



让小编猜猜
一定有小伙伴和小编一样
喜欢在路上低头玩手机
然后一不小心
......

BANG~ 来源:bilibili
小编哭着跑回家
拜托哆啦A梦

然后...

哆啦A梦拿出了

太棒了~,小编正打算带着秘密道具引导天使出门玩耍
哆啦A梦说

欸嘿,等一等
你知道引导天使是如何保护你的吗?
你手里拿着的其实是~

激光雷达
激光雷达是传统雷达与激光技术相结合的产物,是以激光束作为信息载体,可以用相位、频率、偏振和振幅来搭载信息的主动式雷达。

激光雷达 来源:百度
由于激光具有高亮度性、高方向性、高单色性和高相干性特点,所以激光雷达能够精确测距、测速和跟踪,还具有很高角分辨率、速度分辨率和距离分辨率,对更小尺度的目标物也能产生回波信号,在探测细小颗粒有着特有优势。
原来是搭载了激光雷达呀,那它是如何工作的呢?

工作原理
三角测距
激光器发出一束激光,在遇到物体后,反射回探测器(CCD),激光器与探测器之间间隔了一段固定的距离。对于远近不同的物体,反射回的光线将会落在探测器不同的位置。通过反射光斑的位置与物体距离之间的三角函数关系,可以获得物体的位置信息。
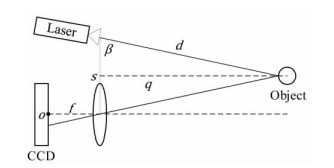
三角测距原理图 来源:参考资料1
根据原理图可知:基线长s,与发射器Laser光轴夹角为 β, 观测物Object与基线距离q,镜头与CCD芯片的焦距为 f,CCD中点为o,反射光轴在 CCD上投射点与o距离为x。根据三角形相似关系:

根据三角函数关系:
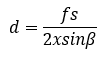
从而得到物体的距离d
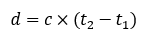
时间飞行法TOF
激光器在t1时刻发射一个激光脉冲,被物体反射后,在t2时刻被接收器接收。在一般情况下,空气里的光速基本不变,通过激光束飞行的时间t1-t2,以及光速c,可以得到物体的距离d:
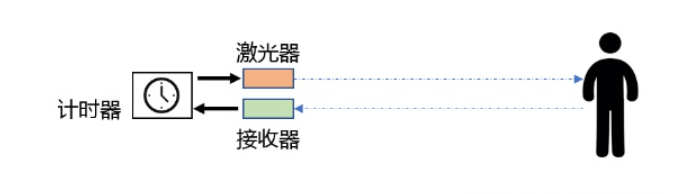
TOF原理图 来源:知乎
相干探测法
以调频连续波FMCW为例,激光器发射出具有一定带宽、频率线性变化的连续信号,通过发送与接收信号的差频来计算两个信号的时间差,最后由时间差得到对应的距离值。如果被探测物体在运动,则反射信号会有会有频率或波长变化,通过多普勒效应可得出被探测物体的速度。
相干探测原理图 来源:知乎
那么什么是多普勒效应呢?
当振动波源与观察者发生相对运动时,观察者实际接收到的频率相对于波源的实际频率f发生变化。
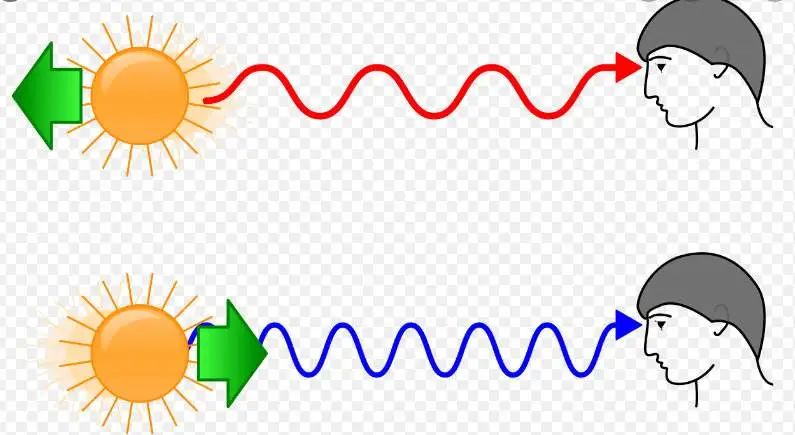
多普勒效应 来源:百度
物体接收到的实际频率f’为:
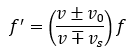
v为波在该介质中的行进速度;
v0为观察者相对于介质的移动速度,若接近发射源则前方运算符号为+号,反之则为−号;
vs为发射源相对于介质的移动速度,若接近观察者则前方运算符号为−号,反之则为+号。
若波源发射的是电磁波,则接收到的频率f’为:
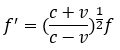
其中v为波源与接收器的相对速度。当波源与观察者接近时,v取正,称为“紫移”或“蓝移”;否则v取负,称为“红移”。
看着公式是不是一头雾水?这时候只需要把手机拿出来,播放一首音乐,然后快速的摇一摇,就能感受到由于多普勒效应而产生变化的音乐声啦!

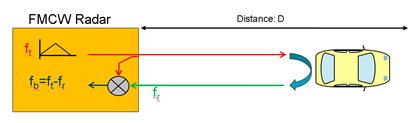
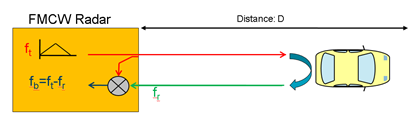
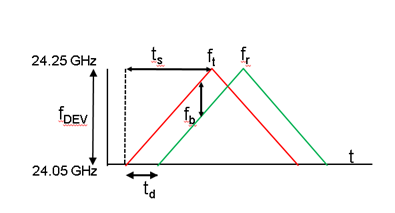
咳咳,回到正题。由下图看到,激光器发射一束连续信号ft
相干探测原理图 来源:知乎
当雷达(图中FMCW Rader)与物体(图中汽车)相对静止时,反射回探测器的信号fr在时间上延迟td

由图中几何关系可以得到(fb为差频)

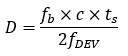
雷达与物体的距离为
探测静止物体时的激光信号 来源:参考资料6
当发射的连续信号为一确定波形时,可以通过差频信号fb来获取物体的位置信息。
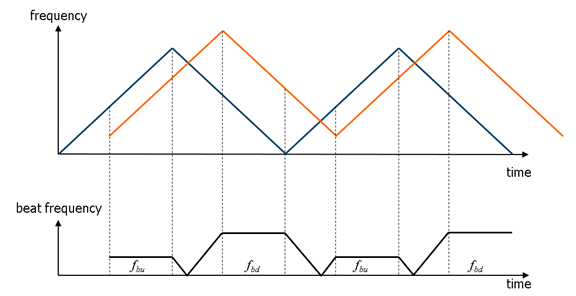
探测运动物体时的激光信号(上);拍频信号(下) 来源:参考资料6
当物体相对于雷达运动时,由于多普勒效应,反射回探测器的信号频率发生了变化,多普勒频移为(v<<c):

其中f0为发射信号中心频率
此时在信号上升沿和下降沿出现高低不同的两种差频:
雷达与物体间的距离为:
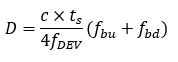
物体的速度为:
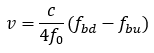
因此,可以通过高低两种拍频来计算距离与速度。

来源:bilibili
\ | /
★
可是,生活中使用的激光笔发射的光束都非常细,那么激光雷达要怎样探测不同方向的物体呢?引导天使好像不太可靠的样子~

激光雷达内置的扫描系统能够360度无死角保护你。

扫描方式
机械式旋转扫描
说到扫描,大家首先想到的一定是机械式扫描,只需要通过机械旋转带动发射部件进行扫描,即可探测到各个方位的物体。
机械式扫描 来源:参考资料3
这种方法扫描速度快、抗干扰能力强、可承受激光功率高。但机械结构的加入使得激光器变得又大又重,高速旋转下的部件非常容易磨损,需要周期性的维护。购买这种道具的话,我需要每2~3个月回一趟22世纪进行维护工作。

微机电系统MEMS
MEMS激光雷达是把机械结构集成到体积较小的硅基芯片上,通过微振镜改变单个发射器的发射角度,从而进行激光束偏转,将点光源扫射到有限区域内。此技术可以将振动折射部件集成到芯片上,减小了扫描部件的体积与重量,便于批量化生产,但其并没有做到完全取消机械结构。
振镜示意图 来源:参考资料5
这种技术的不足之处在于振镜的尺寸和材质对于激光功率有一定限制,而且扫描的水平视场角较小,无法做到360度全方位扫描,需要组合使用。
光学相控阵OPA
还记得之前让你在中科院物理研究所公众号上看的《为啥不能隔着门缝偷看?原来透过门缝就会看见“幽灵”》一文吗?当两束光相位差为0时发生相长干涉,此时振幅最大。
相长干涉
将同一束光经过分束器分为多路光信号,在各路光信号相位差为0情况下,向前传播的光束振幅最大,因而不会发生波束的偏转。
在各路光信号附加相位差之后(比如第二个波导与第一个波导的相位差为Δϕ,第三个波导与第一个波导的相位差为2Δϕ,以此类推),此时的等相位面不再垂直于波导方向,而是有了一定的偏转,满足等相位关系的波束会相干相长,不满足等相位条件的光束就会相互抵消,故光束的指向总是垂直于等相位面。
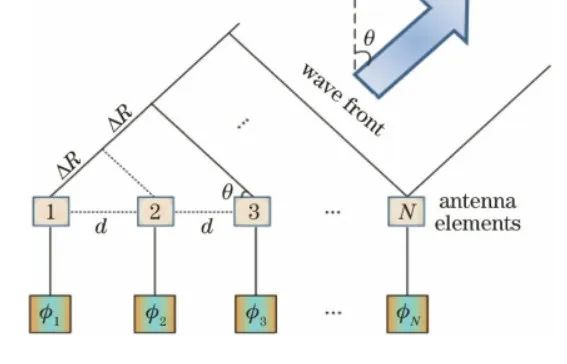
光学相控阵原理图 来源:知乎
如图所示,设相邻波导之间的间距都为d,则相邻波导输出的光束到达等相位面的光程差为
其中θ表示光束偏转角度,由于这个光程差是由阵元的相位差引起的,因而
所以在阵元中引入相位差完成了波束的偏转效果,这就是一维相控阵的扫描原理。
OPA扫描仿真图 来源:知乎
该种扫描方式彻底取消了机械结构,通过不同的相位,不同角度的光束能够对物体进行扫描,从而不需要采用物理扫描的方式。但也有其缺点,多束激光干涉容易形成旁瓣,影响光束作用距离和角分辨率,使得激光能量被分散,并且加工难度非常高:光学相控阵要求阵列单元尺寸小于半个波长。

闪光型Flash
以上激光雷达是逐点扫描式,单次发射只探测某个方位,而flash激光雷达单次探测可覆盖视角内所有方位,一次性实现全局成像来完成对环境周围环境的探测。
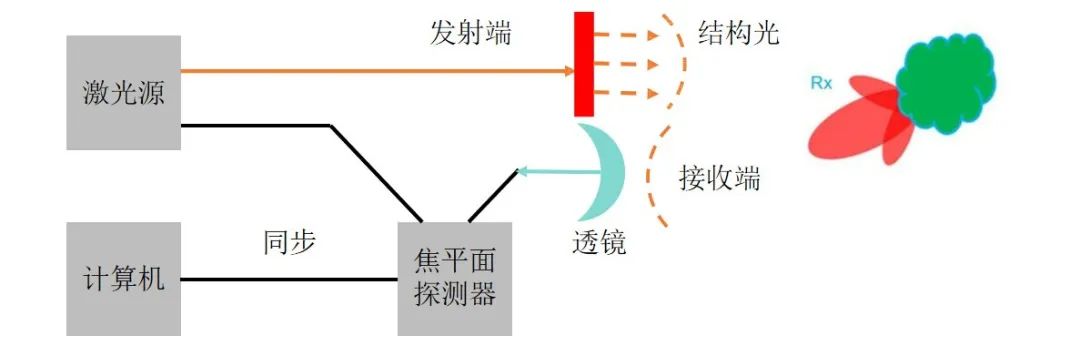
Flash原理图 来源:知乎
采用类似照相机的工作模式,每个像素点可以记录光子飞行时间信息。发射的面阵激光照射到目标上,由于物体具有三维空间属性,从而不同部位的光所反射的光具有不同的飞行时间,被焦平面探测器阵列探测,根据飞行时间不同绘制图像。
该种激光雷达无需扫描器件,成像速度快,集成度高,体积较小,适合量产;同时其探测距离较近,抗干扰能力差,角分辨率低。
\ | /
★
我说完了


啊~这个道具真是太方便了
托引导天使的福
今天在家真是安全!
参考资料:
[1] 李鑫慧, 郭蓬, 臧晨,等. 激光雷达技术研究现状及其应用[J]. 汽车电器, 2019(5):3.
[2] 激光雷达工作原理介绍 - 知乎 (zhihu.com)
[3] 激光雷达干货全面分析(一):最大优势,四大系统,八个指标 - 知乎 (zhihu.com)
[4] 多普勒效应 - 知乎 (zhihu.com)
[5] 一文彻底搞懂激光雷达原理!_自动驾驶之心的博客-优快云博客
[6] FMCW激光雷达_Lightigo的博客-优快云博客_fmcw雷达
编辑:荔枝果冻

我们是谁:
MatheMagician,中文“数学魔术师”,原指用数学设计魔术的魔术师和数学家。既取其用数学来变魔术的本义,也取像魔术一样玩数学的意思。文章内容涵盖互联网,计算机,统计,算法,NLP等前沿的数学及应用领域;也包括魔术思想,流程鉴赏等魔术内容;以及结合二者的数学魔术分享,还有一些思辨性的谈天说地的随笔。希望你能和我一起,既能感性思考又保持理性思维,享受人生乐趣。欢迎扫码关注和在文末或公众号留言与我交流!


扫描二维码
关注更多精彩
你真的分得清“前后左右”和“东西南北”吗?(四)——无处不在的相对方位
编码通信与魔术初步(七)——二进制编码经典魔术《街头猜数字》
点击阅读原文,往期精彩不错过!

















 360
360

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









