# 添加Docker GPG秘钥
$ sudo curl -fsSL https://mirrors.ustc.edu.cn/docker-ce/linux/ubuntu/gpg | sudo apt-key add -
# 配置仓库源
$ sudo add-apt-repository \
"deb [arch=amd64] https://mirrors.ustc.edu.cn/docker-ce/linux/ubuntu \
$(lsb_release -cs) \
stable"
# 更新apt包索引
$ sudo apt-get update
# 安装docker
$ sudo apt-get install docker-ce docker-ce-cli containerd.io
# 添加docker镜像源
$ sudo vim /etc/docker/daemon.json
{
"registry-mirrors": [
"https://ustc-edu-cn.mirror.aliyuncs.com/",
"https://docker.mirrors.ustc.edu.cn",
"https://docker.nju.edu.cn",
"https://ccr.ccs.tencentyun.com/",
"https://docker.m.daocloud.io/",
"https://doc 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1306
1306

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









