




 本文介绍了激光雷达的工作原理,重点比较了Gazebo(机器人虚拟环境模拟器)和RVIZ(环境信息可视化工具)的功能差异。同时,讨论了如何解析雷达消息包,包括角度范围和Python实现的避障应用。
本文介绍了激光雷达的工作原理,重点比较了Gazebo(机器人虚拟环境模拟器)和RVIZ(环境信息可视化工具)的功能差异。同时,讨论了如何解析雷达消息包,包括角度范围和Python实现的避障应用。
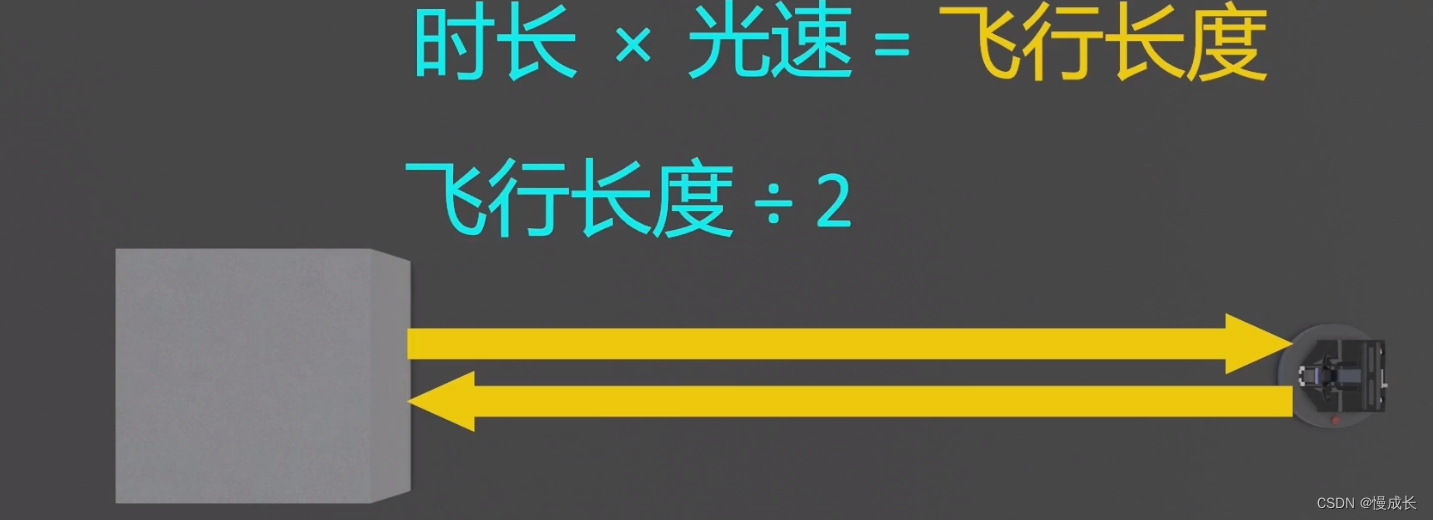
激光雷达原理
雷达有发射头和接受头,运算式子如下图
gazebo和rviz的区别
gazebo是为了显示机器人所处虚拟环境的状况,而rviz是接受传感器获取环境信息并显示的工具,gazebo实际上就是在模拟现实世界,所以当在现实世界中时,不需要启动gazebo,而rviz一直可以存在,其选择话题并获得信息显示,rviz只是一个可视化工具,不参与算法运行
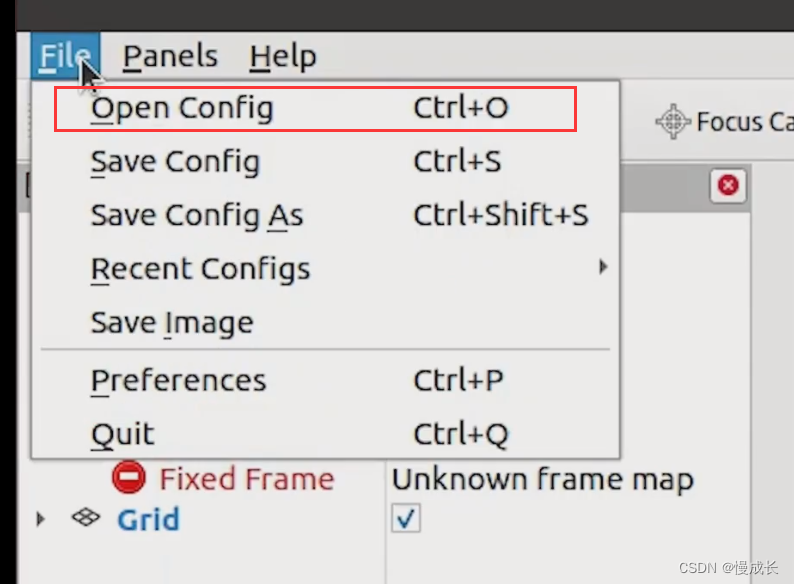
保存rviz中的配置

再打开配置
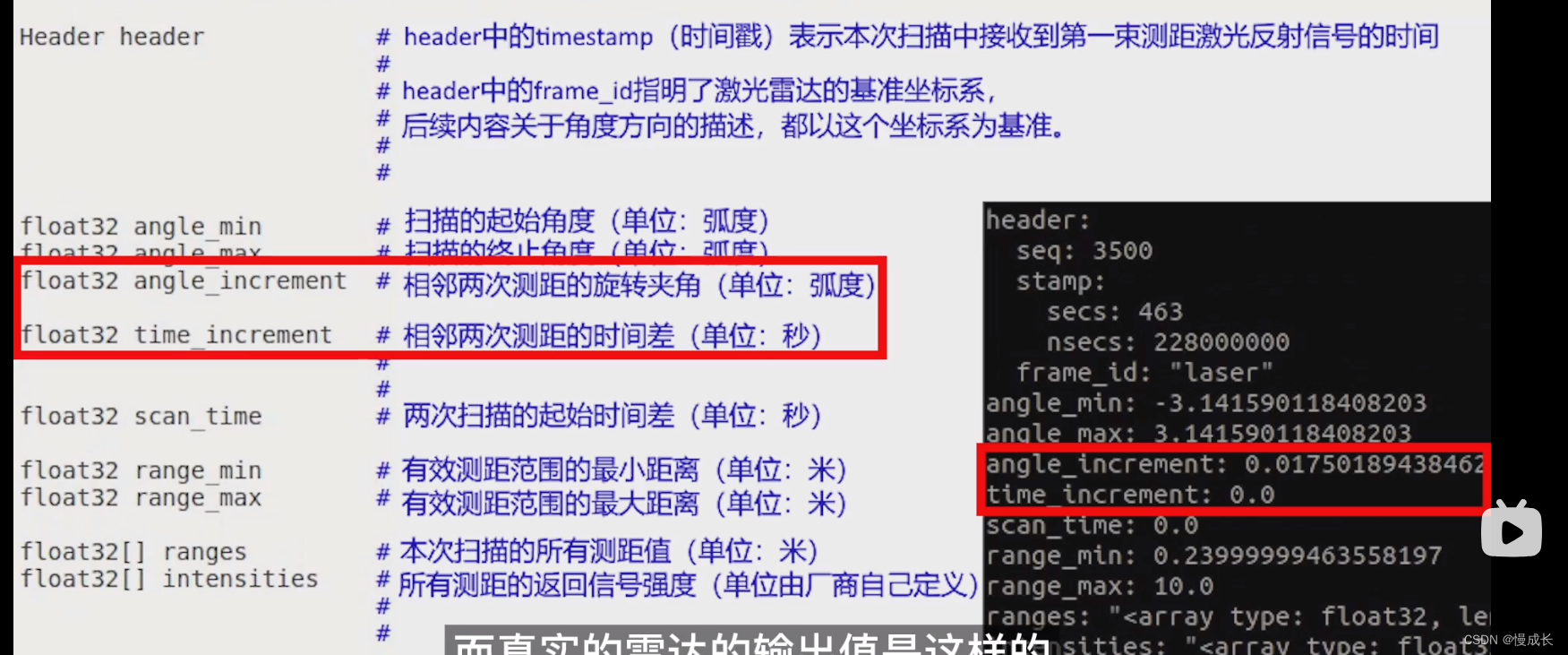
激光雷达消息包具体信息
雷达消息由 组成
组成
雷达的旋转角度,一般以雷达初始位置为0度,顺时针方向为负的度数,逆时针为正的度数
看消息具体成员,angle_min就是雷达从初始位置转π rad也即180度
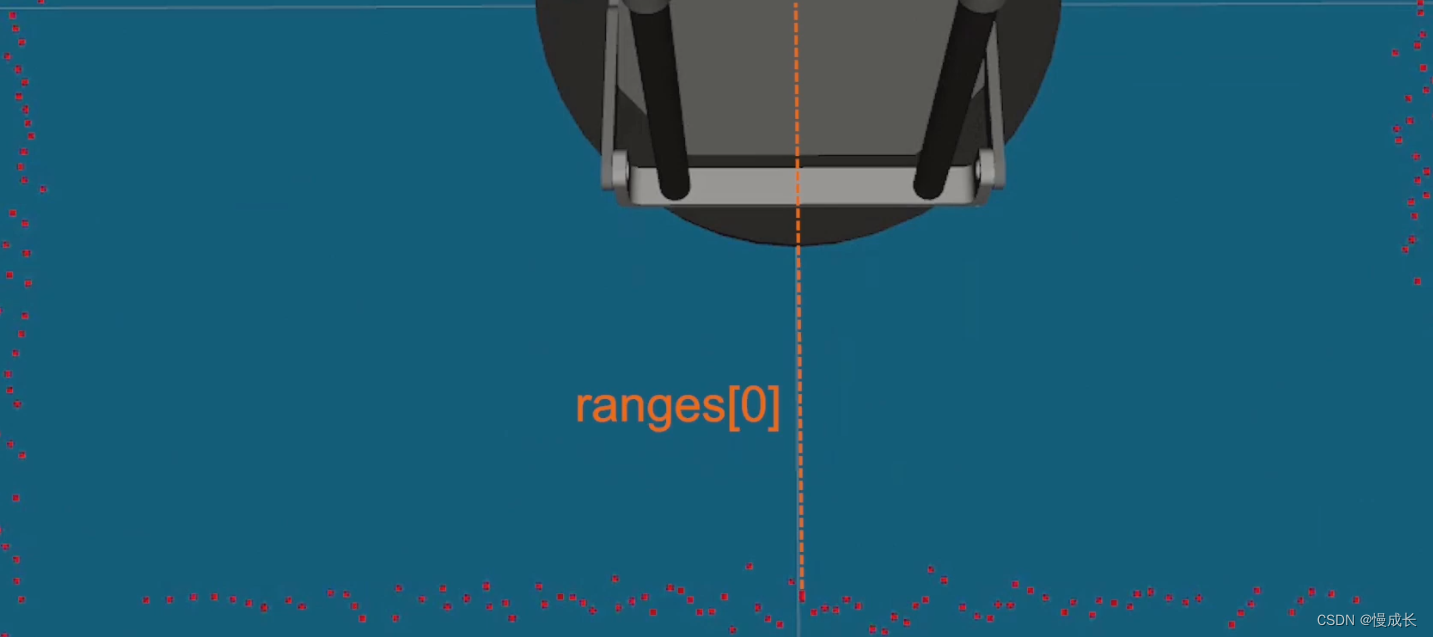
测距值:为一个有360个大小数组,第一个位置是机器人正后方,如果超出范围,那测不到了,就是无穷值
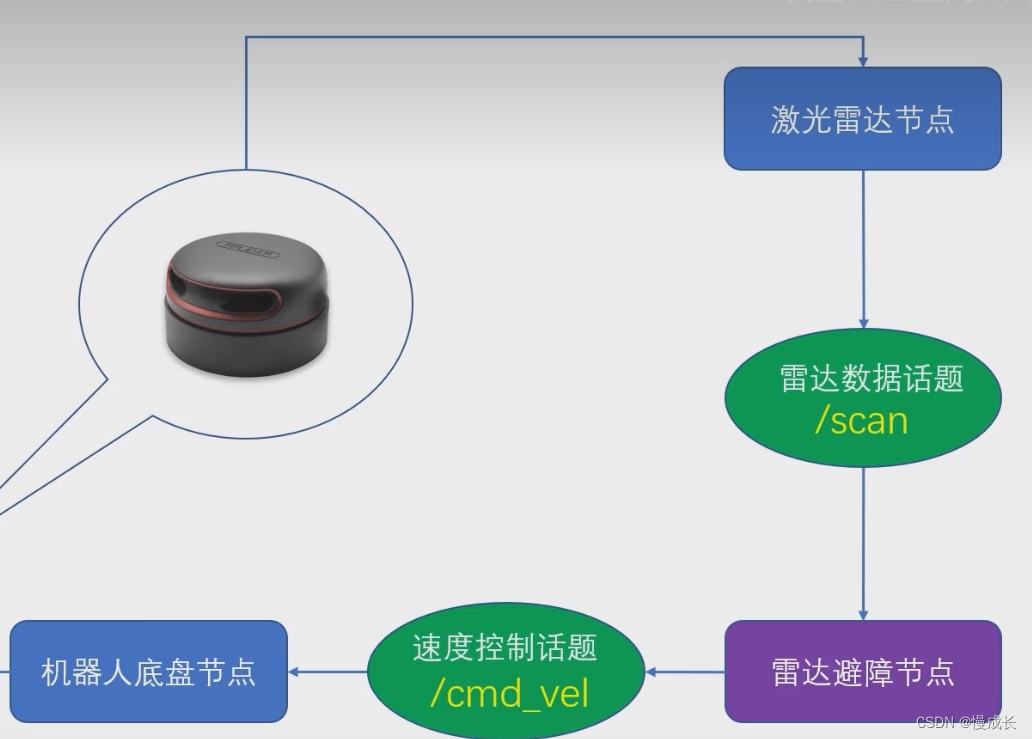
雷达避障python实现
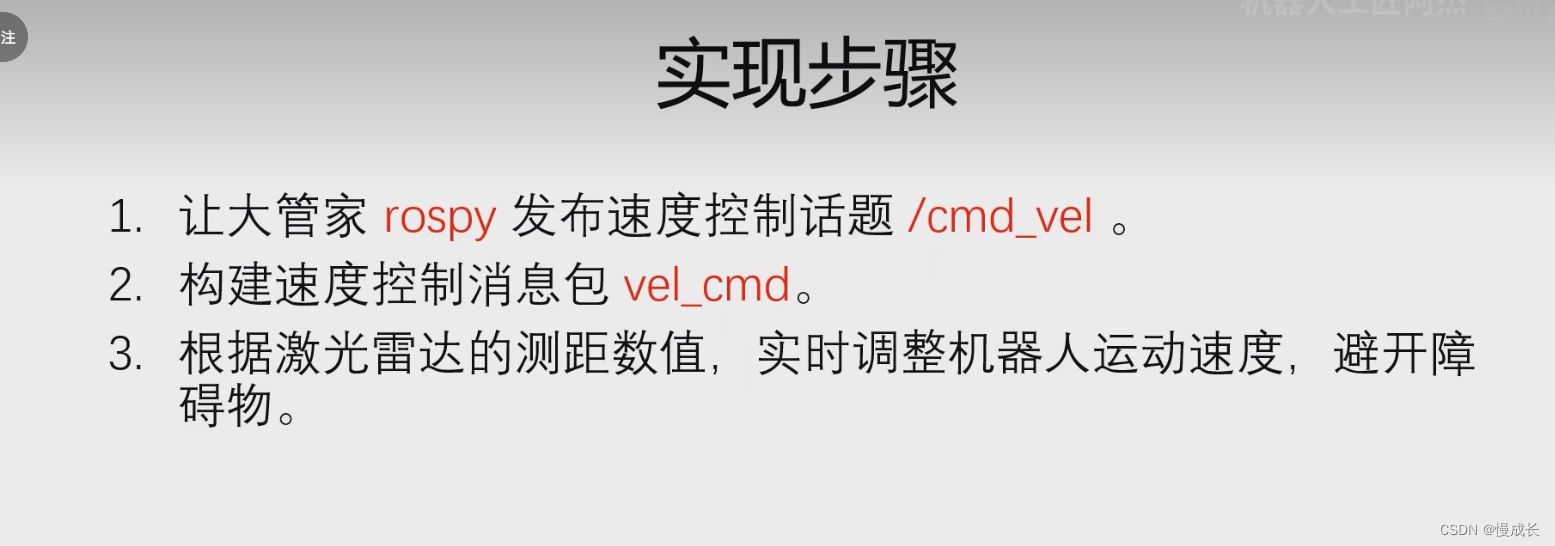
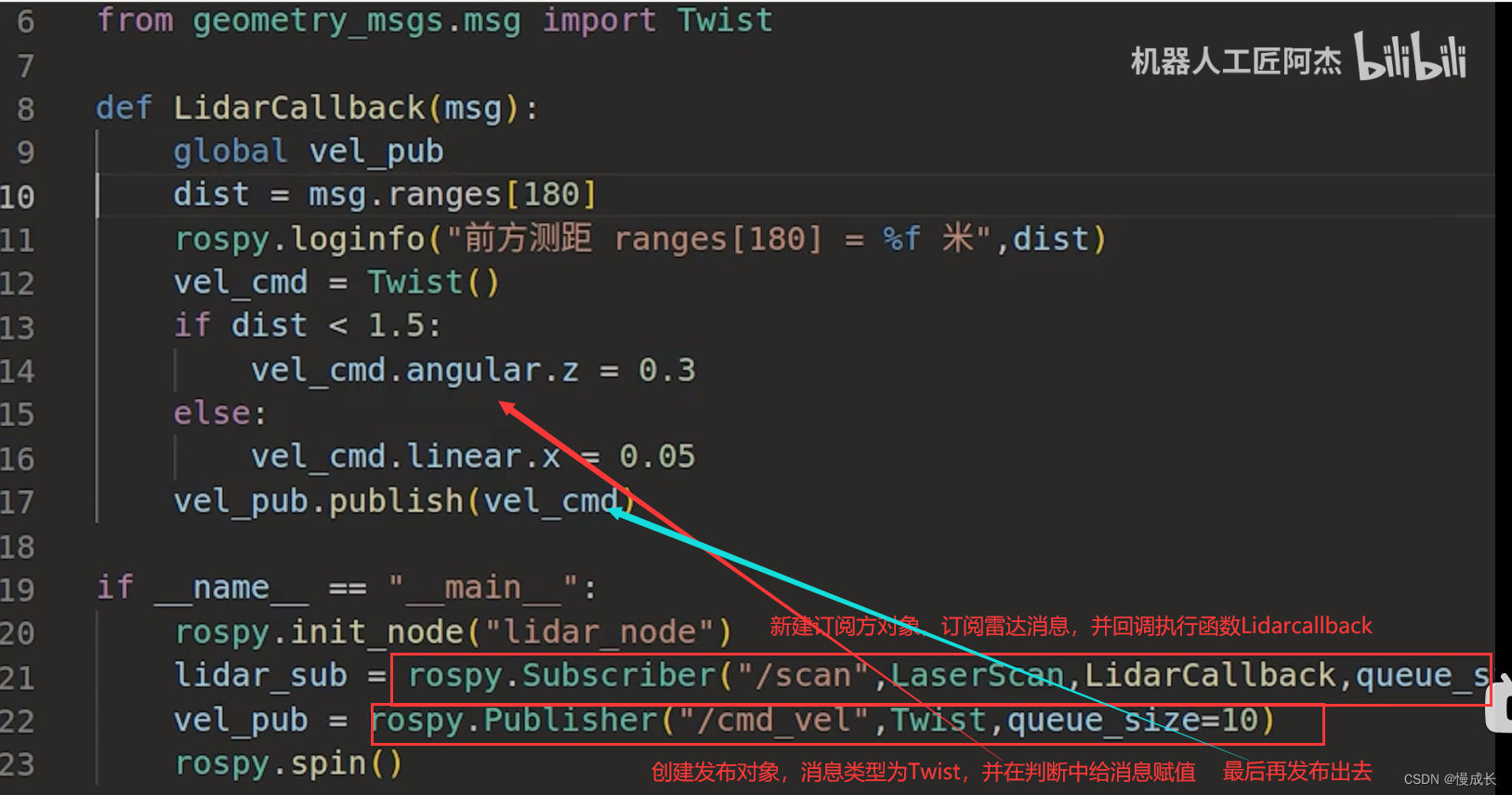
代码实现



















 1407
1407

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









