






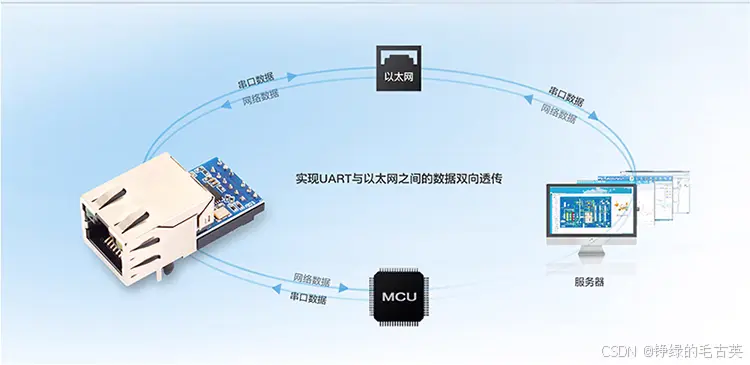
本文章介绍了单片机通过串口与我们PC端的UDP网络助手进行通信的过程,我们将单片机的串口协议数据通过USR-K6(UART转Enternet)转换为以太网的UDP协议数据进行传输,下面是协议及模块的介绍以及配置步骤。
一、协议介绍
UDP是User Datagram Protocol的简称,中文名是用户数据报协议,是OSI参考模型中的传输层协议,它是一种无连接的传输层协议,提供面向事务的简单不可靠信息传送服务。UDP的正式规范是IETF RFC768。UDP在IP报文的协议号是17。
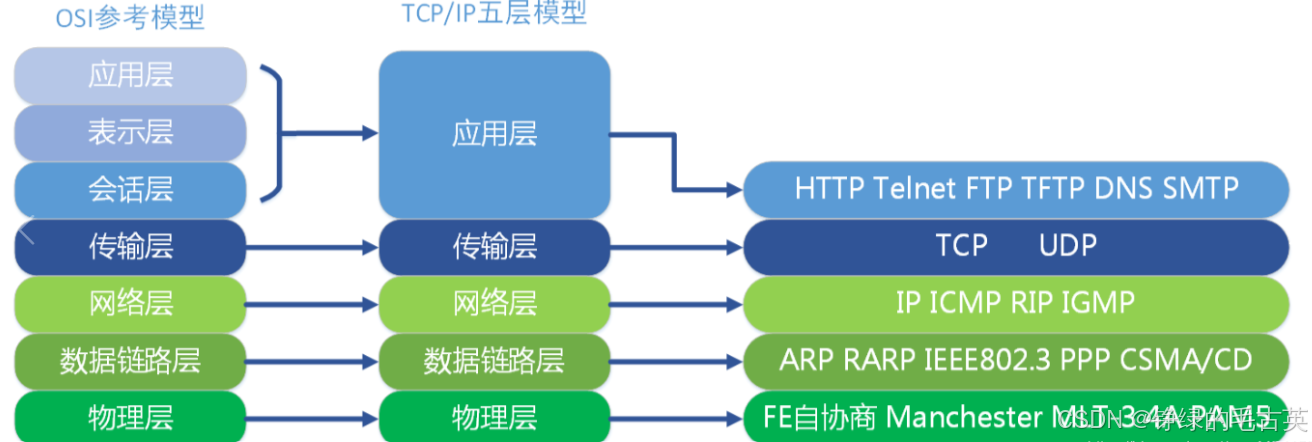
在OSI模型中,UDP在第四层——传输层,处于IP协议的上一层。UDP有不提供数据包分组、组装和不能对数据包进行排序的缺点,也就是说,当报文发送之后,是无法得知其是否安全完整到达的。UDP用来支持那些需要在计算机之间传输数据的网络应用。包括网络视频会议系统在内的众多的客户/服务器模式的网络应用都需要使用UDP协议。与所熟知的 TCP(传输控制协议)协议一样,UDP 协议直接位于 IP(网际协议)协议的顶层。根据 OSI(开放系统互连)参考模型,UDP 和 TCP 都属于传输层协议。
UDP 协议的主要作用是将网络数据流量压缩成数据包的形式。一个典型的数据包就是一个二进制数据的传输单位。每一个数据包的前 8 个字节用来包含报头信息,剩余字节则用来包含具体的传输数据。
串口UART协议我们将不在此做过多的赘述。
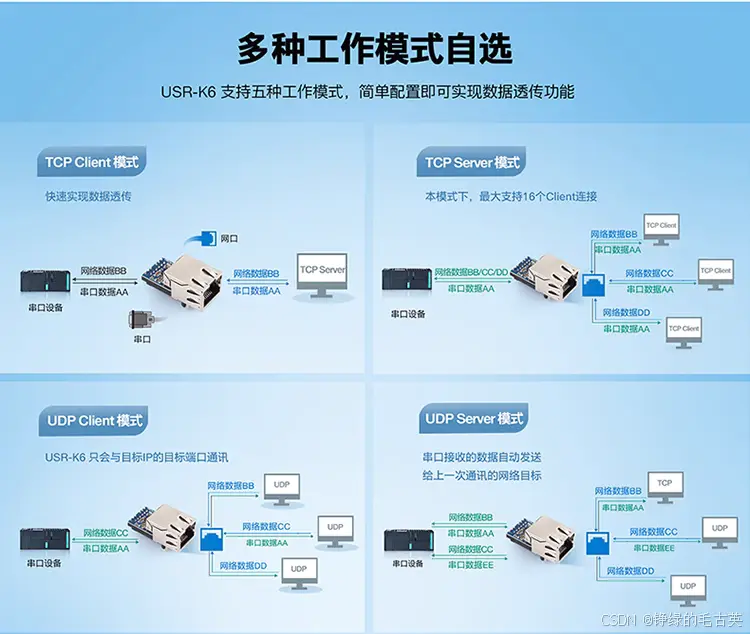
二、有人物联网(公司)USR-K6模块

三、UDP Server服务端上位机Python完整代码(利用PyQt5实现)
作者:家浩 丁
时间:02 11 2025
import sys
import socket
import threading
from PyQt5.QtWidgets import QApplication, QWidget, QVBoxLayout, QLabel, QLineEdit, QPushButton, QTextEdit
class UDPServer(QWidget):
def __init__(self):
super().__init__()
self.initUI()
# 创建UDP socket
self.sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
# 启动接收数据的线程
self.receiver_thread = threading.Thread(target=self.receive_data)
self.receiver_thread.daemon = True # 设置为守护线程
def initUI(self):
layout = QVBoxLayout()
# IP 输入框
self.ip_input = QLineEdit(self)
self.ip_input.setPlaceholderText("输入服务器IP地址 (例如: 127.0.0.1)")
layout.addWidget(self.ip_input)
# 端口输入框
self.port_input = QLineEdit(self)
self.port_input.setPlaceholderText("输入服务器端口号 (例如: 12345)")
layout.addWidget(self.port_input)
# 启动服务器按钮
self.start_button = QPushButton("启动服务器", self)
self.start_button.clicked.connect(self.start_server)
layout.addWidget(self.start_button)
# 显示接收消息的区域
self.received_msg_area = QTextEdit(self)
self.received_msg_area.setReadOnly(True)
layout.addWidget(self.received_msg_area)
self.setLayout(layout)
self.setWindowTitle("UDP Server")
self.setGeometry(300, 300, 400, 300)
def start_server(self):
ip_address = self.ip_input.text()
port = int(self.port_input.text())
self.sock.bind((ip_address, port)) # 绑定IP和端口
self.received_msg_area.append(f"服务器已启动,监听 {ip_address}:{port}")
# 启动接收数据线程
self.receiver_thread.start()
def receive_data(self):
while True:
data, addr = self.sock.recvfrom(1024) # 接收数据
self.display_received_data(data.decode(), addr)
def display_received_data(self, message, addr):
self.received_msg_area.append(f"接收到来自 {addr} 的消息: {message}")
def closeEvent(self, event):
self.sock.close() # 关闭socket
if __name__ == "__main__":
app = QApplication(sys.argv)
server = UDPServer()
server.show()
sys.exit(app.exec_())四、单片机STM32C8T6代码
main.c
作者:家浩 丁
时间:02 11 2025
#include "stm32f10x.h"
#include "Delay.h"
#include "Serial.h"
int main(void)
{
Serial_Init();
while (1)
{
Serial_Printf("Hello,I'm K6");
Delay_ms(100);
Serial_SendNumber(666,3);
Delay_ms(1000);
}
}uart.c
作者:家浩 丁
时间:02 11 2025
#include "stm32f10x.h"
#include <stdio.h>
#include <stdarg.h>
void Serial_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1, ENABLE);
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)
{
Serial_SendByte(String[i]); }
}
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y --)
{
Result *= X;
}
return Result;
}
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0'); Serial_SendByte
}
}
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch);
return ch;
}
void Serial_Printf(char *format, ...)
{
char String[100];
va_list arg;
va_start(arg, format);
vsprintf(String, format, arg);
va_end(arg);
Serial_SendString(String);
}五、通信配置步骤
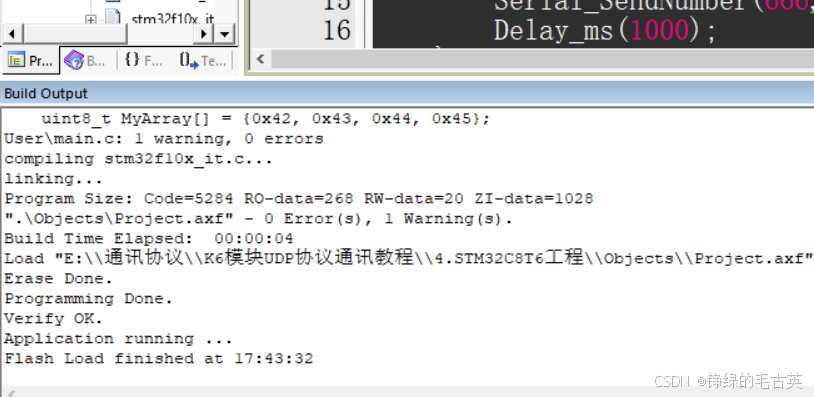
(一)将STM32连接到电脑,把配置串口的代码下载至单片机
(二)接线
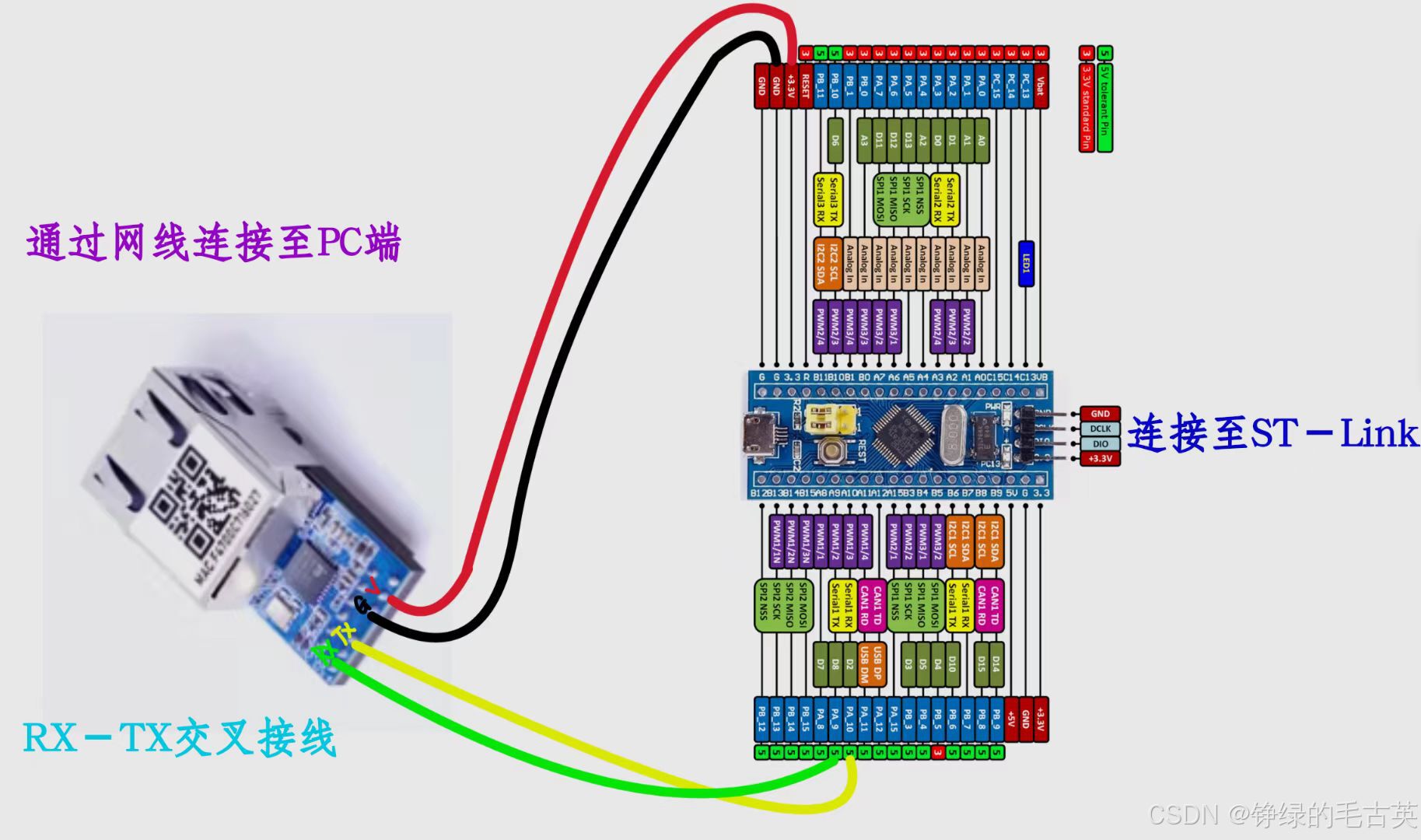
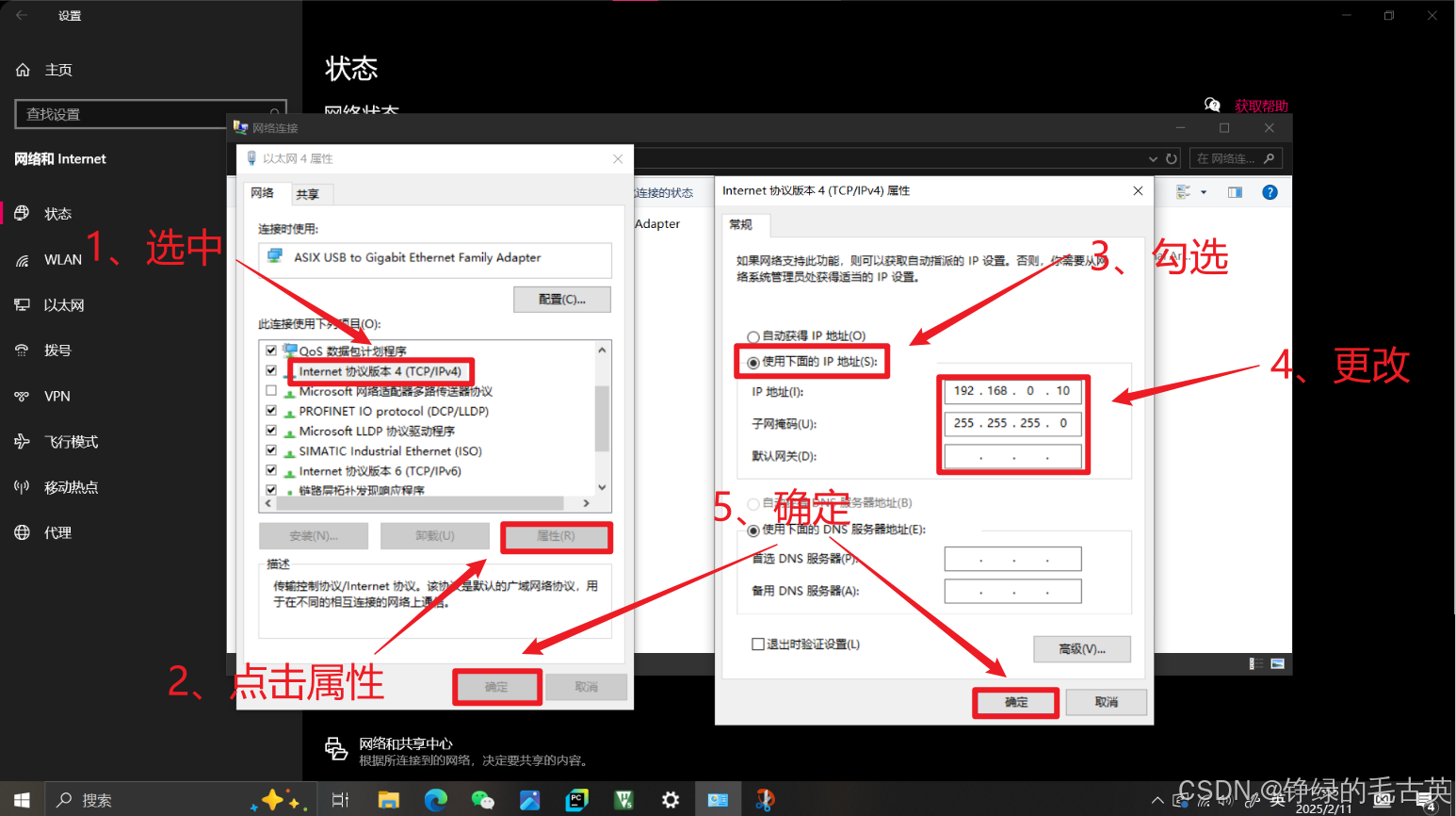
(三)设置本地IP地址
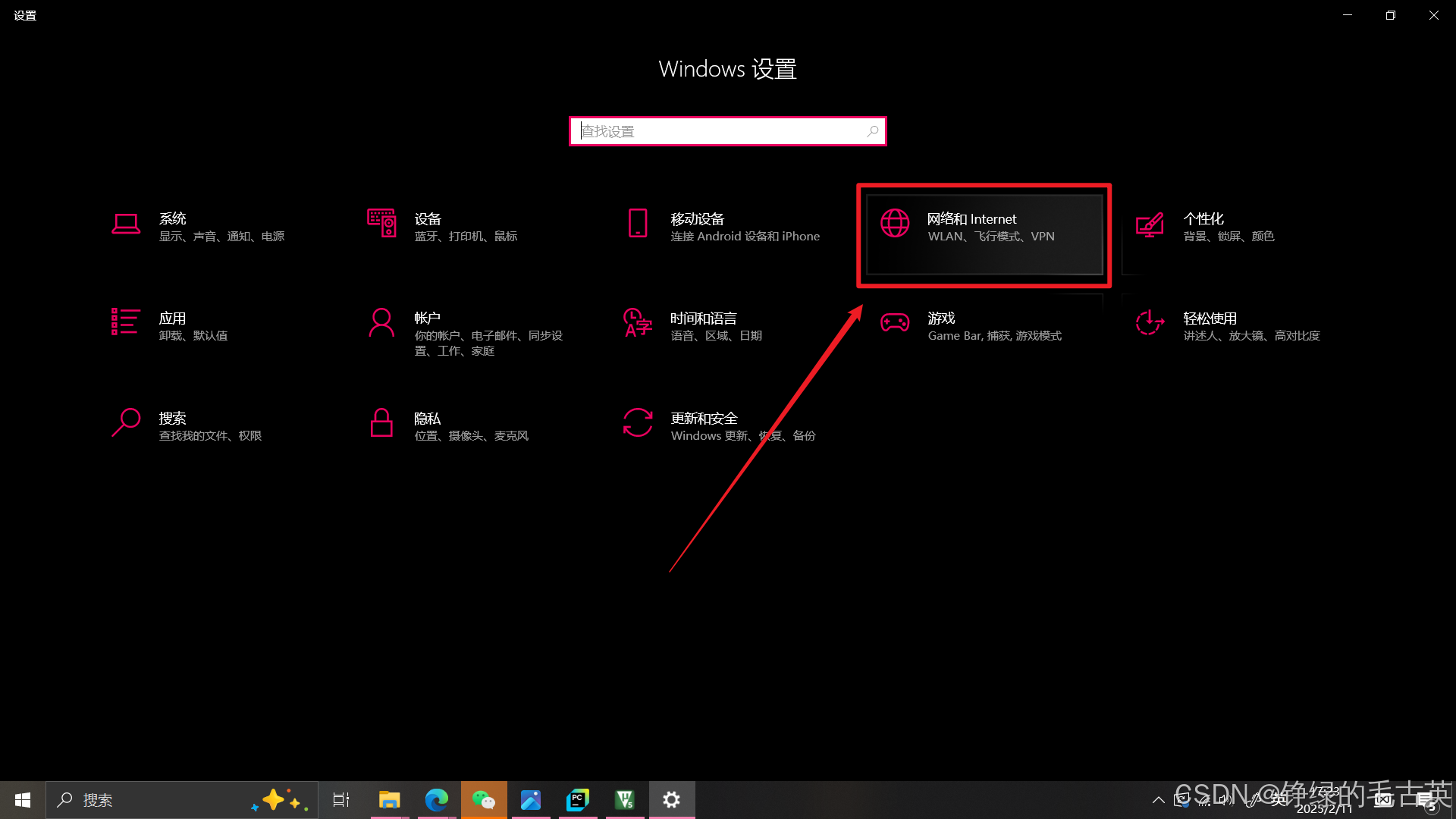
1、打开设置-“网络和Internet”
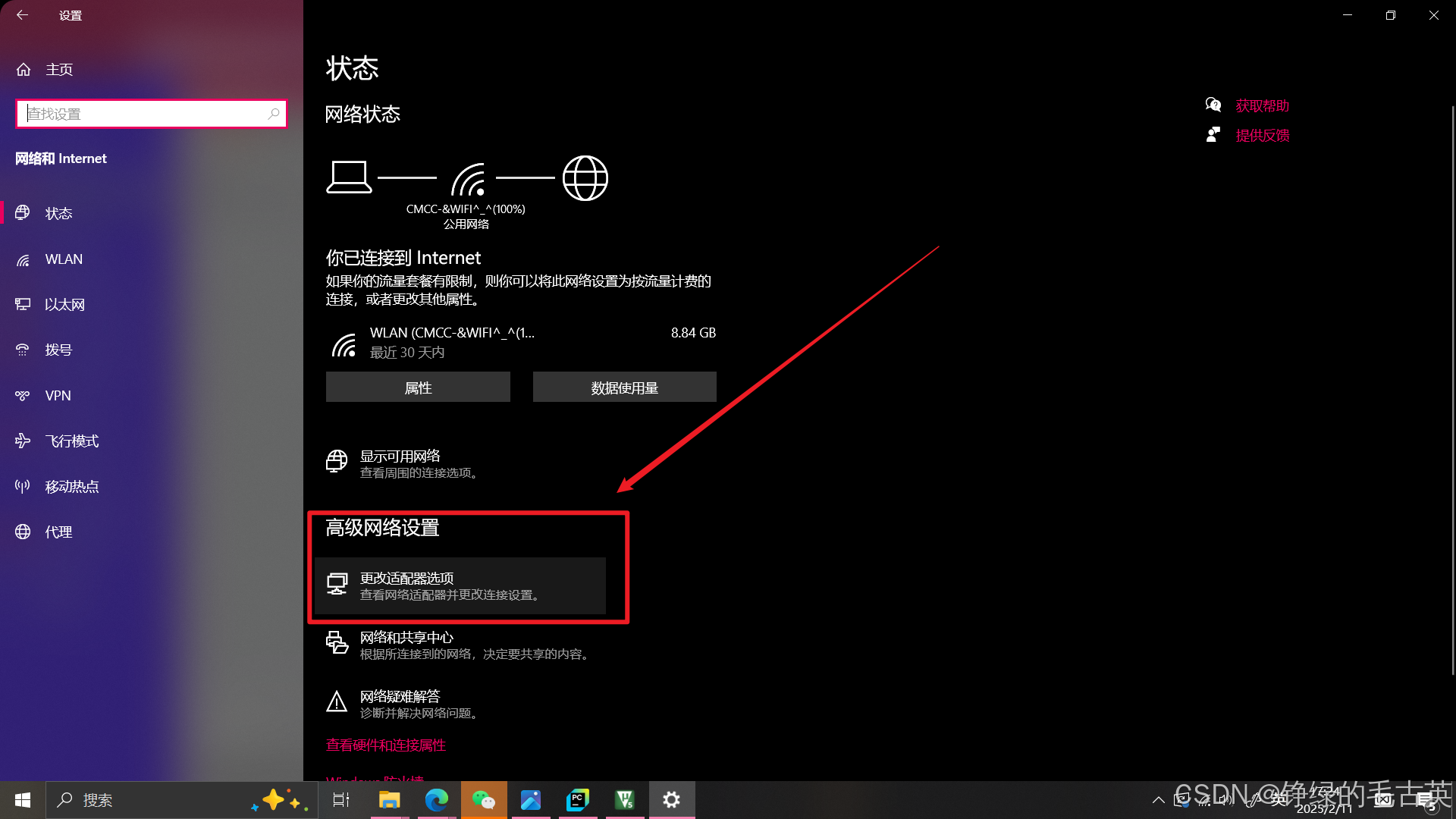
2、点击高级网络设置中的“更改适配器选项”
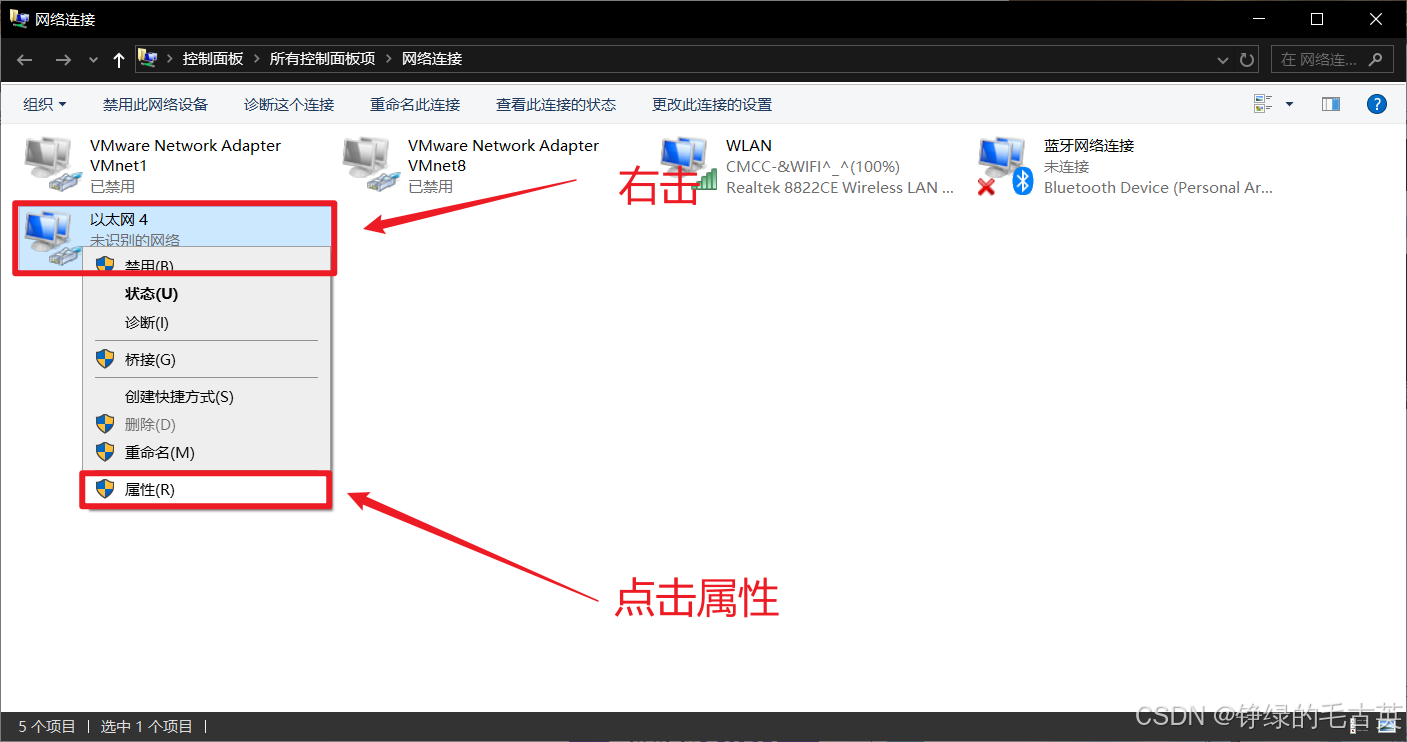
3、右击“以太网4”,点击属性
 4、更改本机IP地址,要与K6在同一网段(第三位一致)
4、更改本机IP地址,要与K6在同一网段(第三位一致)
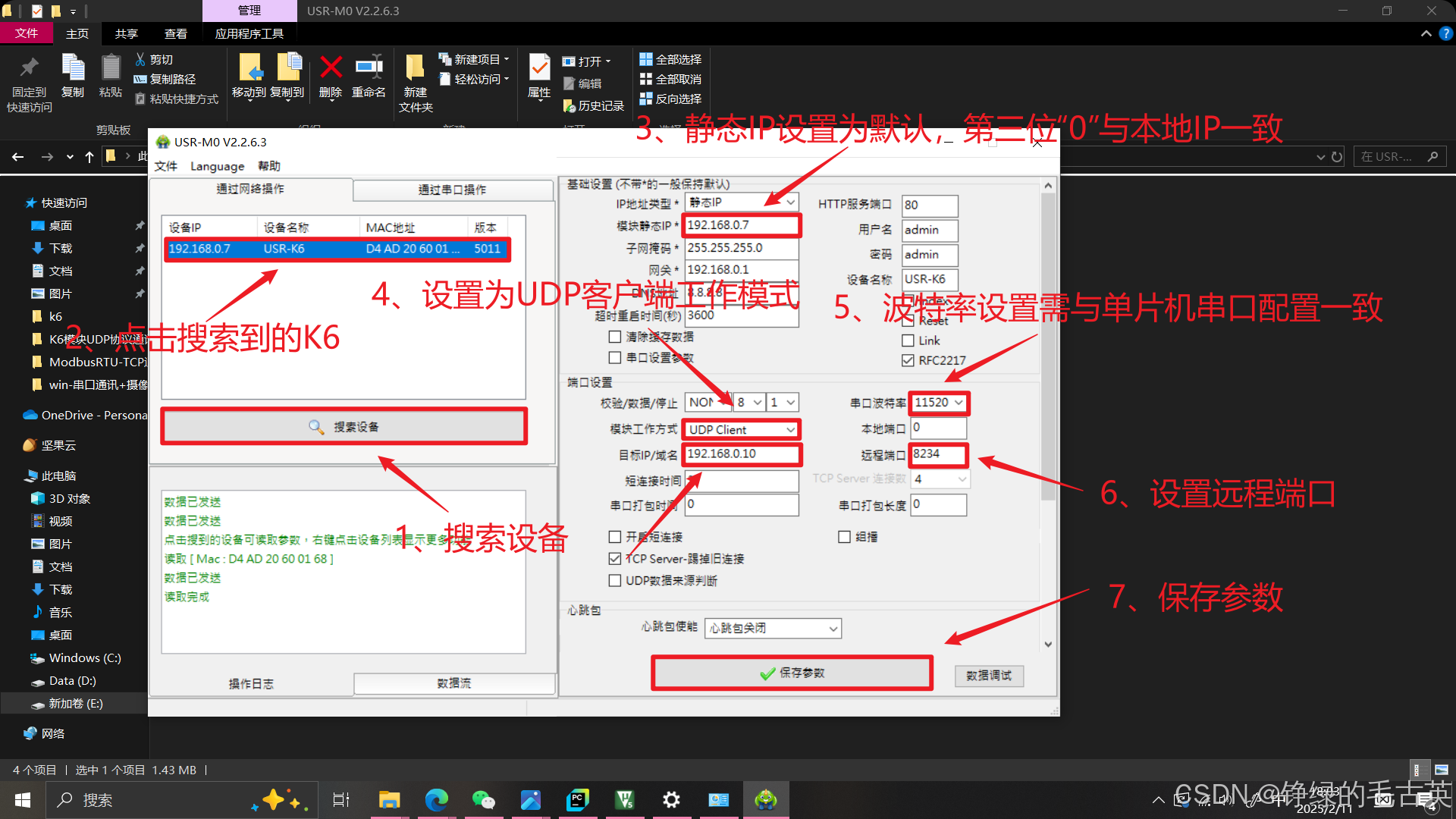
(四)配置有人K6模块(USR-M0上位机)
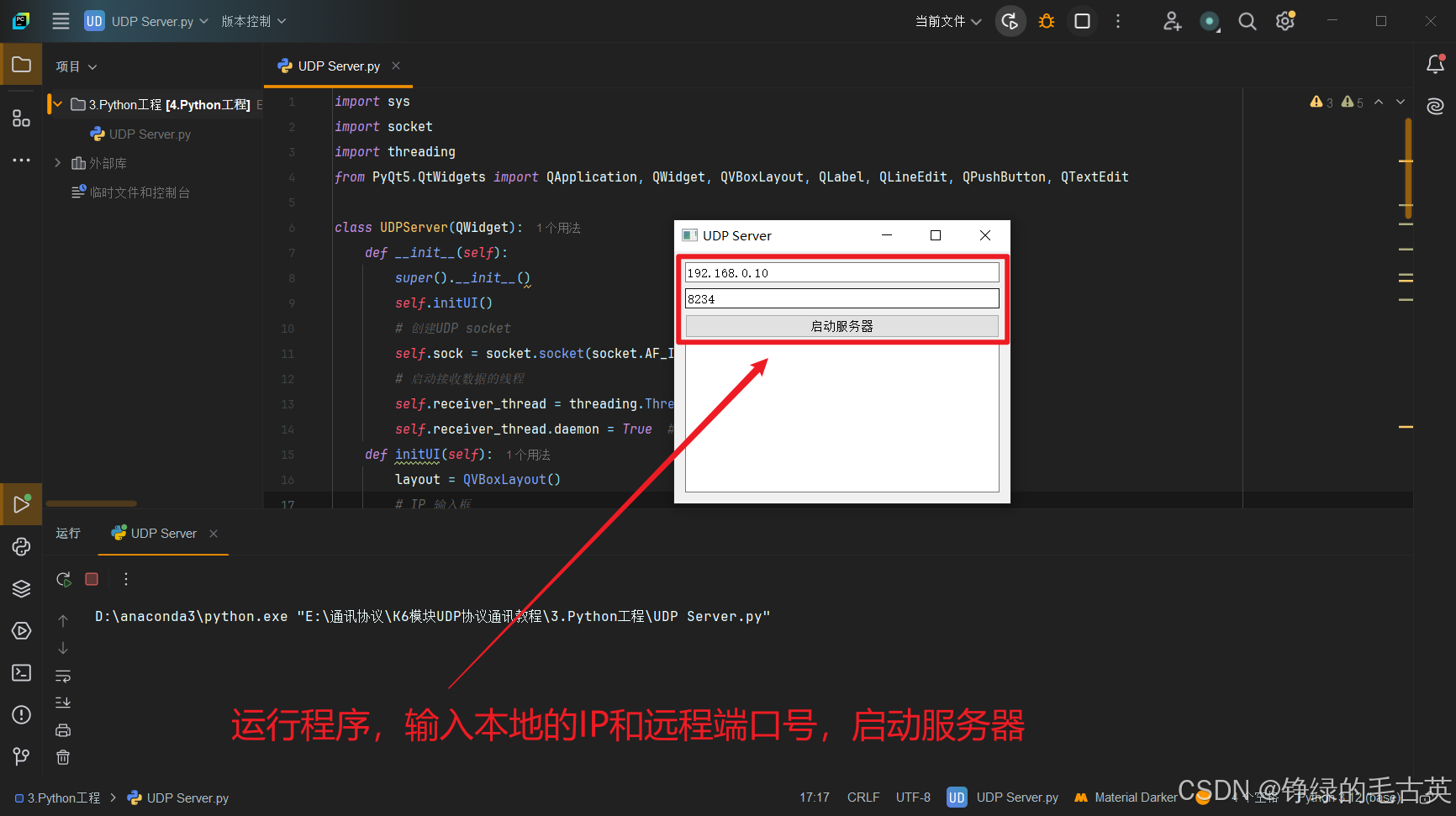
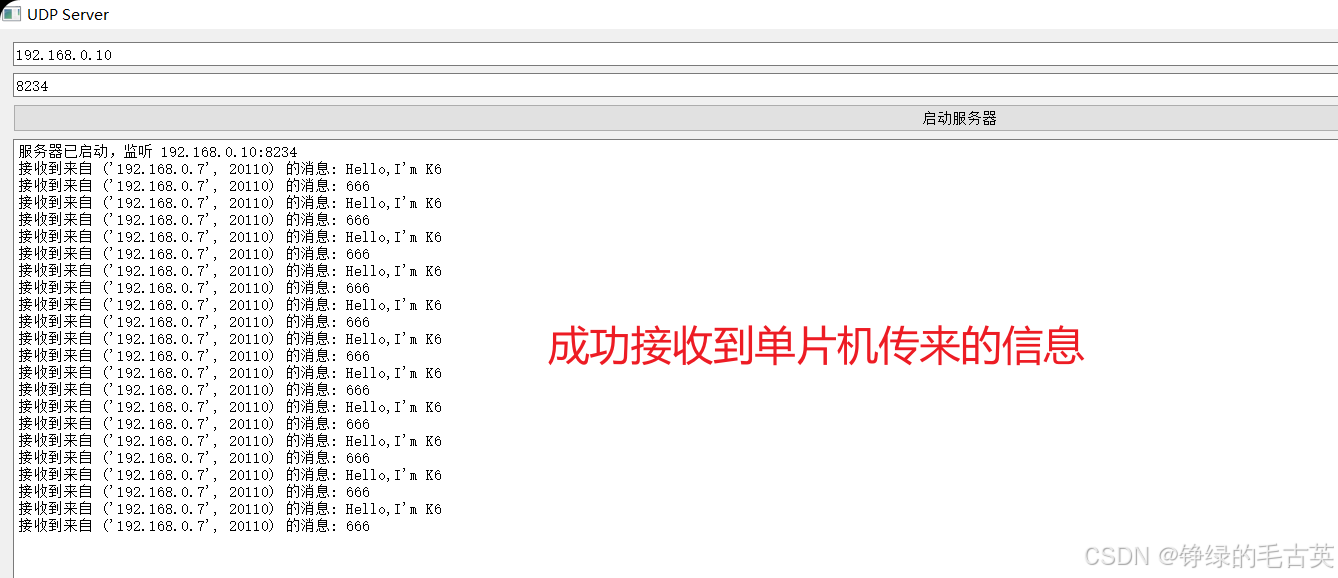
(五)测试通信
有任何问题欢迎在plq留言!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









