



可扩展的骨科导丝导航模拟平台
引言
近二十年来,骨科基于模拟的外科技能培训需求稳步增长。这一需求受到多种因素的推动。2003年,实施了住院医师工作时间限制,为员工和患者创造了更安全的工作环境,但也可能限制了住院医师在培训期间获得的手术经验量[1]。2013年7月,负责认证骨科外科医生执业能力的美国骨科手术委员会要求住院医师培训项目投入时间和场地,对第一年住院医师进行“用于伤员初期处理的技能以及基本手术技能”的训练,以使其能够参与外科手术程序[2]。一些国家甚至已经开始向基于能力的培训项目过渡,当住院医师在各种模拟任务中展示出足够的手术技能时,便可进入下一阶段[3]。
随着骨科模拟技术的日益普及,用于培训外科医生的工具数量稳步增加。然而,目前大多数项目可用的模拟器主要集中在较窄的范围内,尤其是关节镜手术相关的内容[4–6]。其中一项难以以安全且经济的方式对住院医师进行培训的任务是导线导航,这是一种在多种外科手术程序中使用的骨科手术技能。该技能使外科医生能够在骨骼中沿指定路径钻入一根手术导丝,通常为长而小直径的钢针,并通过术中二维透视图像进行观察。导线导航需要复杂的视觉空间认知能力,因为外科医生必须对患者的解剖结构进行可视化和导航。在某些情况下,放置导丝是最终任务;而在其他情况下,导丝则作为后续植入空心植入物的引导。无论何种情况,在骨骼中放置导丝的位置都会直接影响患者的手术结果。为了突出此项技能在骨科领域的重要性,美国骨科手术委员会已将导线导航列为一项核心胜任技能[7]。
我们团队此前提出了一种专门用于髋部导线导航的导线导航手术模拟器的设计[8]。选择髋部导线导航作为初始应用,是因为美国每年发生大量髋部骨折病例[9]。然而,许多其他外科手术程序,包括一些骨科以外的手术,也依赖于导线导航。由于外科医生面临的可视化挑战在很大程度上是任务特定的,因此针对这些手术中的许多都需要专用的模拟器进行训练。相反,我们对现有模拟器进行了改进,以适应新的外科手术程序,同时仍可锻炼导线导航这一基础技能。本文将探讨开发新模拟器应用所采用的标准,介绍开发新应用的一个示例,并展示骨科住院医师使用新应用进行训练的相关数据。
方法
模拟平台
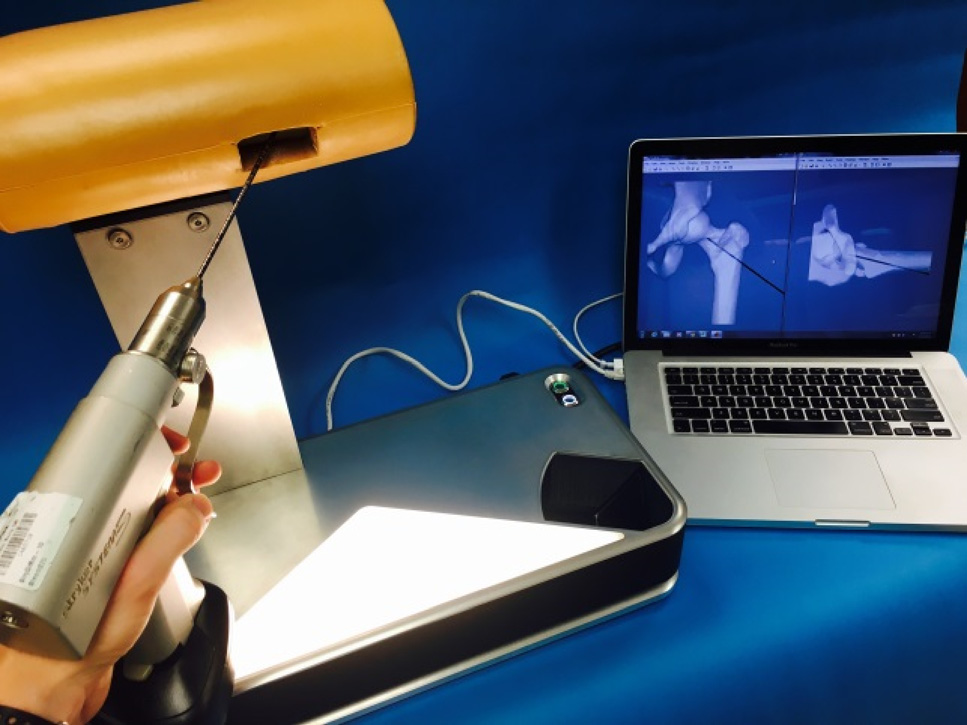
导丝导航模拟器是一种光学系统,利用图像处理算法追踪手术器械(在此为导丝)相对于固定人工骨骼的位置(图1)。立体相机系统将图像对传输至连接的笔记本电脑中的存储库。当住院医师请求获取透视图像时,系统会从存储库中调取最新的图像对并进行处理。由于摄像头在空间中位置固定,因此可以从任意立体图像对中计算出导丝在三维空间中的轨迹。导丝周围刻有的平行线图案可使算法估算导丝的轴向位置。基于导丝轨迹向量和轴向位置这两个信息,可生成模拟的透视图像。模拟器上安装的人工骨骼被泡沫外壳包裹,从而遮挡了骨骼的几何结构,迫使受训者在进行导丝导航时主要依赖模拟的透视图像,正如在手术室中的实际情况一样。住院医师使用与在手术室中为真实患者操作时相同的钻头将钢针植入人工骨骼中。
开发新应用的标准
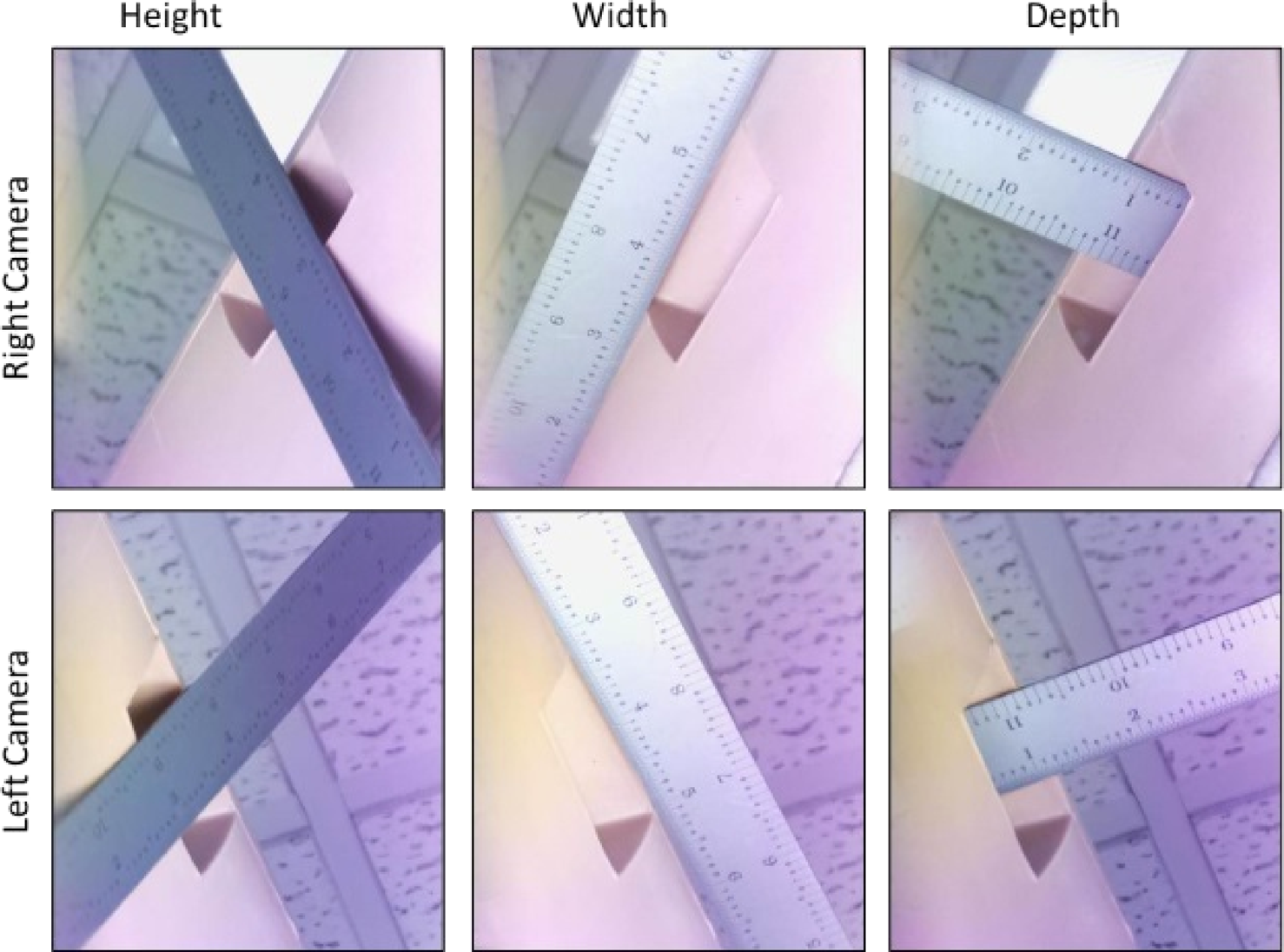
扩展模拟器平台以模拟其他外科手术程序涉及将模拟器的光学系统功能与特定应用的需求进行比较。导丝或其他手术器械必须在两个摄像头视图中均可见并聚焦。重叠的聚焦区域称为工作体积。目前,该模拟器的工作体积为截锥形,从人工骨骼表面的入口位置向外扩展。该平截头体在软组织包膜表面处的宽度约为102毫米(4英寸),深度约为76毫米(3英寸),高度约为102毫米(4英寸)(图2)。
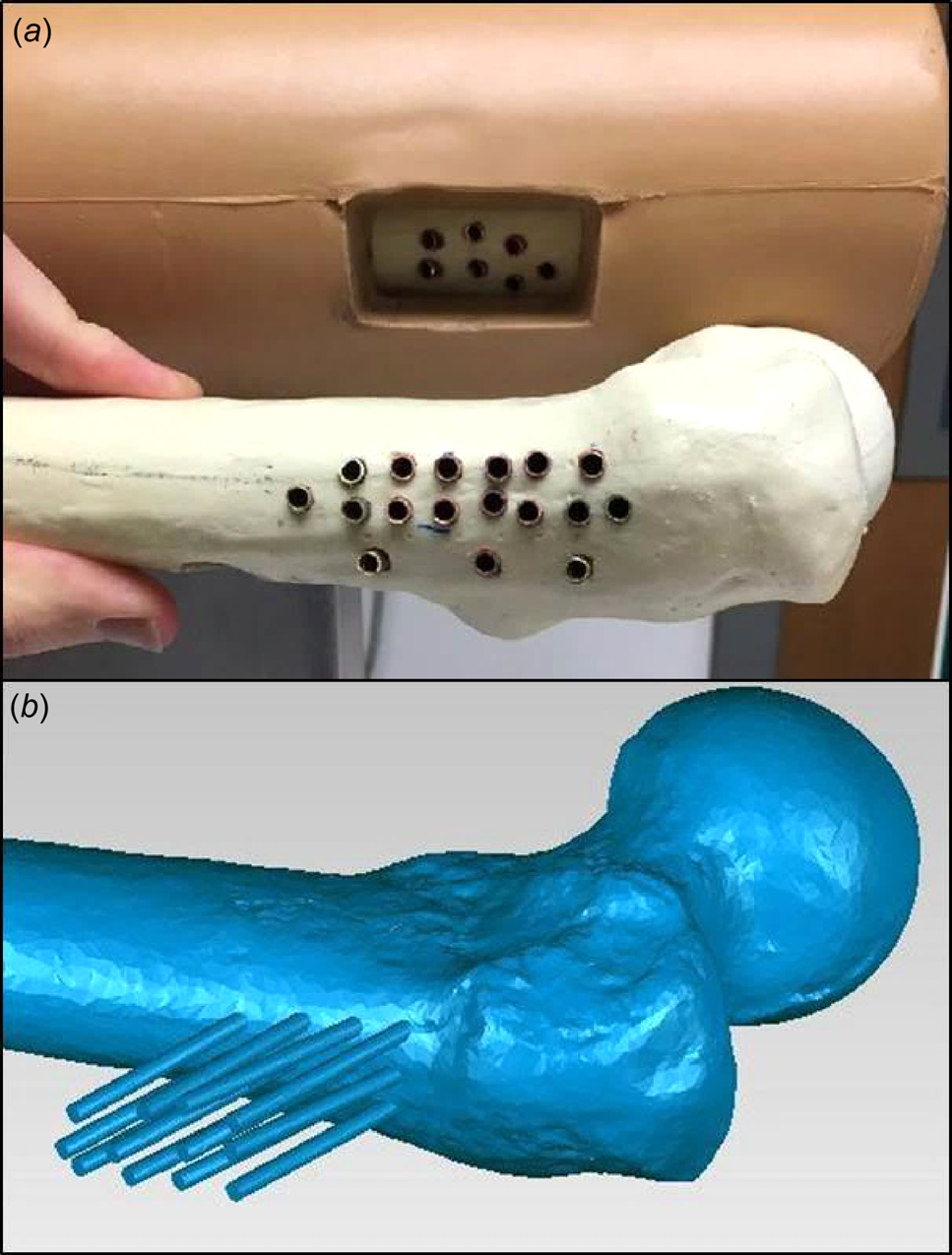
第二个光学系统特性是导丝跟踪的精度。某些手术可能比其他手术需要更高的跟踪精度。例如,由于儿童肘部与成人髋部在尺寸上存在显著差异,在儿童肘部放置手术钢丝所需的精度高于在成人髋部放置。此外,经验更丰富的外科医生可能对微小的位置调整更为敏感;因此,不同类型的用户可能需要不同的性能水平。为了量化模拟器的精度,我们将已知导丝位置与光学系统计算出的位置进行比较。参考导丝位置由两个目标骨上的预钻孔定义。这些孔的位置设置使得插入孔中的导丝轨迹覆盖模拟器的工作体积。每个孔中均放置了内径与测试导丝外径相匹配的铜管衬套,以确保多次导丝插入不会改变孔尺寸。铜管底部用金属堵头封住,以确保可重复导丝插入深度(图3)。
使用FaroArm激光扫描仪(法如科技公司,佛罗里达州莱克玛丽)对安装在模拟器上的骨骼进行了激光扫描。这确定了每根导丝相对于模拟器框架的三维位置(图3)。FaroArm的扫描精度为0.024毫米(0.00094英寸)[10]。将一根已知长度的短导丝插入每个带衬套的孔中,并分别进行扫描,以创建每个预制孔的参考轨迹和尖端位置数据集。然后将这29个参考位置与光学系统计算出的相应导丝轨迹和轴向位置进行比较。每个参考位置采集十次光学测量数据。由于该系统对背景光和图像噪声敏感,测试在理想的实验室环境下进行,同时也在另外四个代表标准操作典型情况的地点进行。
在将系统扩展到其他导丝导航应用时,需要评估的第三个考虑因素是:当钻头钻入骨骼外层的高密度皮质组织与骨内部的松质软组织时,用户所感受到的触觉反馈。通常情况下,检测从皮质组织到松质组织的过渡进入松质骨钻孔是外科手术任务中的一个重要环节。例如,外科医生通常利用这一过渡作为提示,判断导丝已穿过骨骼并到达对侧的皮质骨壁。
首个新的导丝导航应用是在与一组骨科医生协商后选定的。我们共同制定了一份潜在的导丝导航手术清单,包括骶髂螺钉固定、桡骨远端骨折固定、儿童肘部骨折固定、脊柱融合术中椎弓根螺钉置入、肱骨近端骨折固定以及胫骨平台骨折固定。最终选择了骶髂螺钉固定手术,因为其规模与髋部导丝手术相似(但对受训者精度要求更高),它引入了不与地面正交的影像投射(需要更深入的几何理解),而且我们认为住院医师会对尝试这种具有挑战性但相对罕见的手术感到兴奋[11]。此外,目前尚无被广泛采用的针对该任务的住院医师培训模型。奥兰多区域医疗中心的一个团队曾发表过使用Sawbones骨盆模型结合C型臂(生成透视图像的设备)来培训住院医师的方法[12]。然而,C型臂的获取可能受限且成本高昂,更不用说辐射暴露会给训练带来安全隐患。目前其他用于此任务的住院医师培训选择还包括尸体训练,这种方式通常非常昂贵,并且同样需要使用C型臂并导致辐射暴露[13]。
骶髂螺钉固定
骶髂螺钉固定的手术技术是一种微创手术,涉及将导丝垂直置于骶髂关节并穿过骶骨体中线[14]。使该手术具有挑战性的因素包括:首先,用于正确放置植入物的通道可能非常狭窄。该通道周围有多条脆弱的神经根和脊髓。据报道,植入物放置不当的发生率在18%至24%之间[15–18]。此外,患者之间的骨盆解剖结构差异很大,要求外科医生根据每位患者的情况调整植入路径,甚至导致部分患者无法接受该手术。
文献检索揭示了外科医生通常遇到的解剖变异范围内理想植入物位置的参数。一项研究分析了一组骨盆扫描,以相对于解剖变异定义理想路径和可接受的通道参数[19]。该分析将工作体积定义为穿过骶骨体且不与神经根相交的圆柱形通道。分析表明,在多种骨盆解剖结构中,该通道的平均直径为14 mm(0.55 in.),平均长度为150 mm(5.91 in.)[19]。
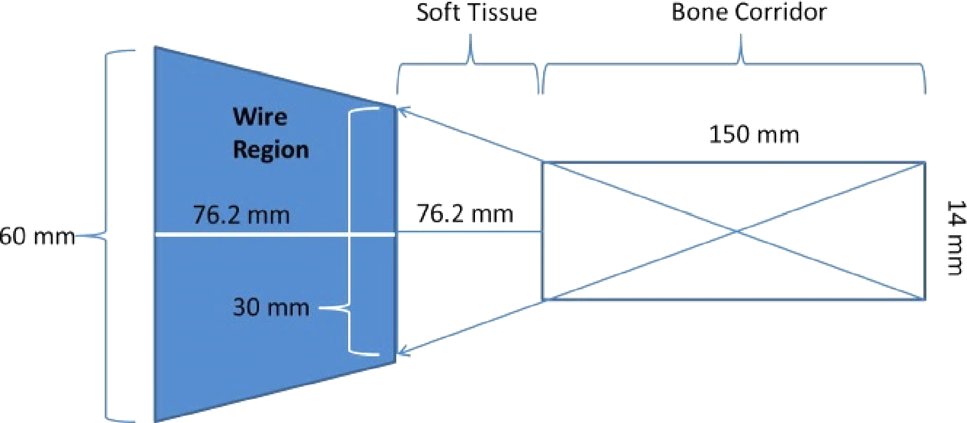
该通道定义了导丝在骨骼内的位置,但外科医生还必须经皮引导导丝穿过周围的软组织。因此,为了完整定义该手术的工作体积,还必须考虑导丝穿过软组织到达骨表面的路径。在我们的实现中,设计了一个软组织包膜,其骨表面与摄像头可见导丝区域之间约有76毫米(3英寸)的材料间隔。导丝到达骨骼内该通道所占据的空间由此形成一个平截头体,前端宽度为30毫米(1.18英寸),深度为76.2毫米(3英寸),后端宽度约为60毫米(2.36英寸)(图4)。该工作体积使系统能够准确跟踪通过骶骨体安全通道内的任何导丝。
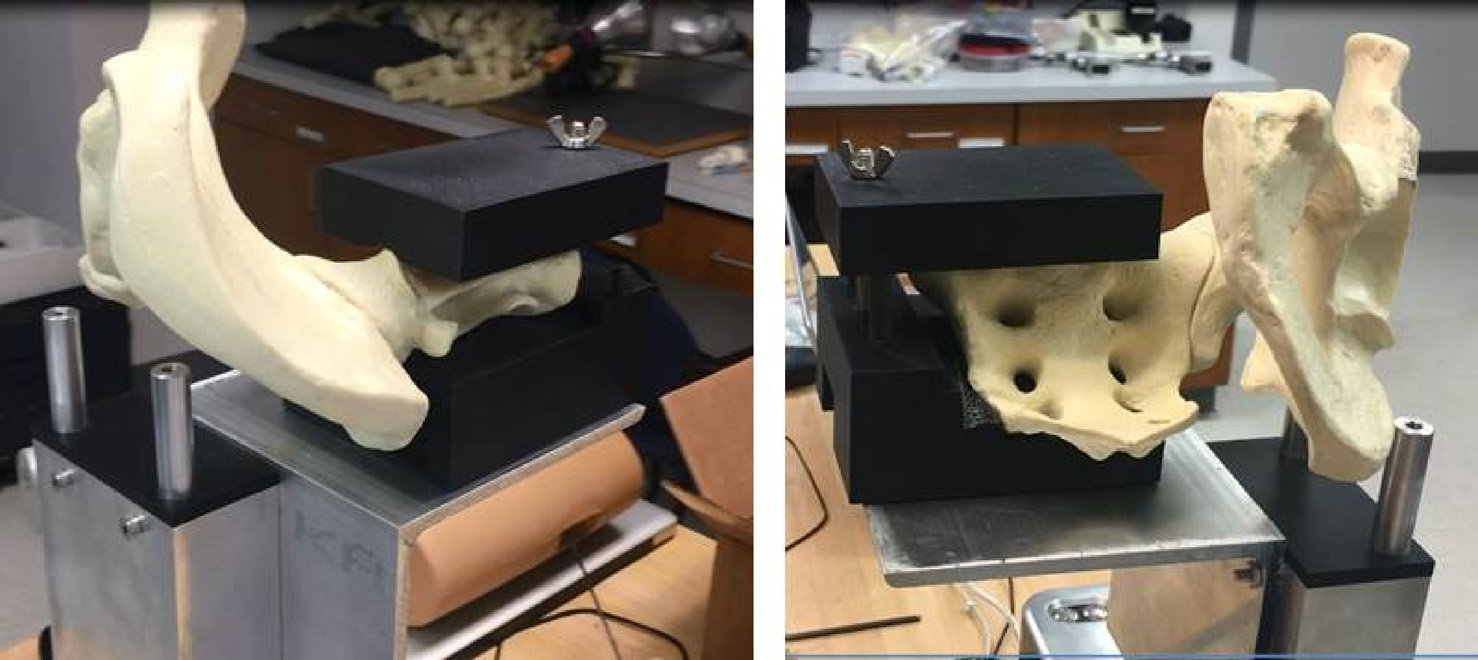
设计了一种安装支架,用于固定人工半骨盆(Sawbones,型号#1294-29),使骶髂螺钉手术所需的工作体积与模拟器的光学系统的工作体积相交。该安装支架由三个主要部件组成:一个L型支架,用于提供平坦且刚性的安装表面;一个与骶骨体解剖结构底面匹配的3D打印外壳;以及一个与骶骨体解剖结构顶面匹配的3D打印外壳(图5)。两个特别设计的表面可重复地定位半骨盆,并将其夹紧在模拟器上。
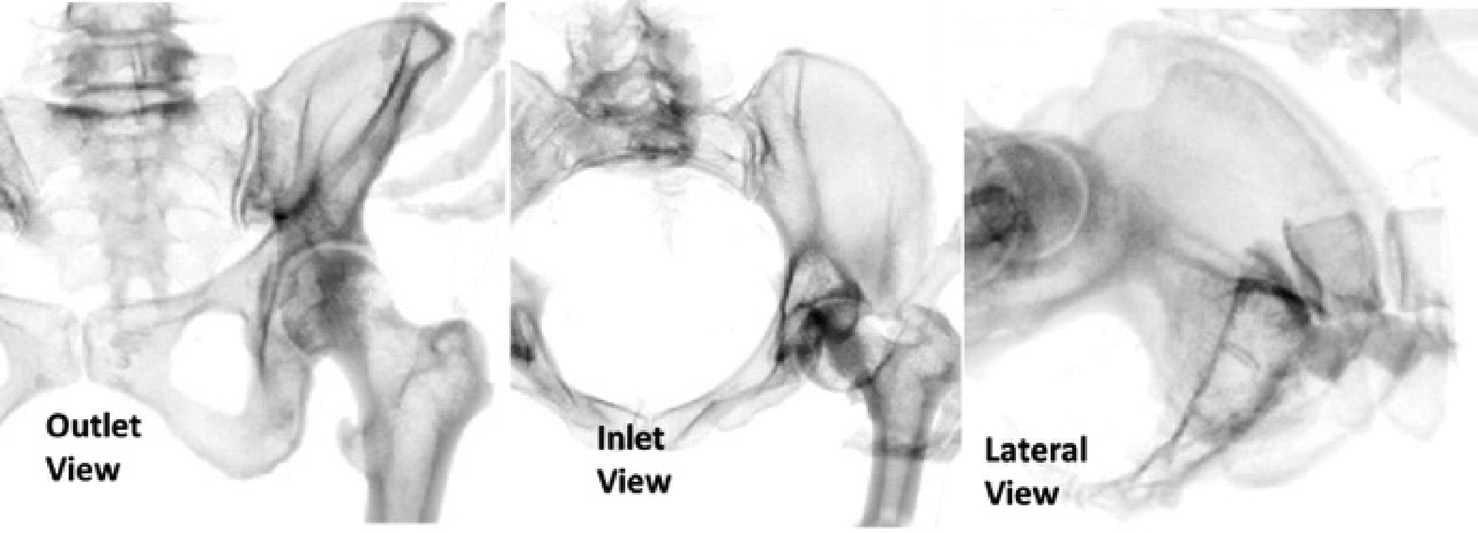
为了向住院医师显示正确的图像,对模拟器的软件进行了调整。使用可视人计划的CT数据VR 1生成了该手术中使用的透视图像(图6)。该手术使用三个主要透视视图:出口视图、入口视图和侧位视图。入口视图和出口视图是用于引导导丝导航的主要视图。这两个视图相对于患者处于斜角,使得导丝轨迹和必要调整难以判断。学会在这两个视图中正确评估导丝轨迹被认为是该手术的主要技能之一。
骶髂螺钉模块实施
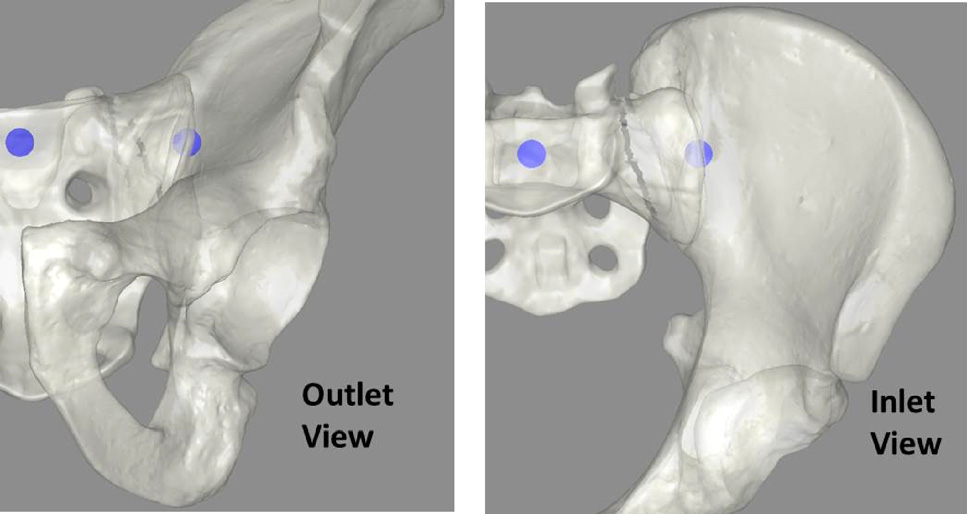
新型骶髂模拟器在六名第一年骨科住院医师中进行了试点测试。住院医师均签署知情同意书,参与本研究作为经IRB批准的研究实验(IRB编号#201409755)的一部分。每位住院医师均接受一项任务训练,旨在培训其在出口视图、入口视图以及结合三维环境下的导丝引导能力。该任务包含一系列叠加在渲染的透视图像上的目标气泡对(图7)。住院医师手持手术钢丝置于半骨盆上,并调整其方向,使沿导丝投射的线穿过骨骼内的两个目标。该任务旨在模拟手术中的步骤在外科医生钻孔前调整导丝方向的步骤中,每组目标气泡允许住院医师最多进行五次导丝调整以正确放置导丝。如果导丝准确放置,则会呈现新的一组目标,且此次目标的气泡直径更小。如果住院医师在五次尝试后失败,则新的目标将具有更大的直径。初始目标尺寸的直径为5毫米(0.2英寸)。每次准确放置导丝,住院医师可获得5分。若连续命中多个目标,或击中直径小于原始目标尺寸的目标,则给予奖励分。
当住院医师使用模拟器时,也收集了关于模拟器本身性能的数据。如果计算出错误的导丝位置,或模拟器算法出现问题导致未向住院医师显示导丝,则用于该请求的透视拍摄的原始图像将被保存到存储库中。随后对这些图像进行检查,以确定错误是源于机械问题(如模拟器焦点或工作体积)、算法问题,还是用户错误(例如手遮挡导丝)。
结果
在量化模拟器精度时,使用的两个主要指标是:导丝尖端精度和导丝轨迹精度。通过将计算出的尖端位置与已知的尖端位置进行比较,导丝尖端误差在0.25毫米(0.01英寸)到4.85毫米(0.19英寸)之间变化。平均而言,导丝尖端误差为1.7毫米(0.067英寸)。导丝角度误差在0.04度到4.3度之间变化。平均角度误差为1.31度。在所有测试中,计算姿态的平均时间为1.05秒,远在手术中典型的荧光透视图像采集范围。表1显示了在不同测试位置下,29个参考位置的尖端位置和轨迹测量的平均误差测量。
| 位置 | 平均尖端误差(毫米) | 平均角度误差(度) | 平均计算时间(秒) |
|---|---|---|---|
| 桌面 | 1.53 | 1.15 | 1.12 |
| 干性实验室 | 1.59 | 1.31 | 1.03 |
| 会议室 | 1.61 | 1.12 | 1.01 |
| 湿性实验室 | 1.97 | 1.18 | 1.08 |
| 图书馆 | 1.81 | 1.31 | 0.99 |
| 平均值 | 1.70 | 1.31 | 1.05 |
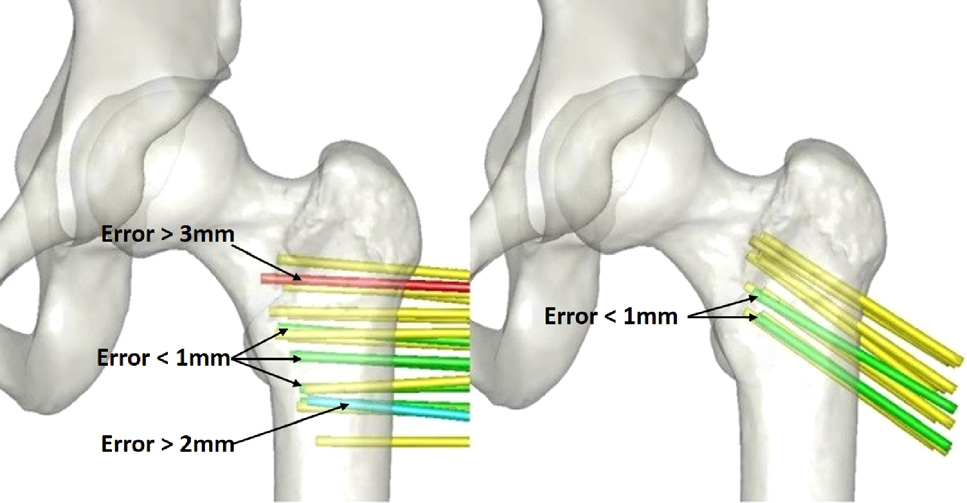
模拟器工作体积内的系统精度变化是另一个需要考虑的因素。对于骨骼中每个导丝参考位置,均查询了其精度以检查可能存在的趋势。图8显示了跨越模拟器工作体积的骨骼内导丝位置的彩色编码映射。大多数导丝位置在尖端放置上的精度为1–2毫米。最大误差出现在靠近模拟器工作体积边缘的一个导丝位置,其平均误差值大于3毫米。有六个导丝位置的平均误差小于1毫米,这些位置均趋向于工作体积的中心区域。
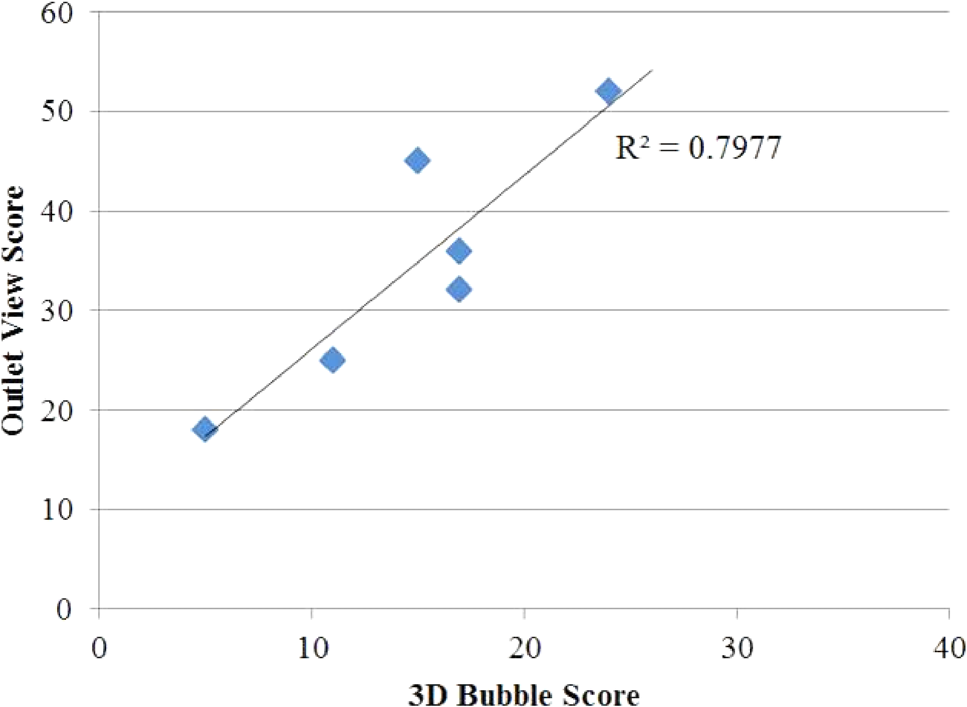
参与骶髂模块气泡靶标练习的住院医师的表现见表2。入口任务的平均得分为33.3,意味着在训练期间,住院医师平均能在入口视图中至少命中目标六次(每次在该二维平面内命中目标可获得5分)。在出口视图中,平均得分为34.6,再次表明住院医师在训练期间能在出口视图中至少命中目标六次。然而,在综合三维任务中,平均得分仅为14.8,表明住院医师在训练期间仅能命中三维靶标2到3次。这表明将导丝准确置于三维位置比在单一平面内准确放置更具挑战性,这在直觉上是合理的。然而,起初尚不明确的是哪一个平面更难操作,或哪一个平面对正确实现三维位置导丝置入的影响更大。每位住院医师在入口视图中的表现与其在三维任务中表现之间的相关性具有R²值0.36。同样,每位住院医师在出口视图中的表现与其在三维任务中表现之间的相关性具有R²值0.79(图9)。
| 住院医师 | 入口视图 | 出口视图 | 综合三维任务 |
|---|---|---|---|
| 1 | 20 | 25 | 11 |
| 2 | 19 | 18 | 5 |
| 3 | 39 | 52 | 24 |
| 4 | 31 | 45 | 15 |
| 5 | 30 | 36 | 17 |
| 6 | 61 | 32 | 17 |
在六名住院医师进行骶髂目标任务训练的过程中,共采集了948幅图像。其中,74幅图像(7.8%)触发了系统故障。这些故障中,35次是由于住院医师的手遮挡了摄像头对导丝的视野,15次是由于导丝超出了模拟器的工作体积,4次是由于对焦不良的图像,20次是由于底层模拟器算法存在缺陷,该缺陷随后已被修复。
讨论
导线导航是骨科领域中的一项核心技能,具有多种应用。开发一种能够涵盖这些应用的训练工具,显然具有诸多益处,不仅有利于骨科医生社区,也有利于最终接受手术的患者。鉴于我们的团队在使用导丝导航模拟器对住院医师进行髋部应用训练时获得了积极反馈,我们致力于探索该模拟器平台整合其他导丝导航任务的能力。在本研究中,模拟器精度、工作体积定义和触觉反馈是创建新模拟器应用设计空间的主要标准。我们发现,该模拟器能够将导丝准确定位在平均1.7 mm(0.067 in.)、1.31度范围内,并在1.05秒内向住院医师显示相应图像。随着使用模拟器的外科医生技能水平提高,或导丝导航应用的变化,此精度水平可能足够或需要进一步提升。
在骶髂螺钉的应用中,住院医师需将导丝放置于直径约14 mm(0.55 in.)的通道内。尽管未正式收集定性反馈,但呈现给住院医师的图像精度似乎提供了足够的真实感,使该任务被认可为有效。然而,在其他应用中,可能需要更高的精度以达到相同的真实感水平。例如,手部骨折通常可通过导丝导航技术治疗。在这种情况下,外科医生试图放置导丝的通道可能仅略大于模拟器能够精确放置导丝的范围。此时,可能需要调整模拟器的设计参数,例如光学系统的分辨率,以提供必要的精度。
除了表征模拟器的精度外,本研究还考察了精度在工作体积内的变化情况。图8表明,尽管未观察到明显的偏差或模式,但当接近光学视野框边缘时,模拟器的精度略有下降。导丝位置的平均值精度小于1 mm(0.039 in.)的情况通常位于工作体积的中心区域。仅有两个测试位置的导丝精度误差大于2 mm(0.079 in.),且这两个位置均靠近工作体积的远端边缘。这一结果在一定程度上是可预期的,因为工作体积的中心区域是摄像头最清晰对焦的位置,而在工作体积的边缘区域,摄像头会开始失去焦点。在未来应用开发中,考虑到不同级别的精度和工作体积需求,这可能是一个重要的设计因素。
实施骶髂定位任务是测试新模块设计的重要一步。尽管理论模型满足了设计标准,但在真实用户使用设备时,总会暴露出一些未曾预料的问题。在此情况下,对使用过程中标记出的系统故障进行分析,揭示了两个意料之外的发现。首先,大多数错误源于住院医师在请求图像时将手放置在导丝上。这类行为说明了手术室环境与模拟环境之间有时存在的行为脱节。在手术室中,外科医生通常会用手支撑导丝,以确保其沿预期轨迹钻入导丝。鉴于模拟器不应抑制与手术室相关的行为,这为未来版本的设计提出了挑战。然而,将手置于视野内会导致外科医生受到额外的辐射暴露。第二个意外行为是导丝被放置在模拟器工作体积之外,占74次系统故障中的15次。尽管根据文献回顾所定义的操作流程,模拟器的理论工作体积本应绰绰有余,但学习者可能存在超出这些边界范围的行为。此外,人工骨骼周围的软组织并未明确提示光学系统的范围限制。如果能在软组织上标出某种边界线,或许可避免此类错误的发生。
然而,这些信息可用于指导住院医师放置导丝,而这些信息在手术室中是无法获得的。
骶髂定位任务的结果显示,住院医师在出口视图中引导导丝的能力与其在三维定位任务中引导导丝的能力之间存在显著关联(图9)。这表明出口视图可能更难以解读或操作,因此在此平面上的练习是住院医师提高骶髂螺钉任务能力的关键。尽管两种视图对于手术成功都至关重要,但这一结果可能有助于减少此类手术中的并发症,因为出口视图是外科医生观察导丝相对于神经根路径行进位置的主要视角。或许通过更加重视在此平面上的操作学习,外科医生能够更好地在骶髂关节处植入植入物,从而减少患者的并发症。
本研究的一个潜在局限性是使用导丝导航模拟器上骶髂模块的住院医师样本量小。随着更多住院医师接触此任务,本研究中观察到的一些行为模式可能会发生变化或变得不那么明显。此外,所有与该模块交互的住院医师均为第一年的初级外科医生。鉴于骶髂螺钉置入是一项相对高级的任务,针对更高级别的外科医生进行培训会更为合理。在这种情况下,经验更丰富的外科医生可能不会轻易接受系统的精度或分辨率,并可能认为其未能充分反映他们在手术室中的实际体验。
结论
本研究已成功证明,能够将原本为髋部应用开发的现有导丝导航平台适应于新的应用,例如骶髂螺钉置入。通过对模拟器现有功能以及其他手术所需功能的仔细评估,可对模拟器进行修改,以呈现用于骶髂螺钉置入的新外科应用场景。此外,通过骨科住院医师的测试,已证实该模拟器在新应用中的可靠性,并初步揭示了在单平面导航与三维空间导航之间可能存在的新关系。未来还需对更多住院医师进行进一步测试,以验证骶髂模块作为骨科医生有效训练工具的价值。
资助数据
- 美国骨科手术委员会(资助机构ID:10.13039/100013619)
- 医疗保健研究与质量局(资助号1 R18 HS022077和5 R18 HS025353;资助机构ID:10.13039/100000133)

















 2025
2025

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









