



由于16bit的深度图不可以直接利用window自带图片工具或者wps图片工具查看,所以为了便捷性,开发此工具:
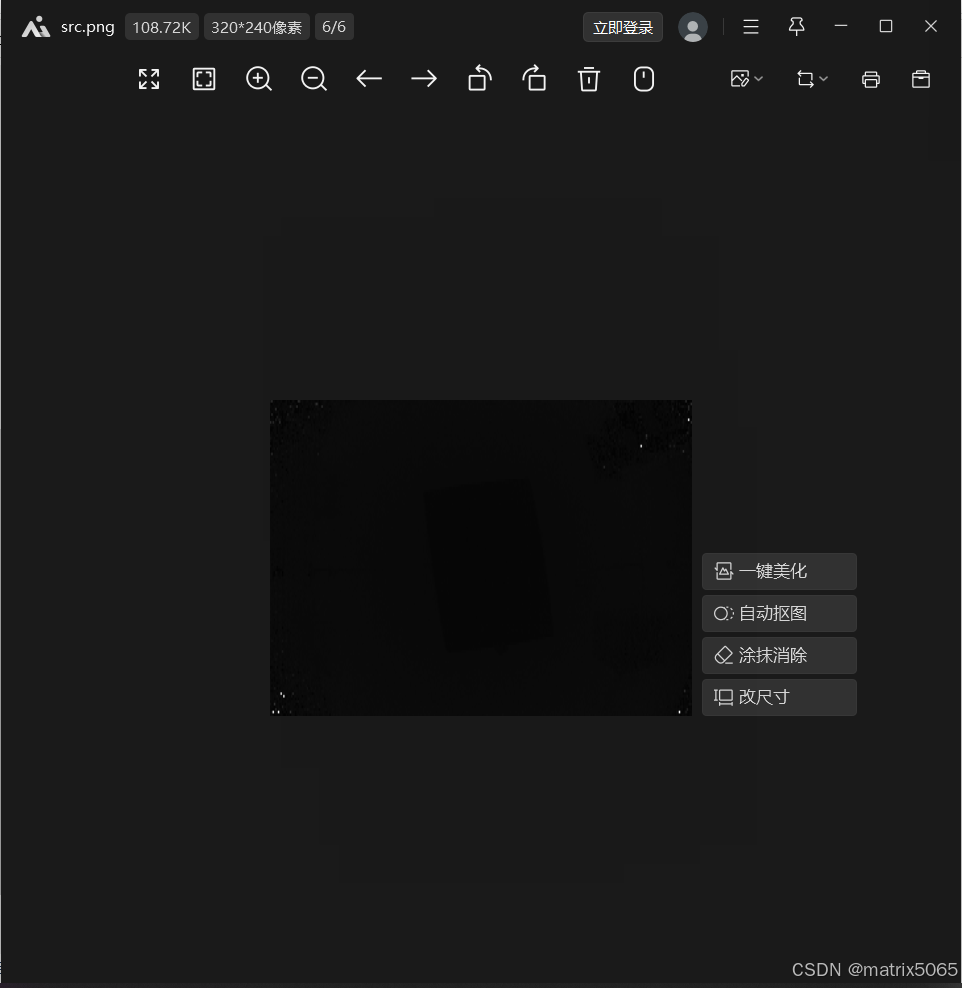
直接查看,效果如图:
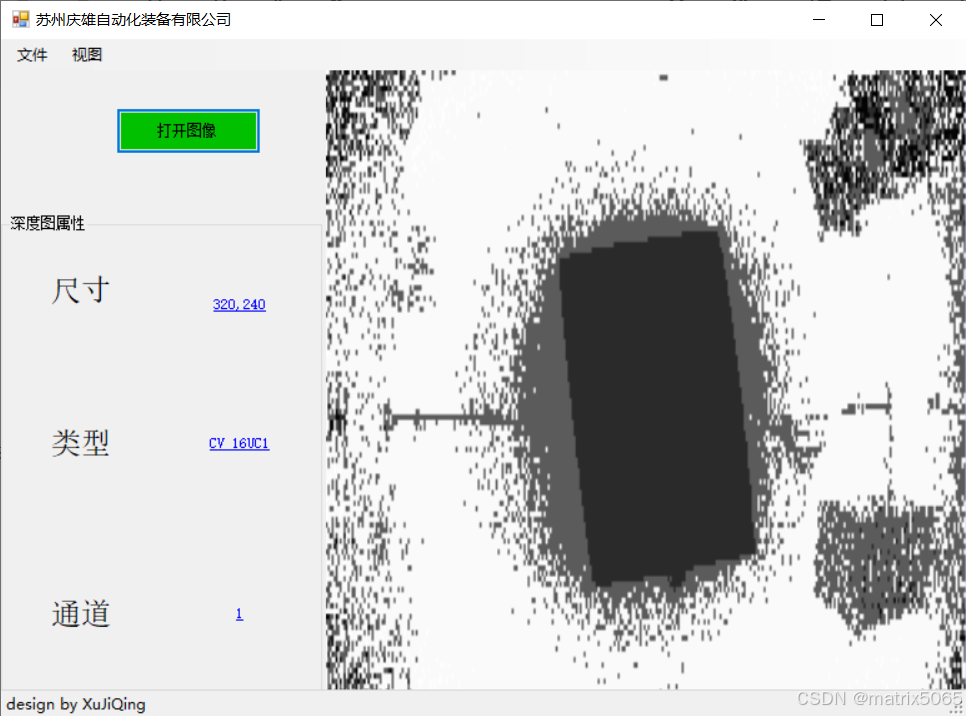
通过我写的工具,展示如图:
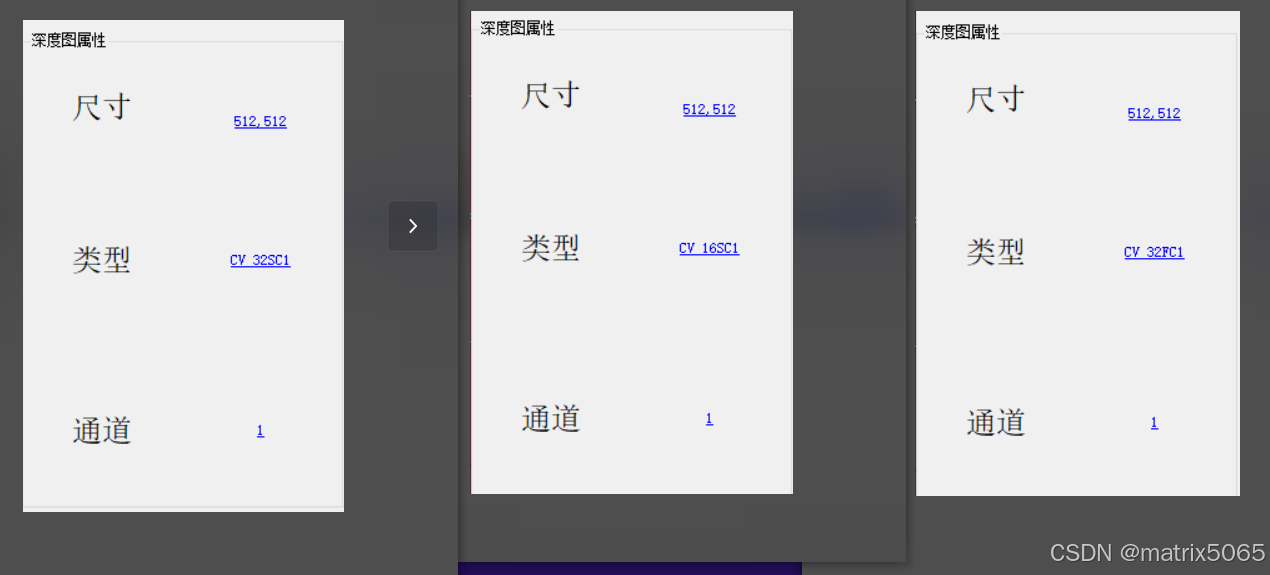
不同类型的图片如下:
由于16bit的深度图不可以直接利用window自带图片工具或者wps图片工具查看,所以为了便捷性,开发此工具:
直接查看,效果如图:
通过我写的工具,展示如图:
不同类型的图片如下:
 1865
1725
1865
1725

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



























