




参考江科大STM32视频。
一、输出比较
1. OC(Output Compare)输出比较
- 输出比较可以通过比较CNT与CCR寄存器值的关系,来对输出电平进行置1、置0或翻转的操作,用于输出一定频率和占空比的PWM波形
- 每个高级定时器和通用定时器都拥有4个输出比较通道
- 高级定时器的前3个通道额外拥有死区生成和互补输出的功能
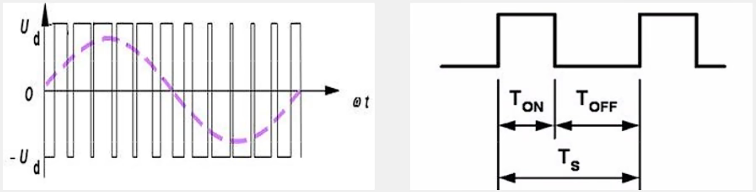
2. PWM (Pulse Width Modulation)脉冲宽度调制
- 在具有惯性的系统中,可以通过对一系列脉冲的宽度进行调制,来等效地获得所需要的模拟参量,常应用于电机控速等领域
- PWM参数︰频率=1/ Ts 占空比=Ton/ Ts 分辨率=占空比变化步距
3. 输出比较通道(通用)
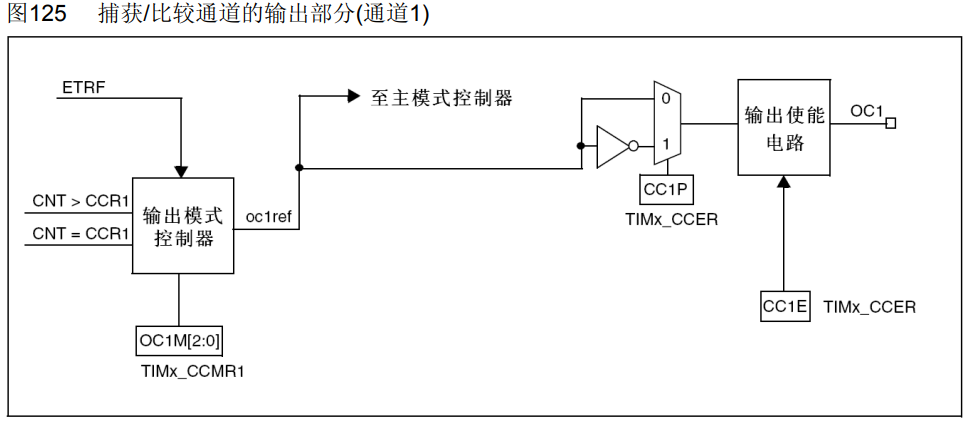
输出比较模式

PWM基本结构
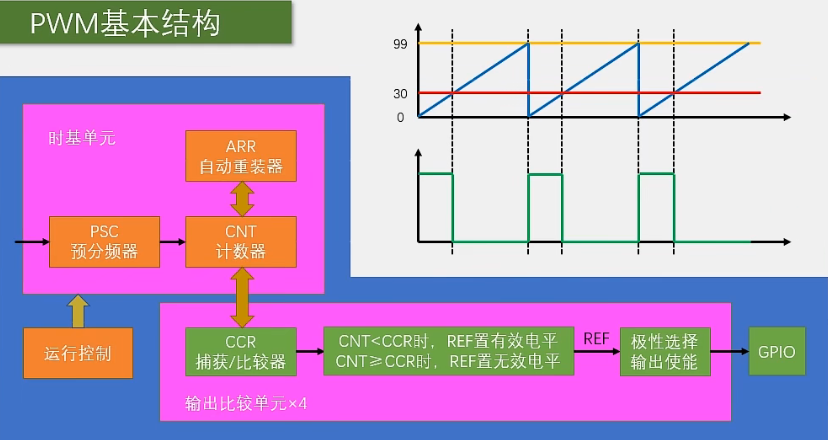
参数计算
- PWM频率: Freq = CK_PSC / (PSC+1)/ (ARR+1)
- PWM占空比: Duty = CCR /(ARR +1)
- PWM分辨率: Reso = 1/(ARR+1)
二、程序部分
用PWM实现LED呼吸灯。
注意所用引脚对应的定时器及通道,选择对应的函数。
如本文使用PB0引脚,对应TIM3_CH3,选择改变PWM的CCR值要选用函数TIM_SetCompare3();
PWM.c
#include "stm32f10x.h" // Device header
#include "led.h"
void PWM_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
RCC_APB2PeriphClockCmd(LED_GPIO_CLK,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Pin = LED_GPIO_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(LED_GPIO_PORT,&GPIO_InitStruct);
TIM_InternalClockConfig(TIM3);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure); //给结构体赋初始值
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0; //CCR
TIM_OC3Init(TIM3,&TIM_OCInitStructure);
TIM_Cmd(TIM3,ENABLE);
}
void PWM_SetCompare3(uint16_t Compare)
{
TIM_SetCompare3(TIM3,Compare);
}
main.c
#include "stm32f10x.h" // Device header
#include "led.h"
#include "PWM.h"
#include "delay.h"
int main(void)
{
uint8_t i;
LED_GPIO_Config();
PWM_Init();
delay_init();
while (1)
{
for(i = 0; i <= 100; i++)
{
PWM_SetCompare3(i);
delay_ms(10);
}
for(i = 0; i <= 100; i++)
{
PWM_SetCompare3(100 - i);
delay_ms(10);
}
}
}
引脚功能重定义
开启AFIO时钟
使用GPIO_PinRemapConfig();函数

















 9万+
9万+




 到【灌水乐园】发言
到【灌水乐园】发言







