



参考资料 《RT-THREAD 编程指南》2019版本。
调度算法:
C:\Users\EricEdward\Desktop\RT-Thread\rt-thread-stable-v3.0.x\src\scheduler.c
void rt_schedule(void) 函数里 __rt_ffs(rt_thread_ready_priority_group)。
C:\Users\EricEdward\Desktop\RT-Thread\rt-thread-stable-v3.0.x\libcpu\arm\cortex-m7\cpuport.c
__asm int __rt_ffs(int value)
硬件层面:ARM 的前置导零汇编指令
__asm volatile ("clz %0, %1" : "=r" (leading_zeros) : "r" (priority_group));
软件层面:位图算法
1.1 源代码的文件与路径分布
作为一个操作系统,RT-Thread 的代码规模怎么样呢?在弄清楚这些之前,我们先要做的就是获得与本文相对应的 RT-Thread 的例子,这份例子可以从以下链接获得:
这个例子是一个压缩包文件,将它解压,我们这里解压到 D:/。解压完成后的目录结构如下图所示:
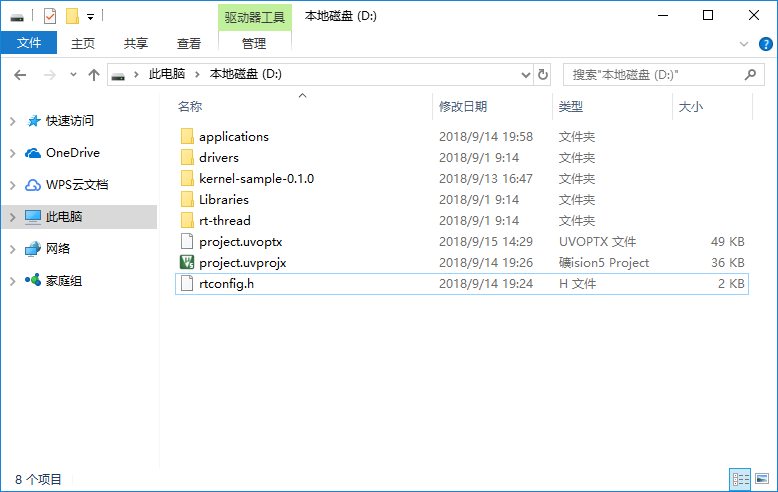
各个目录所包含的文件类型的描述如下表所示:
| 目录名 | 描述 |
|---|---|
| applications | RT-Thread 应用程序。 |
| rt-thread | RT-Thread 的源文件。 |
| - components | RT-Thread 的各个组件目录。 |
| - include | RT-Thread 内核的头文件。 |
| - libcpu | 各类芯片的移植代码,此处包含了 STM32 的移植文件。 |
| - src | RT-Thread 内核的源文件。 |
| - tools | RT-Thread 命令构建工具的脚本文件。 |
| drivers | RT-Thread 的驱动,不同平台的底层驱动具体实现。 |
| Libraries | ST 的 STM32 固件库文件。 |
| kernel-sample-0.1.0 | RT-Thread 的内核例程。 |
在目录下,有一个 project.uvprojx 文件,它是本文内容所引述的例程中的一个 MDK5 工程文件,双击 “project.uvprojx” 图标,打开此工程文件:
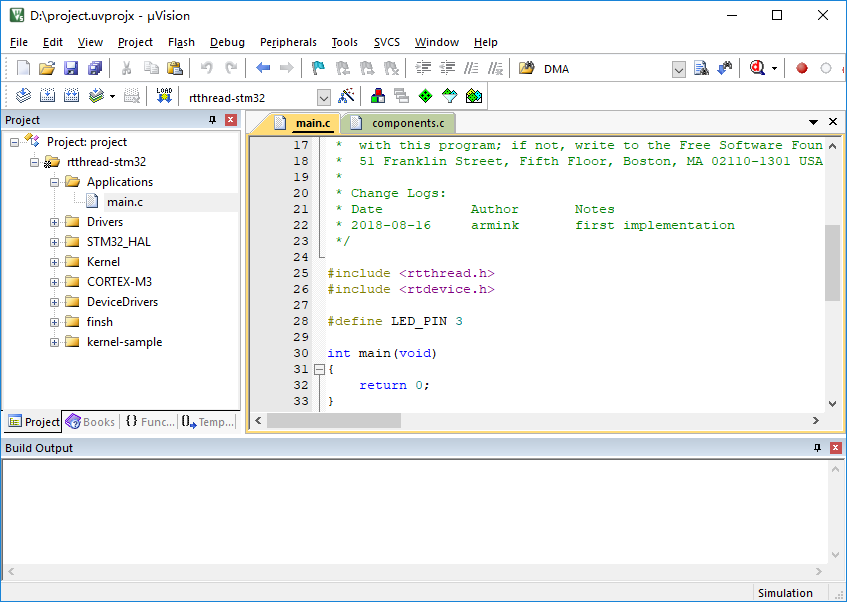
在工程主窗口的左侧 Project 栏里可以看到该工程的文件列表,这些文件被分别存放到如下几个组内,分别是:
| 目录组 | 描述 |
|---|---|
| Applications | 对应的目录为 rtthread_simulator_v0.1.0/applications, 它用于存放用户应用代码。 |
| Drivers | 对应的目录为 rtthread_simulator_v0.1.0/drivers, 它用于存放 RT-Thread 底层的驱动代码。 |
| STM32_HAL | 对应的目录为 rtthread_simulator_v0.1.0/Libraries/CMSIS/Device/ST/STM32F1xx, 它用于存放 STM32 的固件库文件。 |
| kernel-sample | 对应的目录为 rtthread_simulator_v0.1.0/kernel-sample-0.1.0, 它用于存放 RT-Thread 的内核例程。 |
| Kernel | 对应的目录为 rtthread_simulator_v0.1.0/rt-thread/src, 它用于存放 RT-Thread 内核核心代码。 |
| CORTEX-M3 | 对应的目录为 rtthread_simulator_v0.1.0/rt-thread/libcpu, 它用于存放 ARM Cortex-M3 移植代码。 |
| DeviceDrivers | 对应的目录为 rtthread_simulator_v0.1.0/rt-thread/components/drivers, 它用于存放 RT-Thread 驱动框架源码。 |
| finsh | 对应的目录为 rtthread_simulator_v0.1.0/rt-thread/components/finsh, 它用于存放 RT-Thread 命令行 finsh 命令行组件。 |
一般了解一份代码大多从启动部分开始,同样这里也采用这种方式,先寻找启动的源头。以 MDK-ARM 为例,MDK-ARM 的用户程序入口为 main() 函数,位于 main.c 文件中。系统启动后先从汇编代码 startup_stm32f103xe.s 开始运行,然后跳转到 C 代码,进行 RT-Thread 系统功能初始化,最后进入用户程序入口 main()。
下面我们来看看在 components.c 中定义的这段代码:
//components.c 中定义
/* re-define main function */
int $Sub$$main(void)
{
rt_hw_interrupt_disable();
rtthread_startup();
return 0;
}在这里 $Sub$$main 函数仅仅调用了 rtthread_startup() 函数。RT-Thread 支持多种平台和多种编译器,而 rtthread_startup() 函数是 RT-Thread 规定的统一入口点,所以 $Sub$$main 函数只需调用 rtthread_startup() 函数即可。例如采用 GNU GCC 编译器编译的 RT-Thread,就是直接从汇编启动代码部分跳转到 rtthread_startup() 函数中,并开始第一个 C 代码的执行的。
第 2 章 内核基础
2.1 RT-Thread 内核介绍
内核是操作系统最基础也是最重要的部分。下图为 RT-Thread 内核架构图,内核处于硬件层之上,内核部分包括内核库、实时内核实现。
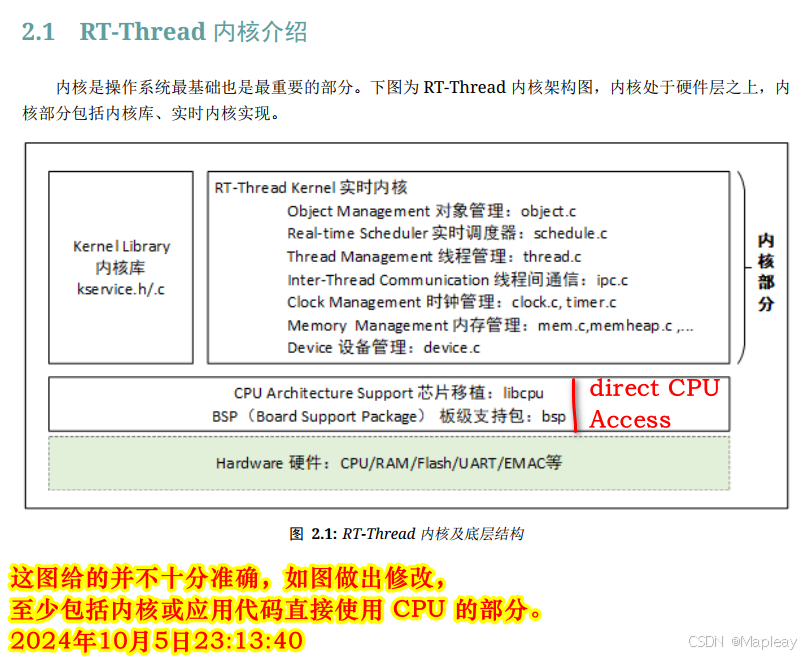
内核库是为了保证内核能够独立运行的一套小型的类似 C 库的函数实现子集。这部分根据编译器的不同自带 C 库的情况也会有些不同,当使用 GNU GCC 编译器时,会携带更多的标准 C 库实现。
实时内核的实现包括:对象管理、线程管理及调度器、线程间通信管理、时钟管理及内存管理等等,内核最小的资源占用情况是 3KB ROM, 1.2KB RAM。
!!! tip “提示” C 库:也叫 C 运行库(C Runtime Library),它提供了类似 “strcpy”、 “memcpy” 等函数,有些也会包括 “printf”、 “scanf” 函数的实现。 RT-Thread Kernel Service Library 仅提供内核用到的一小部分 C 库函数实现,为了避免与标准 C 库重名,在这些函数前都会添加上 rt_ 前缀。
2.1.1 线程调度
线程是 RT-Thread 操作系统中最小的调度单位,线程调度算法是基于优先级的全抢占式多线程调度算法,即在系统中除了中断处理函数、调度器上锁部分的代码和禁止中断的代码是不可抢占的之外,系统的其他部分都是可以抢占的,包括线程调度器自身。支持 256 个线程优先级(也可通过配置文件更改为最大支持 32 个或 8 个线程优先级,针对 STM32 默认配置是 32 个线程优先级), 0 优先级代表最高优先级,最低优先级留给空闲线程使用;同时它也支持创建多个具有相同优先级的线程,相同优先级的线程间采用时间片的轮转调度算法进行调度,使每个线程运行相应时间;另外调度器在寻找那些处于就绪状态的具有最高优先级的线程时,所经历的时间是恒定的,系统也不限制线程数量的多少,线程数目只和硬件平台的具体内存相关。
线程管理将在《线程管理》章节详细介绍。
2.1.2 时钟管理
RT-Thread 的时钟管理以时钟节拍为基础,时钟节拍是 RT-Thread 操作系统中最小的时钟单位。RT-Thread 的定时器提供两类定时器机制:第一类是单次触发定时器,这类定时器在启动后只会触发一次定时器事件,然后定时器自动停止。第二类是周期触发定时器,这类定时器会周期性的触发定时器事件,直到用户手动的停止定时器否则将永远持续执行下去。
另外,根据超时函数执行时所处的上下文环境, RT-Thread 的定时器可以设置为 HARD_TIMER 模式或者 SOFT_TIMER 模式。
通常使用定时器定时回调函数(即超时函数),完成定时服务。用户根据自己对定时处理的实时性要求选择合适类型的定时器。
定时器将在《时钟管理》章节展开讲解。
2.1.3 线程间同步
RT-Thread 采用信号量、互斥量与事件集实现线程间同步。线程通过对信号量、互斥量的获取与释放进行同步;互斥量采用优先级继承的方式解决了实时系统常见的优先级翻转问题。线程同步机制支持线程按优先级等待或按先进先出方式获取信号量或互斥量。线程通过对事件的发送与接收进行同步;事件集支持多事件的 “或触发” 和 “与触发”,适合于线程等待多个事件的情况。
信号量、互斥量与事件集的概念将在《线程间同步》章节详细介绍。
2.1.4 线程间通信
RT-Thread 支持邮箱和消息队列等通信机制。邮箱中一封邮件的长度固定为 4 字节大小;消息队列能够接收不固定长度的消息,并把消息缓存在自己的内存空间中。邮箱效率较消息队列更为高效。邮箱和消息队列的发送动作可安全用于中断服务例程中。通信机制支持线程按优先级等待或按先进先出方式获取。
邮箱和消息队列的概念将在《线程间通信》章节详细介绍。
2.1.5 内存管理
RT-Thread 支持静态内存池管理及动态内存堆管理。当静态内存池具有可用内存时,系统对内存块分配的时间将是恒定的;当静态内存池为空时,系统将申请内存块的线程挂起或阻塞掉 (即线程等待一段时间后仍未获得内存块就放弃申请并返回,或者立刻返回。等待的时间取决于申请内存块时设置的等待时间参数),当其他线程释放内存块到内存池时,如果有挂起的待分配内存块的线程存在的话,则系统会将这个线程唤醒。
动态内存堆管理模块在系统资源不同的情况下,分别提供了面向小内存系统的内存管理算法及面向大内存系统的 SLAB 内存管理算法。
还有一种动态内存堆管理叫做 memheap,适用于系统含有多个地址可不连续的内存堆。使用memheap 可以将多个内存堆 “粘贴” 在一起,让用户操作起来像是在操作一个内存堆。
内存管理的概念将在《内存管理》章节展开讲解。
2.1.6 I/O 设备管理
RT-Thread 将 PIN、 I2C、 SPI、 USB、 UART 等作为外设设备,统一通过设备注册完成。实现了按名称访问的设备管理子系统,可按照统一的 API 界面访问硬件设备。在设备驱动接口上,根据嵌入式系统的特点,对不同的设备可以挂接相应的事件。当设备事件触发时,由驱动程序通知给上层的应用程序。
I/O 设备管理的概念将在《设备模型》及《通用设备》章节展开讲解。
2.1.7 RT-Thread 启动流程
一般了解一份代码大多从启动部分开始,同样这里也采用这种方式,先寻找启动的源头。 RT-Thread支持多种平台和多种编译器,而 rtthread_startup() 函数是 RT-Thread 规定的统一启动入口。一般执行顺序是:系统先从启动文件开始运行,然后进入 RT-Thread 的启动 rtthread_startup() ,最后进入用户入口main(),如下图所示:
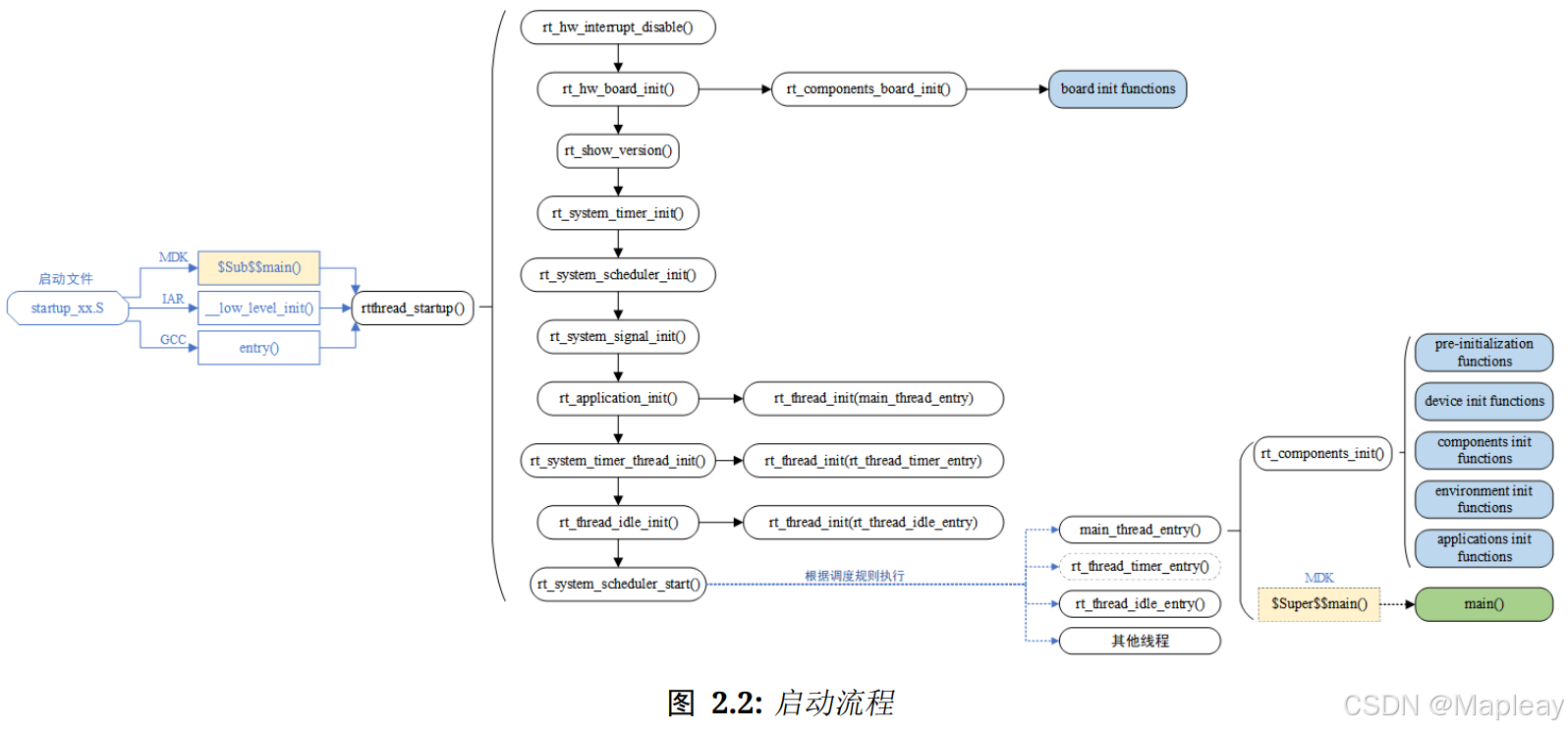
以 MDK-ARM 为例,用户程序入口为 main() 函数,位于 main.c 文件中。系统启动后先从汇编代码startup_stm32f103xe.s 开始运行,然后跳转到 C 代码,进行 RT-Thread 系统启动,最后进入用户程序入口 main()。
为了在进入 main() 之前完成 RT-Thread 系统功能初始化,我们使用了 MDK 的扩展功能 $Sub$$ 和$Super$$。可以给 main 添加 $Sub$$ 的前缀符号作为一个新功能函数 $Sub$$main,这个 $Sub$$main 可以先调用一些要补充在 main 之前的功能函数(这里添加 RT-Thread 系统启动,进行系统一系列初始化),再调用 $Super$$main 转到 main() 函数执行,这样可以让用户不用去管 main() 之前的系统初始化操作。
关于 $Sub$$ 和 $Super$$ 扩展功能的使用,详见 ARM® Compiler v5.06 for µVision®armlink User Guide。
下面我们来看看在 components.c 中定义的这段代码:
/* $Sub$$main 函 数 */
int $Sub$$main(void)
{
rtthread_startup();
return 0;
}在这里 $Sub$$main 函数调用了 rtthread_startup() 函数,其中 rtthread_startup() 函数的代码如下所示:
int rtthread_startup(void)
{
rt_hw_interrupt_disable();
/* 板 级 初 始 化: 需 在 该 函 数 内 部 进 行 系 统 堆 的 初 始 化 */
rt_hw_board_init();
/* 打 印 RT-Thread 版 本 信 息 */
rt_show_version();
/* 定 时 器 初 始 化 */
rt_system_timer_init();
/* 调 度 器 初 始 化 */
rt_system_scheduler_init();
#ifdef RT_USING_SIGNALS
/* 信 号 初 始 化 */
rt_system_signal_init();
#endif
/* 由 此 创 建 一 个 用 户 main 线 程 */
rt_application_init();
/* 定 时 器 线 程 初 始 化 */
rt_system_timer_thread_init();
/* 空 闲 线 程 初 始 化 */
rt_thread_idle_init();
/* 启 动 调 度 器 */
rt_system_scheduler_start();
/* 不 会 执 行 至 此 */
return 0;
}这部分启动代码,大致可以分为四个部分:
(1)初始化与系统相关的硬件;
(2)初始化系统内核对象,例如定时器、调度器、信号;
(3)创建 main 线程,在 main 线程中对各类模块依次进行初始化;
(4)初始化定时器线程、空闲线程,并启动调度器。
启动调度器之前,系统所创建的线程在执行 rt_thread_startup() 后并不会立马运行,它们会处于就绪状态等待系统调度;待启动调度器之后,系统才转入第一个线程开始运行,根据调度规则,选择的是就绪队列中优先级最高的线程。
rt_hw_board_init() 中完成系统时钟设置,为系统提供心跳、串口初始化,将系统输入输出终端绑定到这个串口,后续系统运行信息就会从串口打印出来。
main() 函数是 RT-Thread 的用户代码入口,用户可以在 main() 函数里添加自己的应用。
int main(void)
{
/* user app entry */
return 0;
}注意:初始化与系统相关的硬件。也就是说与系统不相关的硬件不要在这里初始化,通常指的是在应用程序中需要使用到的片上外设模块,比如 DA/AD/USART/SPI/TIMx…… 尤其是硬件定时器TIMx,若在这里初始化且使能了中断,那么系统还没有初始化完成,还没有正式完全接管系统,就可能进入定时器中断函数ISR导致RTOS系统运行出现严重问题,本人已入坑。切记!要初始化这些东西,可以在任务的循环结构之外的上面实施,或者单独另起一个特殊任务实施。
rt-thread 所谓的 libcpu 基本上就是移植 CPU 部分,包括初始化任务栈、任务切换、禁止和使能中断。升级部分可能添加站追踪功能。比如,stm32f407 的 libcpu 库在文件路径 \rt-thread-master\libcpu\arm\cortex-m4\ 中的 context_rvds.S 文件 和 cpuport.c 文件。
C:\rt-thread-master\libcpu\arm\cortex-m4\context_rvds.S
;/*
;* Copyright (c) 2006-2018, RT-Thread Development Team
;*
;* SPDX-License-Identifier: Apache-2.0
;*
; * Change Logs:
; * Date Author Notes
; * 2009-01-17 Bernard first version.
; * 2012-01-01 aozima support context switch load/store FPU register.
; * 2013-06-18 aozima add restore MSP feature.
; * 2013-06-23 aozima support lazy stack optimized.
; * 2018-07-24 aozima enhancement hard fault exception handler.
; */
;/**
; * @addtogroup cortex-m4
; */
;/*@{*/
SCB_VTOR EQU 0xE000ED08 ; Vector Table Offset Register
NVIC_INT_CTRL EQU 0xE000ED04 ; interrupt control state register
NVIC_SYSPRI2 EQU 0xE000ED20 ; system priority register (2)
NVIC_PENDSV_PRI EQU 0xFFFF0000 ; PendSV and SysTick priority value (lowest)
NVIC_PENDSVSET EQU 0x10000000 ; value to trigger PendSV exception
AREA |.text|, CODE, READONLY, ALIGN=2
THUMB
REQUIRE8
PRESERVE8
IMPORT rt_thread_switch_interrupt_flag
IMPORT rt_interrupt_from_thread
IMPORT rt_interrupt_to_thread
;/*
; * rt_base_t rt_hw_interrupt_disable();
; */
rt_hw_interrupt_disable PROC
EXPORT rt_hw_interrupt_disable
MRS r0, PRIMASK
CPSID I
BX LR
ENDP
;/*
; * void rt_hw_interrupt_enable(rt_base_t level);
; */
rt_hw_interrupt_enable PROC
EXPORT rt_hw_interrupt_enable
MSR PRIMASK, r0
BX LR
ENDP
;/*
; * void rt_hw_context_switch(rt_uint32 from, rt_uint32 to);
; * r0 --> from
; * r1 --> to
; */
rt_hw_context_switch_interrupt
EXPORT rt_hw_context_switch_interrupt
rt_hw_context_switch PROC
EXPORT rt_hw_context_switch
; set rt_thread_switch_interrupt_flag to 1
LDR r2, =rt_thread_switch_interrupt_flag
LDR r3, [r2]
CMP r3, #1
BEQ _reswitch
MOV r3, #1
STR r3, [r2]
LDR r2, =rt_interrupt_from_thread ; set rt_interrupt_from_thread
STR r0, [r2]
_reswitch
LDR r2, =rt_interrupt_to_thread ; set rt_interrupt_to_thread
STR r1, [r2]
LDR r0, =NVIC_INT_CTRL ; trigger the PendSV exception (causes context switch)
LDR r1, =NVIC_PENDSVSET
STR r1, [r0]
BX LR
ENDP
; r0 --> switch from thread stack
; r1 --> switch to thread stack
; psr, pc, lr, r12, r3, r2, r1, r0 are pushed into [from] stack
PendSV_Handler PROC
EXPORT PendSV_Handler
; disable interrupt to protect context switch
MRS r2, PRIMASK
CPSID I
; get rt_thread_switch_interrupt_flag
LDR r0, =rt_thread_switch_interrupt_flag
LDR r1, [r0]
CBZ r1, pendsv_exit ; pendsv already handled
; clear rt_thread_switch_interrupt_flag to 0
MOV r1, #0x00
STR r1, [r0]
LDR r0, =rt_interrupt_from_thread
LDR r1, [r0]
CBZ r1, switch_to_thread ; skip register save at the first time
MRS r1, psp ; get from thread stack pointer
IF {FPU} != "SoftVFP"
TST lr, #0x10 ; if(!EXC_RETURN[4])
VSTMFDEQ r1!, {d8 - d15} ; push FPU register s16~s31
ENDIF
STMFD r1!, {r4 - r11} ; push r4 - r11 register
IF {FPU} != "SoftVFP"
MOV r4, #0x00 ; flag = 0
TST lr, #0x10 ; if(!EXC_RETURN[4])
MOVEQ r4, #0x01 ; flag = 1
STMFD r1!, {r4} ; push flag
ENDIF
LDR r0, [r0]
STR r1, [r0] ; update from thread stack pointer
switch_to_thread
LDR r1, =rt_interrupt_to_thread
LDR r1, [r1]
LDR r1, [r1] ; load thread stack pointer
IF {FPU} != "SoftVFP"
LDMFD r1!, {r3} ; pop flag
ENDIF
LDMFD r1!, {r4 - r11} ; pop r4 - r11 register
IF {FPU} != "SoftVFP"
CMP r3, #0 ; if(flag_r3 != 0)
VLDMFDNE r1!, {d8 - d15} ; pop FPU register s16~s31
ENDIF
MSR psp, r1 ; update stack pointer
IF {FPU} != "SoftVFP"
ORR lr, lr, #0x10 ; lr |= (1 << 4), clean FPCA.
CMP r3, #0 ; if(flag_r3 != 0)
BICNE lr, lr, #0x10 ; lr &= ~(1 << 4), set FPCA.
ENDIF
pendsv_exit
; restore interrupt
MSR PRIMASK, r2
ORR lr, lr, #0x04
BX lr
ENDP
;/*
; * void rt_hw_context_switch_to(rt_uint32 to);
; * r0 --> to
; * this fucntion is used to perform the first thread switch
; */
rt_hw_context_switch_to PROC
EXPORT rt_hw_context_switch_to
; set to thread
LDR r1, =rt_interrupt_to_thread
STR r0, [r1]
IF {FPU} != "SoftVFP"
; CLEAR CONTROL.FPCA
MRS r2, CONTROL ; read
BIC r2, #0x04 ; modify
MSR CONTROL, r2 ; write-back
ENDIF
; set from thread to 0
LDR r1, =rt_interrupt_from_thread
MOV r0, #0x0
STR r0, [r1]
; set interrupt flag to 1
LDR r1, =rt_thread_switch_interrupt_flag
MOV r0, #1
STR r0, [r1]
; set the PendSV and SysTick exception priority
LDR r0, =NVIC_SYSPRI2
LDR r1, =NVIC_PENDSV_PRI
LDR.W r2, [r0,#0x00] ; read
ORR r1,r1,r2 ; modify
STR r1, [r0] ; write-back
; trigger the PendSV exception (causes context switch)
LDR r0, =NVIC_INT_CTRL
LDR r1, =NVIC_PENDSVSET
STR r1, [r0]
; restore MSP
LDR r0, =SCB_VTOR
LDR r0, [r0]
LDR r0, [r0]
MSR msp, r0
; enable interrupts at processor level
CPSIE F
CPSIE I
; never reach here!
ENDP
; compatible with old version
rt_hw_interrupt_thread_switch PROC
EXPORT rt_hw_interrupt_thread_switch
BX lr
ENDP
IMPORT rt_hw_hard_fault_exception
EXPORT HardFault_Handler
HardFault_Handler PROC
; get current context
TST lr, #0x04 ; if(!EXC_RETURN[2])
ITE EQ
MRSEQ r0, msp ; [2]=0 ==> Z=1, get fault context from handler.
MRSNE r0, psp ; [2]=1 ==> Z=0, get fault context from thread.
STMFD r0!, {r4 - r11} ; push r4 - r11 register
IF {FPU} != "SoftVFP"
STMFD r0!, {lr} ; push dummy for flag
ENDIF
STMFD r0!, {lr} ; push exec_return register
TST lr, #0x04 ; if(!EXC_RETURN[2])
ITE EQ
MSREQ msp, r0 ; [2]=0 ==> Z=1, update stack pointer to MSP.
MSRNE psp, r0 ; [2]=1 ==> Z=0, update stack pointer to PSP.
PUSH {lr}
BL rt_hw_hard_fault_exception
POP {lr}
ORR lr, lr, #0x04
BX lr
ENDP
ALIGN 4
END
C:\rt-thread-master\libcpu\arm\cortex-m4\cpuport.c
/*
* Copyright (c) 2006-2018, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2011-10-21 Bernard the first version.
* 2011-10-27 aozima update for cortex-M4 FPU.
* 2011-12-31 aozima fixed stack align issues.
* 2012-01-01 aozima support context switch load/store FPU register.
* 2012-12-11 lgnq fixed the coding style.
* 2012-12-23 aozima stack addr align to 8byte.
* 2012-12-29 Bernard Add exception hook.
* 2013-06-23 aozima support lazy stack optimized.
* 2018-07-24 aozima enhancement hard fault exception handler.
* 2019-07-03 yangjie add __rt_ffs() for armclang.
*/
#include <rtthread.h>
#if /* ARMCC */ ( (defined ( __CC_ARM ) && defined ( __TARGET_FPU_VFP )) \
/* Clang */ || (defined ( __CLANG_ARM ) && defined ( __VFP_FP__ ) && !defined(__SOFTFP__)) \
/* IAR */ || (defined ( __ICCARM__ ) && defined ( __ARMVFP__ )) \
/* GNU */ || (defined ( __GNUC__ ) && defined ( __VFP_FP__ ) && !defined(__SOFTFP__)) )
#define USE_FPU 1
#else
#define USE_FPU 0
#endif
/* exception and interrupt handler table */
rt_uint32_t rt_interrupt_from_thread;
rt_uint32_t rt_interrupt_to_thread;
rt_uint32_t rt_thread_switch_interrupt_flag;
/* exception hook */
static rt_err_t (*rt_exception_hook)(void *context) = RT_NULL;
struct exception_stack_frame
{
rt_uint32_t r0;
rt_uint32_t r1;
rt_uint32_t r2;
rt_uint32_t r3;
rt_uint32_t r12;
rt_uint32_t lr;
rt_uint32_t pc;
rt_uint32_t psr;
};
struct stack_frame
{
#if USE_FPU
rt_uint32_t flag;
#endif /* USE_FPU */
/* r4 ~ r11 register */
rt_uint32_t r4;
rt_uint32_t r5;
rt_uint32_t r6;
rt_uint32_t r7;
rt_uint32_t r8;
rt_uint32_t r9;
rt_uint32_t r10;
rt_uint32_t r11;
struct exception_stack_frame exception_stack_frame;
};
struct exception_stack_frame_fpu
{
rt_uint32_t r0;
rt_uint32_t r1;
rt_uint32_t r2;
rt_uint32_t r3;
rt_uint32_t r12;
rt_uint32_t lr;
rt_uint32_t pc;
rt_uint32_t psr;
#if USE_FPU
/* FPU register */
rt_uint32_t S0;
rt_uint32_t S1;
rt_uint32_t S2;
rt_uint32_t S3;
rt_uint32_t S4;
rt_uint32_t S5;
rt_uint32_t S6;
rt_uint32_t S7;
rt_uint32_t S8;
rt_uint32_t S9;
rt_uint32_t S10;
rt_uint32_t S11;
rt_uint32_t S12;
rt_uint32_t S13;
rt_uint32_t S14;
rt_uint32_t S15;
rt_uint32_t FPSCR;
rt_uint32_t NO_NAME;
#endif
};
struct stack_frame_fpu
{
rt_uint32_t flag;
/* r4 ~ r11 register */
rt_uint32_t r4;
rt_uint32_t r5;
rt_uint32_t r6;
rt_uint32_t r7;
rt_uint32_t r8;
rt_uint32_t r9;
rt_uint32_t r10;
rt_uint32_t r11;
#if USE_FPU
/* FPU register s16 ~ s31 */
rt_uint32_t s16;
rt_uint32_t s17;
rt_uint32_t s18;
rt_uint32_t s19;
rt_uint32_t s20;
rt_uint32_t s21;
rt_uint32_t s22;
rt_uint32_t s23;
rt_uint32_t s24;
rt_uint32_t s25;
rt_uint32_t s26;
rt_uint32_t s27;
rt_uint32_t s28;
rt_uint32_t s29;
rt_uint32_t s30;
rt_uint32_t s31;
#endif
struct exception_stack_frame_fpu exception_stack_frame;
};
rt_uint8_t *rt_hw_stack_init(void *tentry,
void *parameter,
rt_uint8_t *stack_addr,
void *texit)
{
struct stack_frame *stack_frame;
rt_uint8_t *stk;
unsigned long i;
stk = stack_addr + sizeof(rt_uint32_t);
stk = (rt_uint8_t *)RT_ALIGN_DOWN((rt_uint32_t)stk, 8);
stk -= sizeof(struct stack_frame);
stack_frame = (struct stack_frame *)stk;
/* init all register */
for (i = 0; i < sizeof(struct stack_frame) / sizeof(rt_uint32_t); i ++)
{
((rt_uint32_t *)stack_frame)[i] = 0xdeadbeef;
}
stack_frame->exception_stack_frame.r0 = (unsigned long)parameter; /* r0 : argument */
stack_frame->exception_stack_frame.r1 = 0; /* r1 */
stack_frame->exception_stack_frame.r2 = 0; /* r2 */
stack_frame->exception_stack_frame.r3 = 0; /* r3 */
stack_frame->exception_stack_frame.r12 = 0; /* r12 */
stack_frame->exception_stack_frame.lr = (unsigned long)texit; /* lr */
stack_frame->exception_stack_frame.pc = (unsigned long)tentry; /* entry point, pc */
stack_frame->exception_stack_frame.psr = 0x01000000L; /* PSR */
#if USE_FPU
stack_frame->flag = 0;
#endif /* USE_FPU */
/* return task's current stack address */
return stk;
}
/**
* This function set the hook, which is invoked on fault exception handling.
*
* @param exception_handle the exception handling hook function.
*/
void rt_hw_exception_install(rt_err_t (*exception_handle)(void *context))
{
rt_exception_hook = exception_handle;
}
#define SCB_CFSR (*(volatile const unsigned *)0xE000ED28) /* Configurable Fault Status Register */
#define SCB_HFSR (*(volatile const unsigned *)0xE000ED2C) /* HardFault Status Register */
#define SCB_MMAR (*(volatile const unsigned *)0xE000ED34) /* MemManage Fault Address register */
#define SCB_BFAR (*(volatile const unsigned *)0xE000ED38) /* Bus Fault Address Register */
#define SCB_AIRCR (*(volatile unsigned long *)0xE000ED0C) /* Reset control Address Register */
#define SCB_RESET_VALUE 0x05FA0004 /* Reset value, write to SCB_AIRCR can reset cpu */
#define SCB_CFSR_MFSR (*(volatile const unsigned char*)0xE000ED28) /* Memory-management Fault Status Register */
#define SCB_CFSR_BFSR (*(volatile const unsigned char*)0xE000ED29) /* Bus Fault Status Register */
#define SCB_CFSR_UFSR (*(volatile const unsigned short*)0xE000ED2A) /* Usage Fault Status Register */
#ifdef RT_USING_FINSH
static void usage_fault_track(void)
{
rt_kprintf("usage fault:\n");
rt_kprintf("SCB_CFSR_UFSR:0x%02X ", SCB_CFSR_UFSR);
if(SCB_CFSR_UFSR & (1<<0))
{
/* [0]:UNDEFINSTR */
rt_kprintf("UNDEFINSTR ");
}
if(SCB_CFSR_UFSR & (1<<1))
{
/* [1]:INVSTATE */
rt_kprintf("INVSTATE ");
}
if(SCB_CFSR_UFSR & (1<<2))
{
/* [2]:INVPC */
rt_kprintf("INVPC ");
}
if(SCB_CFSR_UFSR & (1<<3))
{
/* [3]:NOCP */
rt_kprintf("NOCP ");
}
if(SCB_CFSR_UFSR & (1<<8))
{
/* [8]:UNALIGNED */
rt_kprintf("UNALIGNED ");
}
if(SCB_CFSR_UFSR & (1<<9))
{
/* [9]:DIVBYZERO */
rt_kprintf("DIVBYZERO ");
}
rt_kprintf("\n");
}
static void bus_fault_track(void)
{
rt_kprintf("bus fault:\n");
rt_kprintf("SCB_CFSR_BFSR:0x%02X ", SCB_CFSR_BFSR);
if(SCB_CFSR_BFSR & (1<<0))
{
/* [0]:IBUSERR */
rt_kprintf("IBUSERR ");
}
if(SCB_CFSR_BFSR & (1<<1))
{
/* [1]:PRECISERR */
rt_kprintf("PRECISERR ");
}
if(SCB_CFSR_BFSR & (1<<2))
{
/* [2]:IMPRECISERR */
rt_kprintf("IMPRECISERR ");
}
if(SCB_CFSR_BFSR & (1<<3))
{
/* [3]:UNSTKERR */
rt_kprintf("UNSTKERR ");
}
if(SCB_CFSR_BFSR & (1<<4))
{
/* [4]:STKERR */
rt_kprintf("STKERR ");
}
if(SCB_CFSR_BFSR & (1<<7))
{
rt_kprintf("SCB->BFAR:%08X\n", SCB_BFAR);
}
else
{
rt_kprintf("\n");
}
}
static void mem_manage_fault_track(void)
{
rt_kprintf("mem manage fault:\n");
rt_kprintf("SCB_CFSR_MFSR:0x%02X ", SCB_CFSR_MFSR);
if(SCB_CFSR_MFSR & (1<<0))
{
/* [0]:IACCVIOL */
rt_kprintf("IACCVIOL ");
}
if(SCB_CFSR_MFSR & (1<<1))
{
/* [1]:DACCVIOL */
rt_kprintf("DACCVIOL ");
}
if(SCB_CFSR_MFSR & (1<<3))
{
/* [3]:MUNSTKERR */
rt_kprintf("MUNSTKERR ");
}
if(SCB_CFSR_MFSR & (1<<4))
{
/* [4]:MSTKERR */
rt_kprintf("MSTKERR ");
}
if(SCB_CFSR_MFSR & (1<<7))
{
/* [7]:MMARVALID */
rt_kprintf("SCB->MMAR:%08X\n", SCB_MMAR);
}
else
{
rt_kprintf("\n");
}
}
static void hard_fault_track(void)
{
if(SCB_HFSR & (1UL<<1))
{
/* [1]:VECTBL, Indicates hard fault is caused by failed vector fetch. */
rt_kprintf("failed vector fetch\n");
}
if(SCB_HFSR & (1UL<<30))
{
/* [30]:FORCED, Indicates hard fault is taken because of bus fault,
memory management fault, or usage fault. */
if(SCB_CFSR_BFSR)
{
bus_fault_track();
}
if(SCB_CFSR_MFSR)
{
mem_manage_fault_track();
}
if(SCB_CFSR_UFSR)
{
usage_fault_track();
}
}
if(SCB_HFSR & (1UL<<31))
{
/* [31]:DEBUGEVT, Indicates hard fault is triggered by debug event. */
rt_kprintf("debug event\n");
}
}
#endif /* RT_USING_FINSH */
struct exception_info
{
rt_uint32_t exc_return;
struct stack_frame stack_frame;
};
void rt_hw_hard_fault_exception(struct exception_info *exception_info)
{
extern long list_thread(void);
struct exception_stack_frame *exception_stack = &exception_info->stack_frame.exception_stack_frame;
struct stack_frame *context = &exception_info->stack_frame;
if (rt_exception_hook != RT_NULL)
{
rt_err_t result;
result = rt_exception_hook(exception_stack);
if (result == RT_EOK) return;
}
rt_kprintf("psr: 0x%08x\n", context->exception_stack_frame.psr);
rt_kprintf("r00: 0x%08x\n", context->exception_stack_frame.r0);
rt_kprintf("r01: 0x%08x\n", context->exception_stack_frame.r1);
rt_kprintf("r02: 0x%08x\n", context->exception_stack_frame.r2);
rt_kprintf("r03: 0x%08x\n", context->exception_stack_frame.r3);
rt_kprintf("r04: 0x%08x\n", context->r4);
rt_kprintf("r05: 0x%08x\n", context->r5);
rt_kprintf("r06: 0x%08x\n", context->r6);
rt_kprintf("r07: 0x%08x\n", context->r7);
rt_kprintf("r08: 0x%08x\n", context->r8);
rt_kprintf("r09: 0x%08x\n", context->r9);
rt_kprintf("r10: 0x%08x\n", context->r10);
rt_kprintf("r11: 0x%08x\n", context->r11);
rt_kprintf("r12: 0x%08x\n", context->exception_stack_frame.r12);
rt_kprintf(" lr: 0x%08x\n", context->exception_stack_frame.lr);
rt_kprintf(" pc: 0x%08x\n", context->exception_stack_frame.pc);
if (exception_info->exc_return & (1 << 2))
{
rt_kprintf("hard fault on thread: %s\r\n\r\n", rt_thread_self()->name);
#ifdef RT_USING_FINSH
list_thread();
#endif
}
else
{
rt_kprintf("hard fault on handler\r\n\r\n");
}
if ( (exception_info->exc_return & 0x10) == 0)
{
rt_kprintf("FPU active!\r\n");
}
#ifdef RT_USING_FINSH
hard_fault_track();
#endif /* RT_USING_FINSH */
while (1);
}
/**
* shutdown CPU
*/
RT_WEAK void rt_hw_cpu_shutdown(void)
{
rt_kprintf("shutdown...\n");
RT_ASSERT(0);
}
/**
* reset CPU
*/
RT_WEAK void rt_hw_cpu_reset(void)
{
SCB_AIRCR = SCB_RESET_VALUE;
}
#ifdef RT_USING_CPU_FFS
/**
* This function finds the first bit set (beginning with the least significant bit)
* in value and return the index of that bit.
*
* Bits are numbered starting at 1 (the least significant bit). A return value of
* zero from any of these functions means that the argument was zero.
*
* @return return the index of the first bit set. If value is 0, then this function
* shall return 0.
*/
#if defined(__CC_ARM)
__asm int __rt_ffs(int value)
{
CMP r0, #0x00
BEQ exit
RBIT r0, r0
CLZ r0, r0
ADDS r0, r0, #0x01
exit
BX lr
}
#elif defined(__CLANG_ARM)
int __rt_ffs(int value)
{
__asm volatile(
"CMP r0, #0x00 \n"
"BEQ 1f \n"
"RBIT r0, r0 \n"
"CLZ r0, r0 \n"
"ADDS r0, r0, #0x01 \n"
"1: \n"
: "=r"(value)
: "r"(value)
);
return value;
}
#elif defined(__IAR_SYSTEMS_ICC__)
int __rt_ffs(int value)
{
if (value == 0) return value;
asm("RBIT %0, %1" : "=r"(value) : "r"(value));
asm("CLZ %0, %1" : "=r"(value) : "r"(value));
asm("ADDS %0, %1, #0x01" : "=r"(value) : "r"(value));
return value;
}
#elif defined(__GNUC__)
int __rt_ffs(int value)
{
return __builtin_ffs(value);
}
#endif
#endif
rt-thread的任务上下文切换
; r0 --> switch from thread stack
; r1 --> switch to thread stack
; psr, pc, lr, r12, r3, r2, r1, r0 are pushed into [from] stack
PendSV_Handler PROC ;PendSV的中断处理操作
EXPORT PendSV_Handler ;对外输出 PendSV_Handler 操作接口
; 首先,除能中断,保证任务切换操作不被打断
MRS r2, PRIMASK
CPSID I
; 第二,获取 rt_thread_switch_interrupt_flag 标志变量
LDR r0, =rt_thread_switch_interrupt_flag
LDR r1, [r0]
CBZ r1, pendsv_exit ; pendsv already handled
; 第三,清除 clear rt_thread_switch_interrupt_flag 标志变量,设置为零
MOV r1, #0x00
STR r1, [r0]
; 第四,保存旧任务的上下文
LDR r0, =rt_interrupt_from_thread
LDR r1, [r0]
CBZ r1, switch_to_thread ; skip register save at the first time
MRS r1, psp ; 取得线程的栈指针
STMFD r1!, {r4 - r11} ; push r4 - r11 register
LDR r0, [r0]
STR r1, [r0] ; 更新线程的栈指针
; 第五,切换到新任务的上下文
switch_to_thread
LDR r1, =rt_interrupt_to_thread
LDR r1, [r1]
LDR r1, [r1] ; 加载线程的堆栈指针
LDMFD r1!, {r4 - r11} ; pop r4 - r11 register
MSR psp, r1 ; 刷新栈指针
; 第六,恢复中断状态,并切入新任务
pendsv_exit
; 恢复中断状态
MSR PRIMASK, r2
ORR lr, lr, #0x04
BX lr
ENDP2.1.8 RT-Thread 自动初始化机制
自动初始化机制是指初始化函数不需要被显式调用,只需要在函数定义处通过宏定义的方式进行申明,就会在系统启动过程中被执行。
例如在串口驱动中调用一个宏定义告知系统初始化需要调用的函数,代码如下:
int rt_hw_usart_init(void) /* 串口初始化函数 */
{
... ...
/* 注册串口 1 设备 */
rt_hw_serial_register(&serial1, "uart1",
RT_DEVICE_FLAG_RDWR | RT_DEVICE_FLAG_INT_RX,
uart);
return 0;
}
INIT_BOARD_EXPORT(rt_hw_usart_init); /* 使用组件自动初始化机制 */复制错误复制成功示例代码最后的 INIT_BOARD_EXPORT(rt_hw_usart_init) 表示使用自动初始化功能,按照这种方式,rt_hw_usart_init() 函数就会被系统自动调用,那么它是在哪里被调用的呢?
在系统启动流程图中,有两个函数:rt_components_board_init() 与 rt_components_init(),其后的带底色方框内部的函数表示被自动初始化的函数,其中:
-
“board init functions” 为所有通过 INIT_BOARD_EXPORT(fn) 申明的初始化函数。
-
“pre-initialization functions” 为所有通过 INIT_PREV_EXPORT(fn)申明的初始化函数。
-
“device init functions” 为所有通过 INIT_DEVICE_EXPORT(fn) 申明的初始化函数。
-
“components init functions” 为所有通过 INIT_COMPONENT_EXPORT(fn)申明的初始化函数。
-
“enviroment init functions” 为所有通过 INIT_ENV_EXPORT(fn) 申明的初始化函数。
-
“application init functions” 为所有通过 INIT_APP_EXPORT(fn)申明的初始化函数。
rt_components_board_init() 函数执行的比较早,主要初始化相关硬件环境,执行这个函数时将会遍历通过 INIT_BOARD_EXPORT(fn) 申明的初始化函数表,并调用各个函数。
rt_components_init() 函数会在操作系统运行起来之后创建的 main 线程里被调用执行,这个时候硬件环境和操作系统已经初始化完成,可以执行应用相关代码。rt_components_init() 函数会遍历通过剩下的其他几个宏申明的初始化函数表。
RT-Thread 的自动初始化机制使用了自定义 RTI 符号段,将需要在启动时进行初始化的函数指针放到了该段中,形成一张初始化函数表,在系统启动过程中会遍历该表,并调用表中的函数,达到自动初始化的目的。
用来实现自动初始化功能的宏接口定义详细描述如下表所示:
| 初始化顺序 | 宏接口 | 描述 |
|---|---|---|
| 1 | INIT_BOARD_EXPORT(fn) | 非常早期的初始化,此时调度器还未启动 |
| 2 | INIT_PREV_EXPORT(fn) | 主要是用于纯软件的初始化、没有太多依赖的函数 |
| 3 | INIT_DEVICE_EXPORT(fn) | 外设驱动初始化相关,比如网卡设备 |
| 4 | INIT_COMPONENT_EXPORT(fn) | 组件初始化,比如文件系统或者 LWIP |
| 5 | INIT_ENV_EXPORT(fn) | 系统环境初始化,比如挂载文件系统 |
| 6 | INIT_APP_EXPORT(fn) | 应用初始化,比如 GUI 应用 |
初始化函数主动通过这些宏接口进行申明,如 INIT_BOARD_EXPORT(rt_hw_usart_init),链接器会自动收集所有被申明的初始化函数,放到 RTI 符号段中,该符号段位于内存分布的 RO 段中,该 RTI 符号段中的所有函数在系统初始化时会被自动调用。
RT-Thread 内核对象模型
静态对象和动态对象
RT-Thread 内核采用面向对象的设计思想进行设计,系统级的基础设施都是一种内核对象,例如线程,信号量,互斥量,定时器等。内核对象分为两类:静态内核对象和动态内核对象,静态内核对象通常放在 RW 段和 ZI 段中,在系统启动后在程序中初始化;动态内核对象则是从内存堆中创建的,而后手工做初始化。
以下代码是一个关于静态线程和动态线程的例子:
/* 线程 1 的对象和运行时用到的栈 */
static struct rt_thread thread1;
static rt_uint8_t thread1_stack[512];
/* 线程 1 入口 */
void thread1_entry(void* parameter)
{
int i;
while (1)
{
for (i = 0; i < 10; i ++)
{
rt_kprintf("%d\n", i);
/* 延时 100ms */
rt_thread_mdelay(100);
}
}
}
/* 线程 2 入口 */
void thread2_entry(void* parameter)
{
int count = 0;
while (1)
{
rt_kprintf("Thread2 count:%d\n", ++count);
/* 延时 50ms */
rt_thread_mdelay(50);
}
}
/* 线程例程初始化 */
int thread_sample_init()
{
rt_thread_t thread2_ptr;
rt_err_t result;
/* 初始化线程 1 */
/* 线程的入口是 thread1_entry,参数是 RT_NULL
* 线程栈是 thread1_stack
* 优先级是 200,时间片是 10 个 OS Tick
*/
result = rt_thread_init(&thread1,
"thread1",
thread1_entry, RT_NULL,
&thread1_stack[0], sizeof(thread1_stack),
200, 10);
/* 启动线程 */
if (result == RT_EOK) rt_thread_startup(&thread1);
/* 创建线程 2 */
/* 线程的入口是 thread2_entry, 参数是 RT_NULL
* 栈空间是 512,优先级是 250,时间片是 25 个 OS Tick
*/
thread2_ptr = rt_thread_create("thread2",
thread2_entry, RT_NULL,
512, 250, 25);
/* 启动线程 */
if (thread2_ptr != RT_NULL) rt_thread_startup(thread2_ptr);
return 0;
}复制错误复制成功在这个例子中,thread1 是一个静态线程对象,而 thread2 是一个动态线程对象。thread1 对象的内存空间,包括线程控制块 thread1 与栈空间 thread1_stack 都是编译时决定的,因为代码中都不存在初始值,都统一放在未初始化数据段中。thread2 运行中用到的空间都是动态分配的,包括线程控制块(thread2_ptr 指向的内容)和栈空间。
静态对象会占用 RAM 空间,不依赖于内存堆管理器,内存分配时间确定。动态对象则依赖于内存堆管理器,运行时申请 RAM 空间,当对象被删除后,占用的 RAM 空间被释放。这两种方式各有利弊,可以根据实际环境需求选择具体使用方式。
内核对象管理架构
RT-Thread 采用内核对象管理系统来访问 / 管理所有内核对象,内核对象包含了内核中绝大部分设施,这些内核对象可以是静态分配的静态对象,也可以是从系统内存堆中分配的动态对象。
通过这种内核对象的设计方式,RT-Thread 做到了不依赖于具体的内存分配方式,系统的灵活性得到极大的提高。
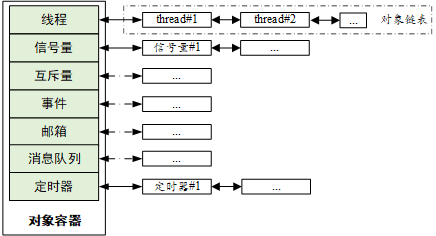
RT-Thread 内核对象包括:线程,信号量,互斥量,事件,邮箱,消息队列和定时器,内存池,设备驱动等。对象容器中包含了每类内核对象的信息,包括对象类型,大小等。对象容器给每类内核对象分配了一个链表,所有的内核对象都被链接到该链表上,RT-Thread 的内核对象容器及链表如下图所示:
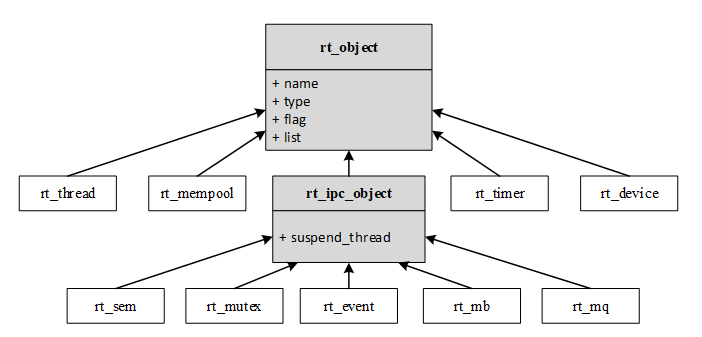
下图则显示了 RT-Thread 中各类内核对象的派生和继承关系。对于每一种具体内核对象和对象控制块,除了基本结构外,还有自己的扩展属性(私有属性),例如,对于线程控制块,在基类对象基础上进行扩展,增加了线程状态、优先级等属性。这些属性在基类对象的操作中不会用到,只有在与具体线程相关的操作中才会使用。因此从面向对象的观点,可以认为每一种具体对象是抽象对象的派生,继承了基本对象的属性并在此基础上扩展了与自己相关的属性。
在对象管理模块中,定义了通用的数据结构,用来保存各种对象的共同属性,各种具体对象只需要在此基础上加上自己的某些特别的属性,就可以清楚的表示自己的特征。
这种设计方法的优点有:
(1)提高了系统的可重用性和扩展性,增加新的对象类别很容易,只需要继承通用对象的属性再加少量扩展即可。
(2)提供统一的对象操作方式,简化了各种具体对象的操作,提高了系统的可靠性。
上图中由对象控制块 rt_object 派生出来的有:线程对象、内存池对象、定时器对象、设备对象和 IPC 对象(IPC:Inter-Process Communication,进程间通信。在 RT-Thread 实时操作系统中,IPC 对象的作用是进行线程间同步与通信);由 IPC 对象派生出信号量、互斥量、事件、邮箱与消息队列、信号等对象。
对象控制块
内核对象控制块的数据结构:
struct rt_object
{
/* 内核对象名称 */
char name[RT_NAME_MAX];
/* 内核对象类型 */
rt_uint8_t type;
/* 内核对象的参数 */
rt_uint8_t flag;
/* 内核对象管理链表 */
rt_list_t list;
};复制错误复制成功目前内核对象支持的类型如下:
enum rt_object_class_type
{
RT_Object_Class_Thread = 0, /* 对象为线程类型 */
#ifdef RT_USING_SEMAPHORE
RT_Object_Class_Semaphore, /* 对象为信号量类型 */
#endif
#ifdef RT_USING_MUTEX
RT_Object_Class_Mutex, /* 对象为互斥量类型 */
#endif
#ifdef RT_USING_EVENT
RT_Object_Class_Event, /* 对象为事件类型 */
#endif
#ifdef RT_USING_MAILBOX
RT_Object_Class_MailBox, /* 对象为邮箱类型 */
#endif
#ifdef RT_USING_MESSAGEQUEUE
RT_Object_Class_MessageQueue, /* 对象为消息队列类型 */
#endif
#ifdef RT_USING_MEMPOOL
RT_Object_Class_MemPool, /* 对象为内存池类型 */
#endif
#ifdef RT_USING_DEVICE
RT_Object_Class_Device, /* 对象为设备类型 */
#endif
RT_Object_Class_Timer, /* 对象为定时器类型 */
#ifdef RT_USING_MODULE
RT_Object_Class_Module, /* 对象为模块 */
#endif
RT_Object_Class_Unknown, /* 对象类型未知 */
RT_Object_Class_Static = 0x80 /* 对象为静态对象 */
};复制错误复制成功从上面的类型说明,我们可以看出,如果是静态对象,那么对象类型的最高位将是 1(是 RT_Object_Class_Static 与其他对象类型的或操作),否则就是动态对象,系统最多能够容纳的对象类别数目是 127 个。
内核对象管理方式
内核对象容器的数据结构:
struct rt_object_information
{
/* 对象类型 */
enum rt_object_class_type type;
/* 对象链表 */
rt_list_t object_list;
/* 对象大小 */
rt_size_t object_size;
};复制错误复制成功一类对象由一个 rt_object_information 结构体来管理,每一个这类对象的具体实例都通过链表的形式挂接在 object_list 上。而这一类对象的内存块尺寸由 object_size 标识出来(每一类对象的具体实例,他们占有的内存块大小都是相同的)。
初始化对象
在使用一个未初始化的静态对象前必须先对其进行初始化。初始化对象使用以下接口:
void rt_object_init(struct rt_object* object ,
enum rt_object_class_type type ,
const char* name)复制错误复制成功当调用这个函数进行对象初始化时,系统会把这个对象放置到对象容器中进行管理,即初始化对象的一些参数,然后把这个对象节点插入到对象容器的对象链表中,对该函数的输入参数的描述如下表:
| 参数 | 描述 |
|---|---|
| object | 需要初始化的对象指针,它必须指向具体的对象内存块,而不能是空指针或野指针 |
| type | 对象的类型,必须是 rt_object_class_type 枚举类型中列出的除 RT_Object_Class_Static 以外的类型(对于静态对象,或使用 rt_object_init 接口进行初始化的对象,系统会把它标识成 RT_Object_Class_Static 类型) |
| name | 对象的名字。每个对象可以设置一个名字,这个名字的最大长度由 RT_NAME_MAX 指定,并且系统不关心它是否是由’\0’做为终结符 |
脱离对象
从内核对象管理器中脱离一个对象。脱离对象使用以下接口:
void rt_object_detach(rt_object_t object);复制错误复制成功调用该接口,可使得一个静态内核对象从内核对象容器中脱离出来,即从内核对象容器链表上删除相应的对象节点。对象脱离后,对象占用的内存并不会被释放。
分配对象
上述描述的都是对象初始化、脱离的接口,都是面向对象内存块已经有的情况下,而动态的对象则可以在需要时申请,不需要时释放出内存空间给其他应用使用。申请分配新的对象可以使用以下接口:
rt_object_t rt_object_allocate(enum rt_object_class_type type ,
const char* name)复制错误复制成功在调用以上接口时,系统首先需要根据对象类型来获取对象信息(特别是对象类型的大小信息以用于系统能够分配正确大小的内存数据块),而后从内存堆中分配对象所对应大小的内存空间,然后再对该对象进行必要的初始化,最后将其插入到它所在的对象容器链表中。对该函数的输入参数的描述如下表:
| 参数 | 描述 |
|---|---|
| type | 分配对象的类型,只能是 rt_object_class_type 中除 RT_Object_Class_Static 以外的类型。并且经过这个接口分配出来的对象类型是动态的,而不是静态的 |
| name | 对象的名字。每个对象可以设置一个名字,这个名字的最大长度由 RT_NAME_MAX 指定,并且系统不关心它是否是由’\0’做为终结符 |
| 返回 | —— |
| 分配成功的对象句柄 | 分配成功 |
| RT_NULL | 分配失败 |
删除对象
对于一个动态对象,当不再使用时,可以调用如下接口删除对象,并释放相应的系统资源:
void rt_object_delete(rt_object_t object);复制错误复制成功当调用以上接口时,首先从对象容器链表中脱离对象,然后释放对象所占用的内存。对该函数的输入参数的描述下表:
| 参数 | 描述 |
|---|---|
| object | 对象的句柄 |
辨别对象
判断指定对象是否是系统对象(静态内核对象)。辨别对象使用以下接口:
rt_err_t rt_object_is_systemobject(rt_object_t object);复制错误复制成功调用 rt_object_is_systemobject 接口可判断一个对象是否是系统对象,在 RT-Thread 操作系统中,一个系统对象也就是一个静态对象,对象类型标识上 RT_Object_Class_Static 位置位。通常使用 rt_object_init() 方式初始化的对象都是系统对象。对该函数的输入参数的描述如下表:
rt_object_is_systemobject() 的输入参数
| 参数 | 描述 |
|---|---|
| object | 对象的句柄 |
如何遍历内核对象
以遍历所有线程为例:
注意:RT-Thread5.0 及更高版本将
struct rt_thread结构体的 name 成员移到了 parent 里,使用时代码需要由thread->name更改为thread->parent.name,否则编译会报错!
rt_thread_t thread = RT_NULL;
struct rt_list_node *node = RT_NULL;
struct rt_object_information *information = RT_NULL;
information = rt_object_get_information(RT_Object_Class_Thread);
rt_list_for_each(node, &(information->object_list))
{
thread = (rt_thread_t)rt_list_entry(node, struct rt_object, list);
/* 比如打印所有thread的名字 */
rt_kprintf("name:%s\n", thread->name);
}复制错误复制成功再以遍历所有互斥量为例:
rt_mutex_t mutex = RT_NULL;
struct rt_list_node *node = RT_NULL;
struct rt_object_information *information = RT_NULL;
information = rt_object_get_information(RT_Object_Class_Mutex);
rt_list_for_each(node, &(information->object_list))
{
mutex = (rt_mutex_t)rt_list_entry(node, struct rt_object, list);
/* 比如打印所有mutex的名字 */
rt_kprintf("name:%s\n", mutex->parent.parent.name);
}复制错误复制成功RT-Thread 的一个重要特性是高度可裁剪性,支持对内核进行精细调整,对组件进行灵活拆卸。
配置主要是通过修改工程目录下的 rtconfig.h 文件来进行,用户可以通过打开 / 关闭该文件中的宏定义来对代码进行条件编译,最终达到系统配置和裁剪的目的,如下:
(1)RT-Thread 内核部分
/* 表示内核对象的名称的最大长度,若代码中对象名称的最大长度大于宏定义的长度,
* 多余的部分将被截掉。*/
#define RT_NAME_MAX 8
/* 字节对齐时设定对齐的字节个数。常使用 ALIGN(RT_ALIGN_SIZE) 进行字节对齐。*/
#define RT_ALIGN_SIZE 4
/* 定义系统线程优先级数;通常用 RT_THREAD_PRIORITY_MAX-1 定义空闲线程的优先级 */
#define RT_THREAD_PRIORITY_MAX 32
/* 定义时钟节拍,为 100 时表示 100 个 tick 每秒,一个 tick 为 10ms */
#define RT_TICK_PER_SECOND 100
/* 检查栈是否溢出,未定义则关闭 */
#define RT_USING_OVERFLOW_CHECK
/* 定义该宏开启 debug 模式,未定义则关闭 */
#define RT_DEBUG
/* 开启 debug 模式时:该宏定义为 0 时表示关闭打印组件初始化信息,定义为 1 时表示启用 */
#define RT_DEBUG_INIT 0
/* 开启 debug 模式时:该宏定义为 0 时表示关闭打印线程切换信息,定义为 1 时表示启用 */
#define RT_DEBUG_THREAD 0
/* 定义该宏表示开启钩子函数的使用,未定义则关闭 */
#define RT_USING_HOOK
/* 定义了空闲线程的栈大小 */
#define IDLE_THREAD_STACK_SIZE 256复制错误复制成功(2)线程间同步与通信部分,该部分会使用到的对象有信号量、互斥量、事件、邮箱、消息队列、信号等。
/* 定义该宏可开启信号量的使用,未定义则关闭 */
#define RT_USING_SEMAPHORE
/* 定义该宏可开启互斥量的使用,未定义则关闭 */
#define RT_USING_MUTEX
/* 定义该宏可开启事件集的使用,未定义则关闭 */
#define RT_USING_EVENT
/* 定义该宏可开启邮箱的使用,未定义则关闭 */
#define RT_USING_MAILBOX
/* 定义该宏可开启消息队列的使用,未定义则关闭 */
#define RT_USING_MESSAGEQUEUE
/* 定义该宏可开启信号的使用,未定义则关闭 */
#define RT_USING_SIGNALS复制错误复制成功(3)内存管理部分
/* 开启静态内存池的使用 */
#define RT_USING_MEMPOOL
/* 定义该宏可开启两个或以上内存堆拼接的使用,未定义则关闭 */
#define RT_USING_MEMHEAP
/* 开启小内存管理算法 */
#define RT_USING_SMALL_MEM
/* 关闭 SLAB 内存管理算法 */
/* #define RT_USING_SLAB */
/* 开启堆的使用 */
#define RT_USING_HEAP复制错误复制成功(4)内核设备对象
/* 表示开启了系统设备的使用 */
#define RT_USING_DEVICE
/* 定义该宏可开启系统控制台设备的使用,未定义则关闭 */
#define RT_USING_CONSOLE
/* 定义控制台设备的缓冲区大小 */
#define RT_CONSOLEBUF_SIZE 128
/* 控制台设备的名称 */
#define RT_CONSOLE_DEVICE_NAME "uart1"复制错误复制成功(5)自动初始化方式
/* 定义该宏开启自动初始化机制,未定义则关闭 */
#define RT_USING_COMPONENTS_INIT
/* 定义该宏开启设置应用入口为 main 函数 */
#define RT_USING_USER_MAIN
/* 定义 main 线程的栈大小 */
#define RT_MAIN_THREAD_STACK_SIZE 2048复制错误复制成功(6)FinSH
/* 定义该宏可开启系统 FinSH 调试工具的使用,未定义则关闭 */
#define RT_USING_FINSH
/* 开启系统 FinSH 时:将该线程名称定义为 tshell */
#define FINSH_THREAD_NAME "tshell"
/* 开启系统 FinSH 时:使用历史命令 */
#define FINSH_USING_HISTORY
/* 开启系统 FinSH 时:对历史命令行数的定义 */
#define FINSH_HISTORY_LINES 5
/* 开启系统 FinSH 时:定义该宏开启使用 Tab 键,未定义则关闭 */
#define FINSH_USING_SYMTAB
/* 开启系统 FinSH 时:定义该线程的优先级 */
#define FINSH_THREAD_PRIORITY 20
/* 开启系统 FinSH 时:定义该线程的栈大小 */
#define FINSH_THREAD_STACK_SIZE 4096
/* 开启系统 FinSH 时:定义命令字符长度 */
#define FINSH_CMD_SIZE 80
/* 开启系统 FinSH 时:定义该宏开启 MSH 功能 */
#define FINSH_USING_MSH
/* 开启系统 FinSH 时:开启 MSH 功能时,定义该宏默认使用 MSH 功能 */
#define FINSH_USING_MSH_DEFAULT
/* 开启系统 FinSH 时:定义该宏,仅使用 MSH 功能 */
#define FINSH_USING_MSH_ONLY复制错误复制成功(7)关于 MCU
/* 定义该工程使用的 MCU 为 STM32F103ZE;系统通过对芯片类型的定义,来定义芯片的管脚 */
#define STM32F103ZE
/* 定义时钟源频率 */
#define RT_HSE_VALUE 8000000
/* 定义该宏开启 UART1 的使用 */
#define RT_USING_UART1复制错误复制成功Note
注:在实际应用中,系统配置文件 rtconfig.h 是由配置工具自动生成的,无需手动更改。
常见宏定义说明
RT-Thread 中经常使用一些宏定义,举例 Keil 编译环境下一些常见的宏定义:
1)rt_inline,定义如下,static 关键字的作用是令函数只能在当前的文件中使用;inline 表示内联,用 static 修饰后在调用函数时会建议编译器进行内联展开。
#define rt_inline static __inline复制错误复制成功2)RT_USED,定义如下,该宏的作用是向编译器说明这段代码有用,即使函数中没有调用也要保留编译。例如 RT-Thread 自动初始化功能使用了自定义的段,使用 RT_USED 会将自定义的代码段保留。
注意:RT-Thread 5.0 及更高的版本将
RT_USED关键字改成了rt_used,使用时注意修改。
#define RT_USED __attribute__((used))复制错误复制成功3)RT_UNUSED,定义如下,表示函数或变量可能不使用,这个属性可以避免编译器产生警告信息。
#define RT_UNUSED ((void)x)复制错误复制成功4)RT_WEAK,定义如下,常用于定义函数,编译器在链接函数时会优先链接没有该关键字前缀的函数,如果找不到则再链接由 weak 修饰的函数。
注意:RT-Thread 5.0 及更高的版本将
RT_WEAK关键字改成了rt_weak,使用时注意修改。
#define RT_WEAK __weak复制错误复制成功5)ALIGN(n),定义如下,作用是在给某对象分配地址空间时,将其存放的地址按照 n 字节对齐,这里 n 可取 2 的幂次方。字节对齐的作用不仅是便于 CPU 快速访问,同时合理的利用字节对齐可以有效地节省存储空间。
注意:RT-Thread 5.0 及更高的版本将
ALIGN关键字改成了rt_align,使用时注意修改。
#define ALIGN(n) __attribute__((aligned(n)))复制错误复制成功6)RT_ALIGN(size,align),定义如下,作用是将 size 提升为 align 定义的整数的倍数,例如,RT_ALIGN(13,4) 将返回 16。
#define RT_ALIGN(size, align) (((size) + (align) - 1) & ~((align) - 1))
















 853
853

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









