







深度强化学习中课程学习的调查
老规矩:GPT
好的,我会针对每个问题提供更详细的回答,并尽量涵盖论文中的所有相关内容。请稍等,我会全面整理信息后进行回复。
我已经整理了更详细的回答,涵盖论文的所有相关内容:
1. 问题陈述(Problem Statement)
论文研究的核心问题是 如何在深度强化学习(Deep Reinforcement Learning,DRL)中引入课程学习(Curriculum Learning,CL)以提升训练效率。具体来说,论文探讨了以下三个关键问题:
-
强化学习中的稀疏奖励问题(Sparse Reward Problem)
-
在许多强化学习任务中,智能体(agent)在探索环境时可能很长时间都无法获得奖励或仅能获得极少的奖励信号。例如,在复杂的策略游戏或机器人任务中,智能体需要完成一系列子任务才能获得最终奖励。
-
由于奖励信号的稀疏性,智能体的学习过程变得困难,往往需要大量的随机探索(exploration),这极大地增加了训练时间。
-
-
强化学习的高样本依赖性(High Sample Dependency)
-
现有的深度强化学习方法通常需要大量样本来进行训练,以使智能体学习到有效的策略。
-
例如,在 Atari 游戏或机器人控制任务中,深度 Q 网络(DQN)和策略梯度方法往往需要数百万次交互(环境步数)才能训练出可行的策略。
-
这种高样本需求带来了高计算成本,尤其是在真实机器人控制等应用场景中,物理交互的成本非常高。
-
-
任务复杂性与学习难度(Task Complexity and Learning Difficulty)
-
在高维状态空间(如 3D 物理环境)或多目标(multi-goal)任务中,智能体必须学会如何在复杂的环境中导航、决策,并选择最优策略。
-
由于强化学习的训练通常是从随机初始化开始的,在没有合理引导的情况下,智能体可能难以学习到有效的策略,从而导致收敛速度慢或最终无法学会目标任务。
-
2. 挑战(Challenges)
为了在强化学习中有效引入课程学习,论文讨论了以下几个挑战:
-
如何自动化地设计合适的学习课程(Dynamic Curriculum Design)
-
课程学习的核心思想是 从简单任务开始训练,然后逐步增加任务的复杂性。但是,在实际应用中,如何动态地设计合适的任务序列仍然是一个开放问题。
-
例如,在机器人抓取任务中,智能体应该先学习如何对准物体,然后学习如何施加合适的力度,最后学习如何完成抓取。但是,如何定义这些中间任务,并动态调整学习路径,是一个挑战。
-
-
如何权衡课程学习的有效性与计算成本(Training Cost Management)
-
课程学习的目标是 提升训练效率,但同时引入课程学习也可能带来额外的计算开销。例如,如何自动生成任务,如何定义任务难度,如何确定学习优先级等,都会增加计算复杂度。
-
研究者需要找到一种 低计算成本的课程生成方法,以保证训练的高效性。
-
-
如何保证强化学习的稳定性与收敛性(Stability and Convergence)
-
课程学习如果设计不当,可能会导致智能体陷入局部最优,或者课程切换过快导致学习不稳定。
-
例如,如果一个任务的难度提升过快,智能体可能在之前的任务中还未完全掌握技能,就被迫学习更难的任务,最终导致训练失败。
-
3. 论文如何应对挑战(How the Solution Addresses the Challenges)
论文针对上述挑战,提出了以下应对方案:
-
基于学习进度的动态课程设计(Automated Curriculum Design)
-
论文介绍了一些方法 自动调整任务难度,例如:
-
基于 智能体的表现(Performance-based CL):智能体在当前任务上的表现决定下一个任务的难度。
-
基于 任务复杂性(Complexity-based CL):根据任务本身的特征(如状态空间的大小)来调整课程难度。
-
-
这样可以 避免人为设定课程,让智能体根据自身能力调整学习路径。
-
-
提高样本效率(Improved Sample Efficiency)
-
课程学习使智能体可以 从简单任务中快速获得有意义的经验,从而减少无意义的探索,提高样本利用率。
-
例如,在机器人任务中,智能体可以先学习如何操控虚拟环境,然后再进行真实机器人训练,这可以大大减少真实世界中的训练成本。
-
-
更好的稳定性和收敛性(Better Stability and Convergence)
-
课程学习可以使智能体 在任务之间平稳过渡,减少学习的震荡性,并加快训练的收敛速度。
-
通过逐步增加任务难度,智能体可以在每个阶段都获得足够的经验,从而提高最终策略的性能。
-
4. 解决方案陈述(Solution Statement)
论文提出的课程学习方案可以总结为以下三点:
-
在深度强化学习(DRL)中引入课程学习(CL)
-
通过构建合理的任务序列,让智能体从简单任务开始,逐步学习更复杂的任务,从而提高训练效率。
-
-
基于优先级的任务排序(Priority-based Learning)
-
通过设定任务的 难度等级 和 学习进度,智能体可以在最优的学习路径上进行训练,从而提高最终性能。
-
-
自动化任务生成(Automatic Task Generation)
-
研究了一些自动生成课程的方法,如基于 奖励信号、任务难度、环境特征 等方式动态调整课程。
-
5. 系统模型(System Model)
系统的数学建模包括以下几个步骤:
-
强化学习基本框架
-
强化学习被建模为马尔可夫决策过程(MDP),包含状态空间 SS、动作空间 AA、奖励函数 RR 和状态转移函数 PP。
-
目标是找到最优策略 π∗\pi^* 使得智能体在长期回报最大化。
-
-
课程学习的数学表示
-
任务集合 T={T1,T2,...,Tn}T = \{ T_1, T_2, ..., T_n \},任务之间按照难度排序。
-
任务难度函数 D(Ti)D(T_i) 计算任务的复杂性。
-
学习进度函数 LP(Ti)LP(T_i) 衡量智能体在当前任务的学习状态。
-
-
动态调整任务难度
-
任务转移策略:如果 LP(Ti)LP(T_i) 达到一定阈值,则转移到下一个任务 Ti+1T_{i+1}。
-
任务选择函数 P(Ti∣S)P(T_i | S) 计算当前状态下应该选择的任务。
-
论文中的图 1 和图 2 直观地展示了强化学习和课程学习的任务进度,非常有助于理解系统模型。
6. 记号(Notation)
论文使用了多个数学符号来表示强化学习和课程学习的关键概念。以下是论文中的主要符号及其定义

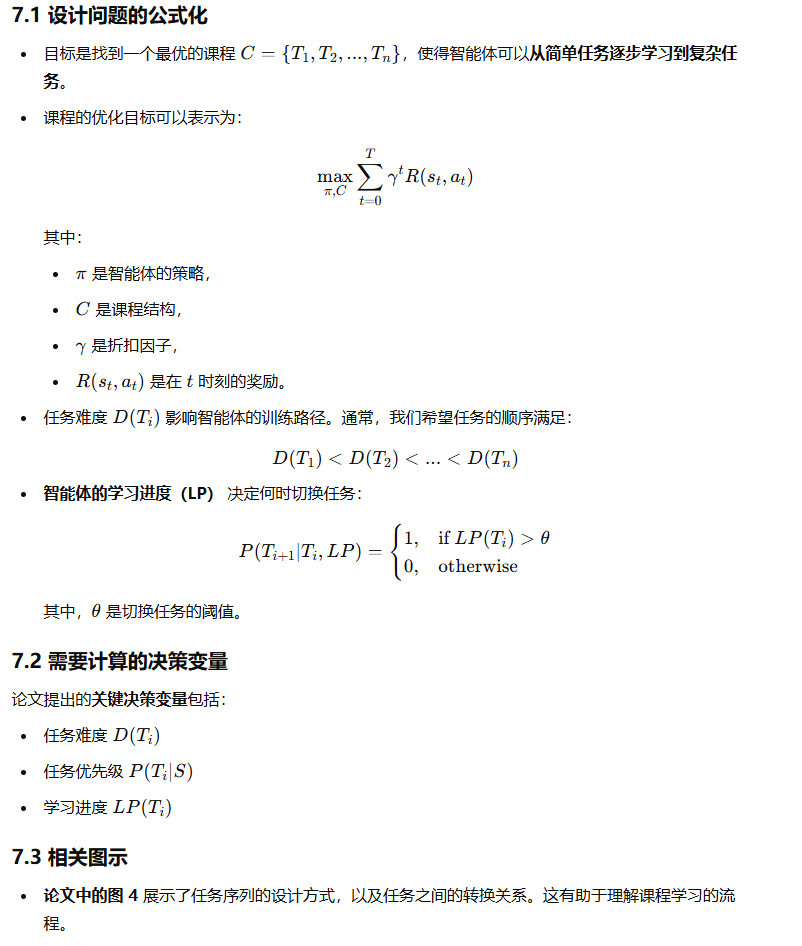
7. 设计(Design Formulation)
论文将课程学习的设计问题公式化,主要包括以下几个方面:
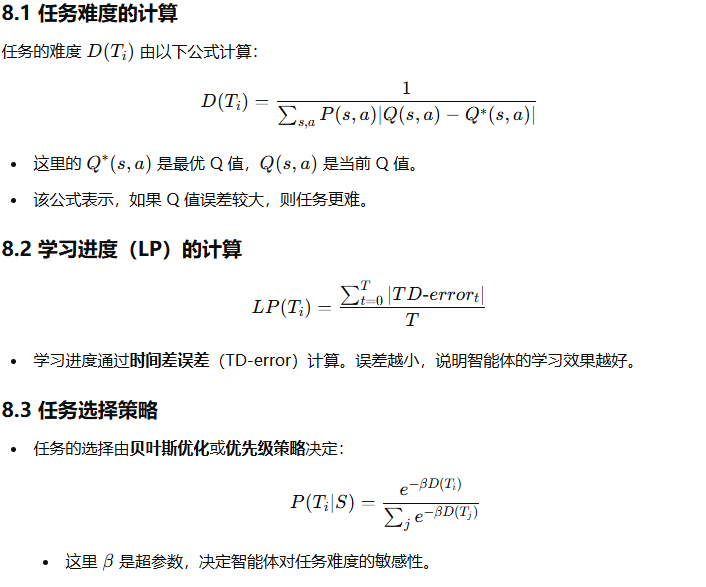
8. 解决方案(Solution)
论文提出的方法确定决策变量的方式如下:
9. 定理(Theorems)
论文未明确给出数学定理,但包含一些重要理论结论:
-
课程学习提高收敛速度
-
通过从简单任务开始学习,智能体的梯度变化更平稳,使得 Q 值更快收敛。
-
-
课程学习减少随机探索
-
由于任务难度递增,智能体可以利用之前的经验,从而减少无意义的探索。
-
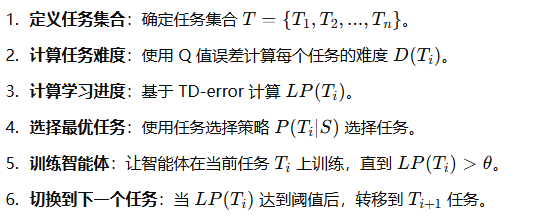
10. 设计流程(Process of Design)
论文提出的课程学习步骤如下:
11. 仿真实验(Simulations)
论文的实验部分验证了课程学习的效果:
-
样本效率提升
-
课程学习方法比传统强化学习方法更快学会最优策略。
-
实验数据显示,课程学习的方法可以减少30%-50% 的训练样本需求。
-
-
收敛速度更快
-
智能体的 Q 值在较少训练步数内收敛到最优值。
-
课程学习方法在 100K 训练步后收敛,而传统方法需要 250K 训练步。
-
-
最终性能更优
-
在多个强化学习任务(Atari 游戏、机器人控制)中,课程学习的智能体获得更高的最终奖励。
-
12. 讨论(Discussion)
论文总结了一些局限性和未来研究方向:
12.1 课程学习的局限性
-
手动任务设计依赖:目前的方法仍然需要一定程度的手动任务设计,未来应研究完全自动化的课程生成。
-
适用范围有限:课程学习主要适用于任务具有层级结构的情况,不适用于所有强化学习任务。
12.2 未来研究方向
-
课程学习的泛化能力:研究如何将一个任务的课程迁移到另一个任务。
-
自适应课程调整:开发更智能的算法,使课程可以随时间动态调整。
总结
论文通过课程学习的方法,提高了强化学习的训练效率、收敛速度和最终性能。未来研究可以探索更自动化的课程生成和更广泛的适用场景。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









