




 本文深入探讨了一篇关于如何在无需额外标注的情况下,利用深度学习估计动态场景中的深度和物体运动的论文。通过对刚性物体运动的特性分析,提出了一种隐式约束方法,减少了运动物体对深度估计的影响。网络结构基于深度估计和相机位姿估计,通过深度图平滑、循环一致性、图像域循环一致性和物体移动约束等损失函数优化。实验结果显示,这种方法在Cityscapes和KITTI数据集上表现出色。
本文深入探讨了一篇关于如何在无需额外标注的情况下,利用深度学习估计动态场景中的深度和物体运动的论文。通过对刚性物体运动的特性分析,提出了一种隐式约束方法,减少了运动物体对深度估计的影响。网络结构基于深度估计和相机位姿估计,通过深度图平滑、循环一致性、图像域循环一致性和物体移动约束等损失函数优化。实验结果显示,这种方法在Cityscapes和KITTI数据集上表现出色。
参考代码:depth_and_motion_learning
1. 概述
导读:这篇文章是在(Depth from Videos in the Wild)的基础上进行改进得到的,在之前的文章中运动区域/物体通过mask标注或是bounding box标注的形式确定,但是这样或多或少会存在对外依赖的问题。对此,文章从 刚性物体运动 在相机前运动的特性进行分析得出如下两个特性:
1)其在整幅图像中的占比是较少的,毕竟一般情况下不会运动的背景占据了较大的比例;
2)刚性运动的物体其内部运动特性是分段的常量值,也就是对应的梯度变化很小;
正是基于上述两点观察,文章在之前文章的基础上对运动物体区域构建了一个约束,从而减少了运动物体会深度估计带来的影响。
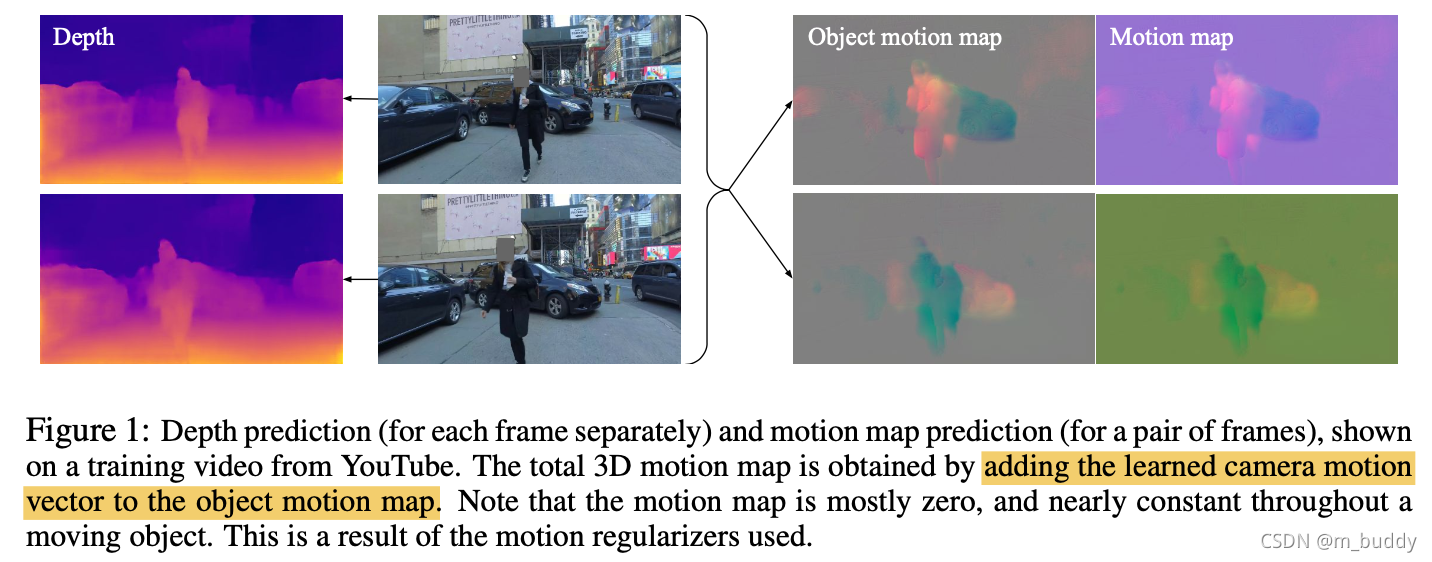
文章的方式是通过隐式约束的形式对刚性物体运动区域进行约束,从而避免了显示地对运动区域标注,因而文章的方法可以在输入2帧图像的情况下实现深度预测和物体运动感知,如下图所示:
2. 方法设计
2.1 网络结构
文章的网络结构如下图所示:
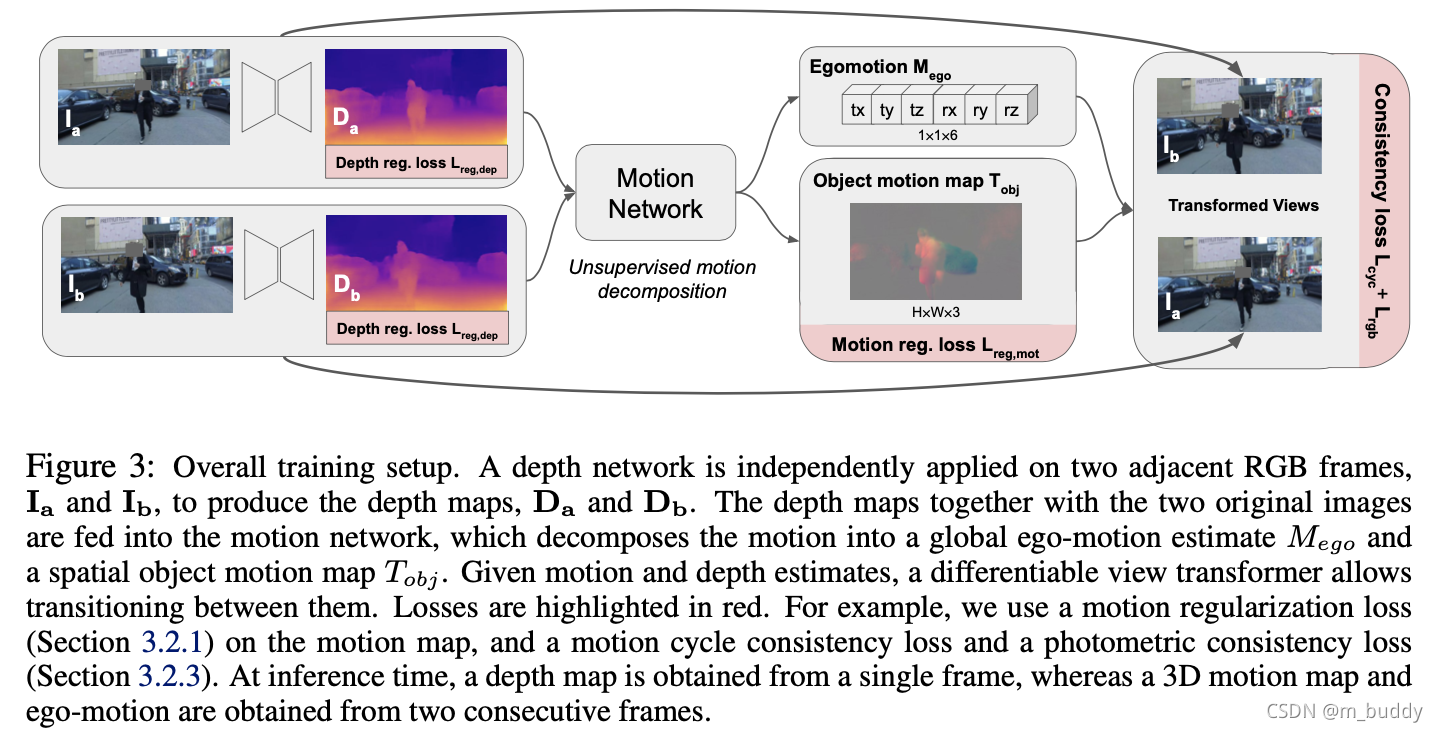
整体上这里网络结构与之前文章(Depth from Videos in the Wild)的网络结构类似,只是在一些细节上有所区别。这里深度估计网络的编解码结构是一致的,主要的不同点在相机位姿和内参估计网络上,在原本两帧图像输入基础上添加了深度估计结果作为输入。
2.2 损失函数
深度图平滑损失:
这部分损失是为了给深度估计结果带来平滑作用,减少噪声的产生,其损失函数描述为:
L
r
e
g
,
d
e
p
=
α
d
e
p
∬
(
∣
∂
u
d
(
u
,
v
)
e
−
∂
u
I
(
u
,
v
)
+
∂
v
d
(
u
,
v
)
e
−
∂
v
I
(
u
,
v
)
∣
d
u
d
v
L_{reg,dep}=\alpha_{dep}\iint(|\partial_ud(u,v)e^{-\partial_uI(u,v)}+\partial_vd(u,v)e^{-\partial_vI(u,v)}|d_ud_v
Lreg,dep=αdep∬(∣∂ud(u,v)e−∂uI(u,v)+∂vd(u,v)e−∂vI(u,v)∣dudv
循环一致性损失:
首先是变换矩阵的循环一致性约束,其描述为:
L
c
y
c
=
α
c
y
c
∣
∣
R
R
i
n
v
−
1
∣
∣
2
∣
∣
R
−
1
∣
∣
2
+
∣
∣
R
i
n
v
−
1
∣
∣
2
+
β
c
y
c
∬
∣
∣
R
i
n
v
T
(
u
,
v
)
+
T
i
n
v
(
u
w
a
r
p
,
v
w
a
r
p
)
∣
∣
2
∣
∣
T
(
u
,
v
)
∣
∣
2
+
∣
∣
T
i
n
v
(
u
w
a
r
p
,
v
w
a
r
p
)
∣
∣
2
d
u
d
v
L_{cyc}=\alpha_{cyc}\frac{||RR_{inv}-\mathbf{1}||^2}{||R-\mathbf{1}||^2+||R_{inv}-\mathbf{1}||^2}+\beta_{cyc}\iint\frac{||R_{inv}T(u,v)+T_{inv}(u_{warp},v_{warp})||^2}{||T(u,v)||^2+||T_{inv}(u_{warp},v_{warp})||^2}d_ud_v
Lcyc=αcyc∣∣R−1∣∣2+∣∣Rinv−1∣∣2∣∣RRinv−1∣∣2+βcyc∬∣∣T(u,v)∣∣2+∣∣Tinv(uwarp,vwarp)∣∣2∣∣RinvT(u,v)+Tinv(uwarp,vwarp)∣∣2dudv
图像域的循环一致性约束,描述为:
L
r
g
b
=
α
r
g
b
∬
∣
I
(
u
,
v
)
−
I
w
a
r
p
(
u
,
v
)
∣
1
D
u
,
v
>
D
w
a
r
p
(
u
,
v
)
d
u
d
v
+
β
r
g
b
1
−
S
S
I
M
(
I
,
I
w
a
r
p
)
2
L_{rgb}=\alpha_{rgb}\iint|I(u,v)-I_{warp}(u,v)|\mathbf{1}_{D_{u,v}\gt D_{warp}(u,v)}d_ud_v+\beta_{rgb}\frac{1-\mathcal{SSIM(I,I_{warp})}}{2}
Lrgb=αrgb∬∣I(u,v)−Iwarp(u,v)∣1Du,v>Dwarp(u,v)dudv+βrgb21−SSIM(I,Iwarp)
物体移动约束损失:
这部分损失主要是完成下面的两个作用:
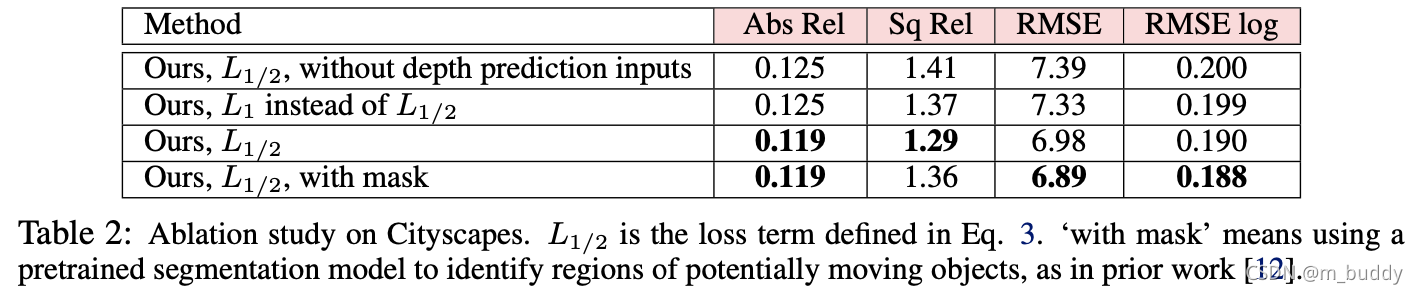
- 1)根据上文提到的稀疏特性,对运动场做稀疏化约束,这里使用的 L 1 2 L{\frac{1}{2}} L21,文章指出该函数具有更好的稀疏特性;
- 2)基于刚性物体运动的分析,对刚性物体运动场施加梯度损失,使其在分布呈现分段的常量值特性;
首先对于常量值特性,添加梯度约束:
L
g
1
[
T
(
u
,
v
)
]
=
∑
i
∈
{
x
,
y
,
z
}
∬
(
∂
u
T
i
(
u
,
v
)
)
2
+
(
∂
v
T
i
(
u
,
v
)
)
2
d
u
d
v
L_{g1}[T(u,v)]=\sum_{i\in \{x,y,z\}}\iint \sqrt{(\partial_uT_i(u,v))^2+(\partial_vT_i(u,v))^2}d_ud_v
Lg1[T(u,v)]=i∈{x,y,z}∑∬(∂uTi(u,v))2+(∂vTi(u,v))2dudv
接下来对稀疏化添加约束:
L
1
2
[
T
(
u
,
v
)
]
=
2
∑
i
∈
{
x
,
y
,
z
}
⟨
∣
T
i
∣
⟩
∬
(
1
+
∣
T
i
(
u
,
v
)
∣
⟨
∣
T
i
∣
⟩
d
u
d
v
L_{\frac{1}{2}}[T(u,v)]=2\sum_{i\in \{x,y,z\}}\langle|T_i|\rangle\iint \sqrt{(1+\frac{|T_i(u,v)|}{\langle|T_i|\rangle}}d_ud_v
L21[T(u,v)]=2i∈{x,y,z}∑⟨∣Ti∣⟩∬(1+⟨∣Ti∣⟩∣Ti(u,v)∣dudv
则这部分整体的损失函数描述为:
L
r
e
g
,
m
o
t
α
m
o
t
L
g
1
[
T
o
b
j
(
u
,
v
)
]
+
β
m
o
t
L
1
2
[
T
o
b
j
(
u
,
v
)
]
L_{reg,mot}\alpha_{mot}L_{g1}[T_{obj}(u,v)]+\beta_{mot}L_{\frac{1}{2}}[T_{obj}(u,v)]
Lreg,motαmotLg1[Tobj(u,v)]+βmotL21[Tobj(u,v)]
则对应的损失函数实现可以参考:
# losses/loss_aggregator.py#L283
normalized_trans = regularizers.normalize_motion_map(
residual_translation, translation)
self._losses['motion_smoothing'] += scale_w * regularizers.l1smoothness( # 对应公式2,分段常量值约束
normalized_trans, self._weights.motion_drift == 0)
self._losses['motion_drift'] += scale_w * regularizers.sqrt_sparsity( # 对应公式3,稀疏性约束
normalized_trans)
上面提到的几点约束的消融实验结果:
3. 实验结果
Cityscapes数据集上性能对比:

KITTI数据集上性能对比:


















 1193
1193

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









