




参考代码:StreamPETR
1. 概述
介绍:在BEV感知中时序信息融合会为下游感知任务带来不小性能提升,但是在单帧基础上引入时序信息必然会带来额外开销,因而迫切需要一种高性能且代价小的融合方案。现有的一些时序融合策略多是在BEV特征空间维度上完成的,并且对于一些DETR-based方案本身就没有显式构建BEV特征,如PETR,则BEV特征空间上的时序融合方法就不适用了。对此,这里基于PETR中DETR-based方案提出了一种使用query实现多桢object-centric的时序融合策略,也就是不在BEV特征或者图像特征维度实现时序融合,只是在query针对目标去做融合。由于感知的目标是可能存在运动的,则需要建立起帧间运动关系,这里可以使用目标的运动信息(间隔时间、速度、相机内外参数等)构建目标的运动感知模块(MLN,motion-aware layer normalization),这样就可以为场景中的运动目标进行处理。
之前工作中对于BEV特征融合的策略可以为下图中的左边两幅图:
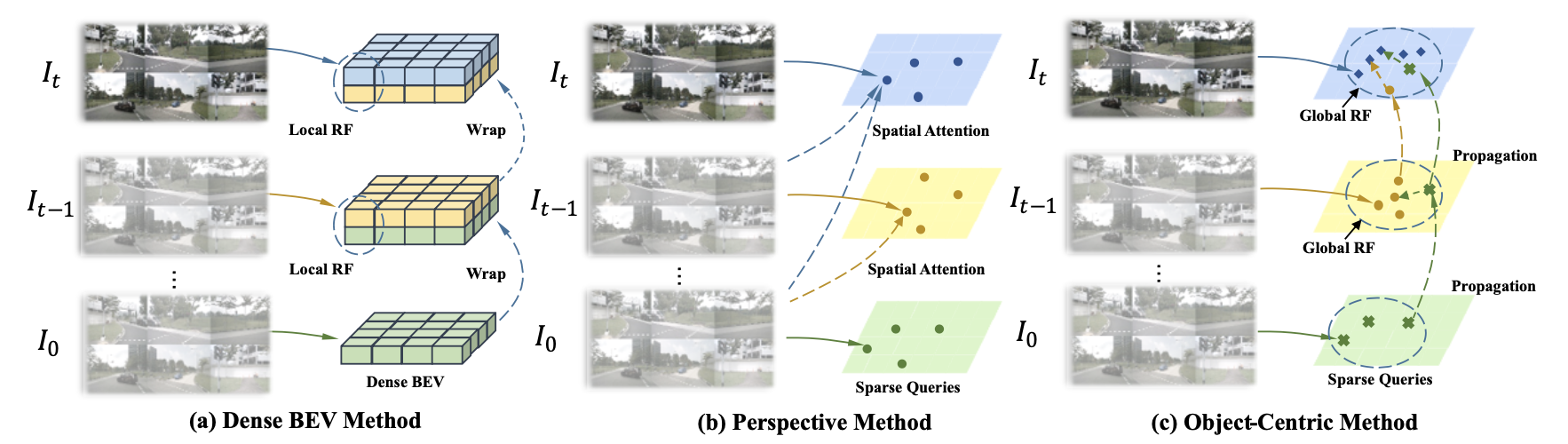
直接特征图上的时序关联:
这种类型的时序建模是直接操作于BEV空间上,如对不同时刻BEV特征在经过帧间pose对齐之后,通过一个网络直接融合,典型方法如BEVFusion:
F
ˉ
b
e
v
t
=
φ
(
F
b
e
v
t
−
1
,
F
b
e
v
t
)
\bar{F}_{bev}^t=\varphi(F_{bev}^{t-1},F_{bev}^t)
Fˉbevt=φ(Fbevt−1,Fbevt)
只用前面一帧的信息太少了,可以多利用之前帧的信息,典型方法是SOLOFusion:
F
ˉ
b
e
v
t
=
φ
(
F
b
e
v
t
−
k
,
…
,
F
b
e
v
t
−
1
,
F
b
e
v
t
)
\bar{F}_{bev}^t=\varphi(F_{bev}^{t-k},\dots,F_{bev}^{t-1},F_{bev}^t)
Fˉbevt=φ(Fbevt−k,…,Fbevt−1,Fbevt)
时序特征有自然的序列属性,那么可使用类RNN的方法去处理这类数据:
F
ˉ
b
e
v
t
=
φ
(
F
ˉ
b
e
v
t
−
1
,
F
b
e
v
t
)
\bar{F}_{bev}^t=\varphi(\bar{F}_{bev}^{t-1},F_{bev}^t)
Fˉbevt=φ(Fˉbevt−1,Fbevt)
2D图像特征上做时序融合:
这类方法关注的不再是BEV特征而是任务的query,构建目标query直接在不同帧的2D图像上做cross-attention来获取query特征表达,如PETR(计算量真的受不了):
F
ˉ
o
b
j
t
=
φ
(
F
2
d
t
−
k
,
F
o
b
j
t
)
+
⋯
+
φ
(
F
2
d
t
,
F
o
b
j
t
)
\bar{F}_{obj}^t=\varphi(F_{2d}^{t-k},F_{obj}^t)+\dots+\varphi(F_{2d}^{t},F_{obj}^t)
Fˉobjt=φ(F2dt−k,Fobjt)+⋯+φ(F2dt,Fobjt)
object-centric层次的特征时序融合:
为了弥补使用2D特征做cross-attention带来的巨大计算开销,文章提出在obj-wise上做时序融合,但由于场景目标是存在运动的,则这里就需要运动信息
M
M
M(包含时间戳、时间间隔、估计的速度等)对之前帧的目标进行补偿:
F
ˉ
o
b
j
t
−
1
=
μ
(
F
o
b
j
t
−
1
,
M
)
\bar{F}_{obj}^{t-1}=\mu(F_{obj}^{t-1},M)
Fˉobjt−1=μ(Fobjt−1,M)
完成目标补偿之后便可以与当前帧query做融合:
F
ˉ
o
b
j
t
=
φ
(
F
ˉ
o
b
j
t
−
1
,
F
o
b
j
t
)
\bar{F}_{obj}^t=\varphi(\bar{F}_{obj}^{t-1},F_{obj}^t)
Fˉobjt=φ(Fˉobjt−1,Fobjt)
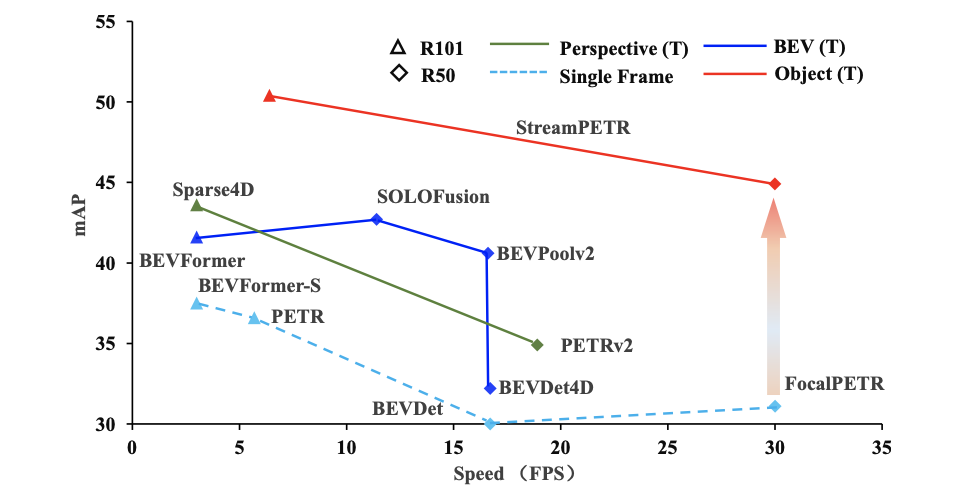
则将文章的方法与之前的一些方法进行比较,可以看到有很明显优势,而且实现更加简洁:
2. 方法实现
1. 整体流程:
文章算法的整体框图见下图所示:
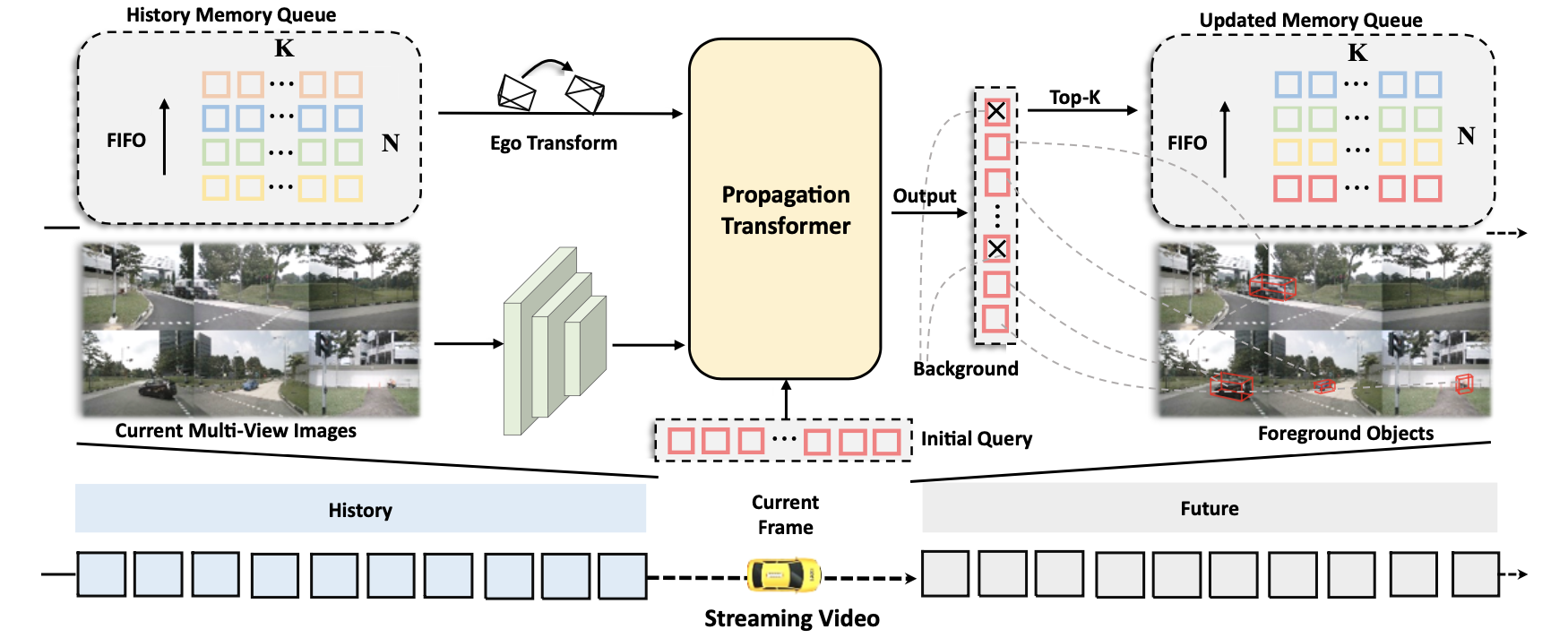
文中将多帧融合表示为目标的query在不同时刻补偿对齐之后融合的策略,这样可以极大减少网络计算量。大致过程如下:
- 1)如上图中之前帧的目标query会经过top-k选择之后送入维度为 N ∗ K N*K N∗K的FIFO对队列,其中 N N N为历史帧数, K K K为目标的数量。
- 2)同时还引入帧间时间间隔、帧间pose、目标速度作为补偿因子,这部分通过MLN实现,这样便可以得到从历史帧中对齐的query。
- 3)对齐之后的历史帧query和当前帧query一同输入到后续解码中得到感知结果,对于重复的目标是通过hybird attention layer实现的。
2. 特征抽取:
图像的特征会经过CNN backbone和FPN网络完成特征抽取,同时借鉴Focal-DETR在2D特征维度引入FCOS检测头,这样就可以从2D图像中去获取真正的前景信息,
# projects/mmdet3d_plugin/models/dense_heads/focal_head.py#L180
sample_weight = cls_score.detach().sigmoid() * centerness.detach().view(bs,-1,1).sigmoid()
_, topk_indexes = torch.topk(sample_weight, num_sample_tokens, dim=1)
正如上面代码,其是抽取的top-k的index作为后续BEV感知所需图像特征的输入。同时对2D层面也用了MLN实现不同帧的对齐。但是这里需要注意:需要分析2D检测部分出现问题之后对下游性能影响?只使用index确定的位置特征参与后续BEV感知,稳定性和不同任务适配能力如何?
3. 当前帧query的构建:
借鉴DN-DETR中使用GT添加noise方式构建query,之后做去噪任务。以此提升网络的收敛性和性能表现(参考denoise-detr)。
用以上方式构建好当前帧的query之后,在后续的transformer decoder layer中会对其中的self-attention做修改,也就是将其中的key和val再concat上之前的query(对应的query pos也会做同样的操作)。
4. 输入历史帧数据:
在输入历史数据之前,会使用历史帧中积累的pose和当前帧的pose做reference point的对齐操作,这样实现在同一时刻的ego下计算,这部分参考:
# projects/mmdet3d_plugin/models/dense_heads/streampetr_head.py#L319
def pre_update_memory(self, data):
...
历史帧的数据主要包含了:query、query_pos、reference_point、ego_motion、timestamp等信息,这些信息都是存放在一个FIFO队列中,每次从划分新老数据之后与当前帧组合得到当前帧表达和历史帧表达。这部分可以参考:
# projects/mmdet3d_plugin/models/dense_heads/streampetr_head.py#L420
def temporal_alignment(self, query_pos, tgt, reference_points):
...
完成对于不同帧query的对齐之后,会将pose、time、velocity这些变量作为相对变化量使用MLN实现对历史query和query_pos的增强。然后就是transformer解码的过程了,具体MLN的结构可以参见下图右图。
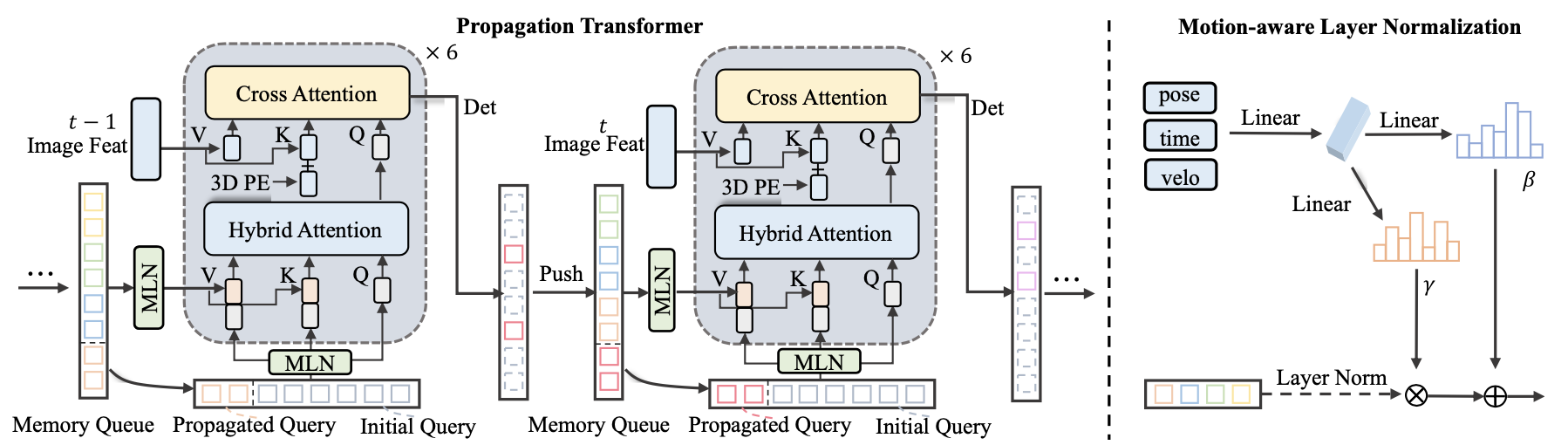
对齐之后的query会与当前帧的query送入到hybrid attention layer做query内部的self-attention操作,从而实现query去重的任务。对于这些query在hybird中如何输入的,可以参考上图中左图下半部分的细节,图已经呈现很明确了。
5. 历史帧数据更新:
参考FIFO队列的更新机制,采用先进先出的机制更新历史数据,这部分可以参考:
# projects/mmdet3d_plugin/models/dense_heads/streampetr_head.py#L420
def post_update_memory(self, data, rec_ego_pose, all_cls_scores, all_bbox_preds, outs_dec, mask_dict):
...
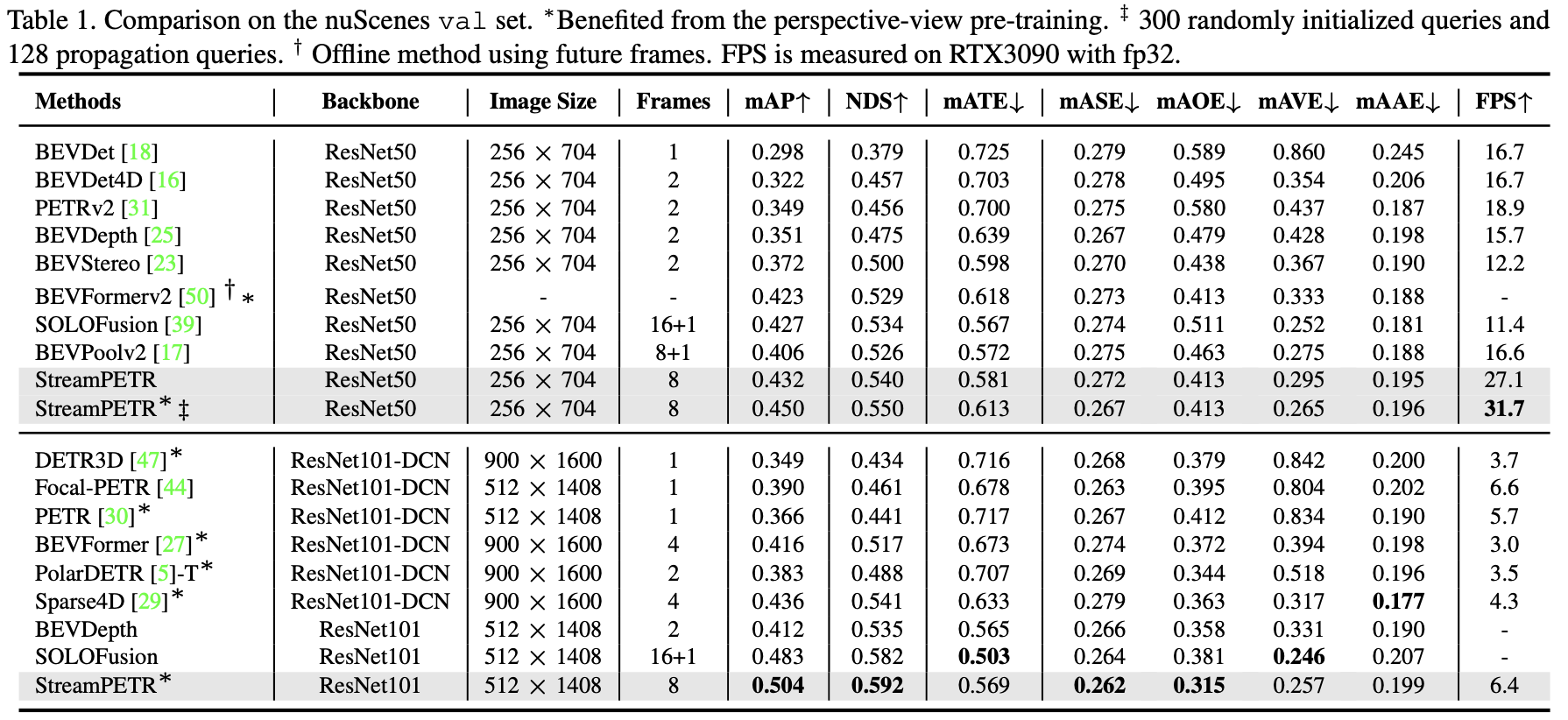
3. 实验结果
在nuScenes val数据集下的性能比较:
那么上面提到的pose、time、velocity对于对齐的效果影响,pose才是影响因子的大头:


















 502
502

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









