









基于改进约束支配原则的多目标进化算法:MOEA/D-ICDP的理论与实践
摘要
在工程优化中,约束多目标问题(CMOPs)广泛存在,但传统算法在处理大规模复杂不可行区域时表现不佳。本文提出了一种改进的约束支配原则(ICDP),并将其嵌入MOEA/D框架中,形成MOEA/D-ICDP算法。通过动态调整容差和适应度函数,该算法在收敛性、多样性和可行性之间取得了更好的平衡。实验表明,MOEA/D-ICDP在多个测试集和实际工程问题中均表现出显著优势。
1. 引言
现实工程优化问题通常涉及多个相互冲突的目标和复杂约束,传统算法在处理大规模不可行区域时容易陷入局部最优。约束多目标进化算法(CMOEAs)的关键在于约束处理策略。本文针对CMOPs的挑战,提出了一种基于分解的改进算法MOEA/D-ICDP,通过动态调整约束与目标的平衡,提升了算法在复杂环境下的性能。
2. 核心技术:改进约束支配原则(ICDP)
2.1 动态容差机制
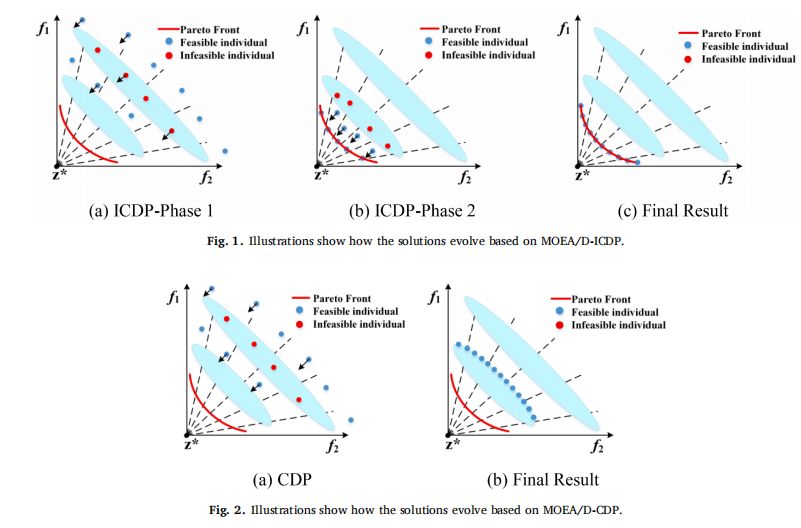
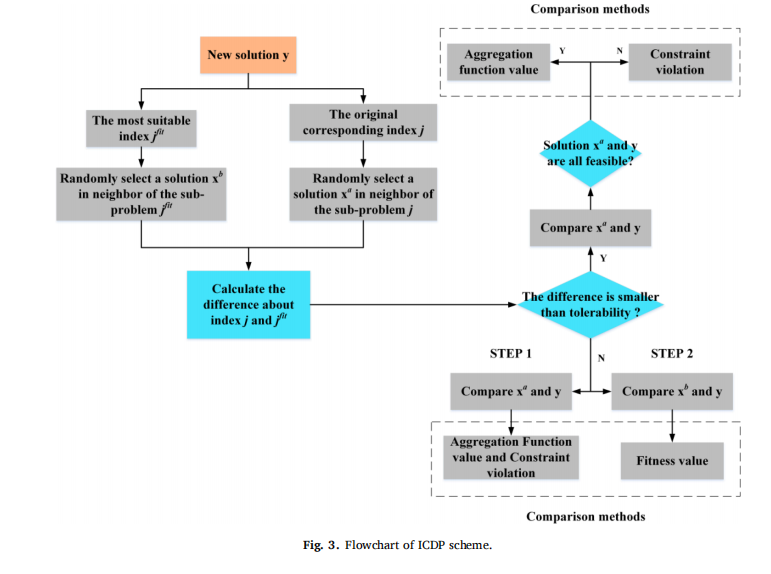
在传统约束支配原则(CDP)中,可行解默认优于不可行解,导致算法在不可行区域搜索能力不足。ICDP引入**动态容差(Tolerability)**来衡量解与最优权重向量的偏差:
Tolerability
=
{
(
e
5
⋅
gen
T
max
−
1
)
⋅
N
e
5
−
1
,
gen
≤
α
⋅
T
max
N
,
gen
>
α
⋅
T
max
\text{Tolerability} = \begin{cases} \frac{\left(e^{\frac{5 \cdot \text{gen}}{T_{\text{max}}}} - 1\right) \cdot N}{e^5 - 1}, & \text{gen} \leq \alpha \cdot T_{\text{max}} \\ N, & \text{gen} > \alpha \cdot T_{\text{max}} \end{cases}
Tolerability=⎩
⎨
⎧e5−1(eTmax5⋅gen−1)⋅N,N,gen≤α⋅Tmaxgen>α⋅Tmax
其中,gen为当前迭代次数,T_max为最大迭代次数,N为子问题数量,α为控制参数。容差随迭代指数增长,早期允许更多不可行解参与进化,后期聚焦于可行解。
2.2 适应度函数设计
为平衡约束违反和目标优化,ICDP定义了动态适应度函数:
fitness
=
d
f
⋅
g
Tchebycheff
+
(
1
−
d
f
)
⋅
ϕ
(
x
)
\text{fitness} = df \cdot g^{\text{Tchebycheff}} + (1 - df) \cdot \phi(x)
fitness=df⋅gTchebycheff+(1−df)⋅ϕ(x)
其中,df为动态因子,结合可行解比例和迭代次数动态调整:
d
f
=
p
f
⋅
(
1
−
e
(
5
⋅
gen
T
max
−
1
)
⋅
N
e
5
−
1
)
df = p_f \cdot \left(1 - \frac{e^{\left(\frac{5 \cdot \text{gen}}{T_{\text{max}}} - 1\right) \cdot N}}{e^5 - 1}\right)
df=pf⋅(1−e5−1e(Tmax5⋅gen−1)⋅N)
g^Tchebycheff为Tchebycheff聚合函数值,φ(x)为约束违反值。
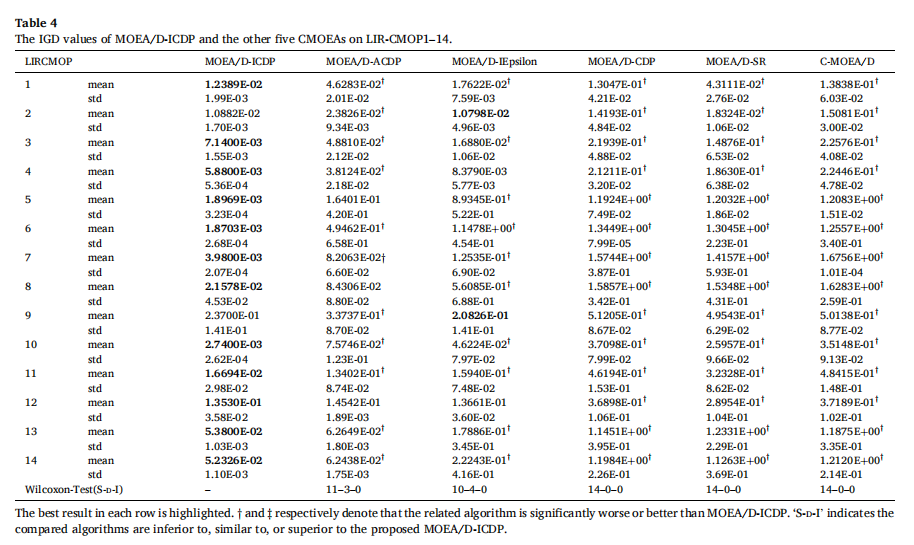
2.3 权重向量偏差处理
对于新生成解y,计算其与初始权重向量λ^j和最优权重向量λ^{j*}的偏差:
deviation
=
∣
j
−
j
∗
∣
\text{deviation} = |j - j^*|
deviation=∣j−j∗∣
根据偏差与容差的关系,选择不同的支配规则:
- 偏差 ≤ 容差:直接比较约束违反或目标值。
- 偏差 > 容差:结合适应度函数选择更优解。
3. MOEA/D-ICDP算法框架
3.1 算法流程
- 初始化:分解问题为子问题,生成初始种群。
- 迭代优化:
- 计算动态因子
df和容差。 - 生成新解
y,更新理想点。 - 根据偏差和容差,选择替换策略。
- 计算动态因子
- 外部存档维护:使用邻域距离(Vicinity Distance)修剪冗余解。
3.2 伪代码
Algorithm MOEA/D-ICDP:
Input: 问题参数, 种群大小N, 最大迭代T_max
Output: 非支配解集NS
初始化种群P,计算理想点z*
for gen in 1 to T_max:
计算df和Tolerability
for each子问题i:
生成新解y
更新理想点z*
计算偏差deviation
if deviation < Tolerability:
比较约束违反或目标值
else:
使用适应度函数比较
更新种群
非支配排序,维护外部存档
return NS
4. 实验与分析
4.1 测试集与指标
- 测试集:LIRCMOP(大规模不可行区域)、DASCMOP(多样性/可行性/收敛性挑战)、CF(小规模约束)。
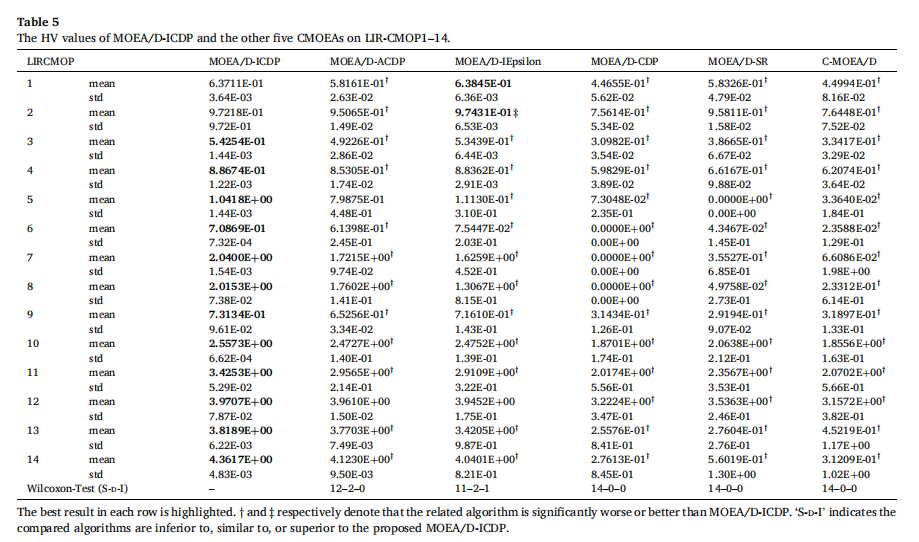
- 指标:IGD(反向世代距离)、HV(超体积)。
4.2 结果对比
4.3 关键结论
- LIRCMOP:MOEA/D-ICDP在14个测试问题中12次取得最优IGD,显著优于其他算法。
- DASCMOP:在多样性和收敛性挑战下表现稳定,但在强可行性约束下略逊。
- CF:在小规模约束问题中,MOEA/D-ICDP的HV值波动更小,稳定性更强。
5. 实际工程应用
5.1 弹簧设计问题
目标:最小化体积和剪切应力。MOEA/D-ICDP的HV值为0.46826,优于其他算法,表明其在机械设计中的潜力。
5.2 盘式制动器设计
目标:最小化制动时间和质量。MOEA/D-ICDP的HV值为0.75470,略低于MOEA/D-ACDP,但仍保持竞争力。
6. 结论与展望
MOEA/D-ICDP通过动态容差和适应度函数,有效平衡了约束与目标的优化,在大规模不可行区域问题中表现突出。未来可进一步研究参数自适应策略、等式约束处理及权重向量分布优化。
参考文献
[1] Gu Q, Bai J, Li X, et al. A constrained multi-objective evolutionary algorithm based on decomposition with improved constrained dominance principle[J]. Swarm and Evolutionary Computation, 2022, 75: 101162.

















 9553
9553

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









