






 文章讲述了从使用Simulink搭建仿真模块转向使用脚本文件进行仿真的优势,特别是在代码移植和阅读直观性上的提升。作者通过示例展示了如何使用脚本文件进行PID控制器参数整定,利用传递函数和LSIM函数进行离散仿真,以及如何处理阶跃输入信号。这种方法允许更快地运行仿真并进行参数调整。
文章讲述了从使用Simulink搭建仿真模块转向使用脚本文件进行仿真的优势,特别是在代码移植和阅读直观性上的提升。作者通过示例展示了如何使用脚本文件进行PID控制器参数整定,利用传递函数和LSIM函数进行离散仿真,以及如何处理阶跃输入信号。这种方法允许更快地运行仿真并进行参数调整。
习惯了simulink搭建仿真模块进行仿真后,发现在代码移植和阅读直观性上不够好,正好最近在学智能优化算法整定参数,发现使用脚本文件可以更快运行。
使用脚本文件命令直接运行离散仿真环境:
kp=3
ki=2
kd=1
C=pid(kp,ki,kd)
G=tf(1,[1 2 1])
T=feedback(C*G,1)
t = 0:0.01:10;
u = ones(size(t));%%输入为阶跃输入
[y, ~] = lsim(T, u, t);
plot(t,y)
Lsim(传递函数名,输入信号量,时间)
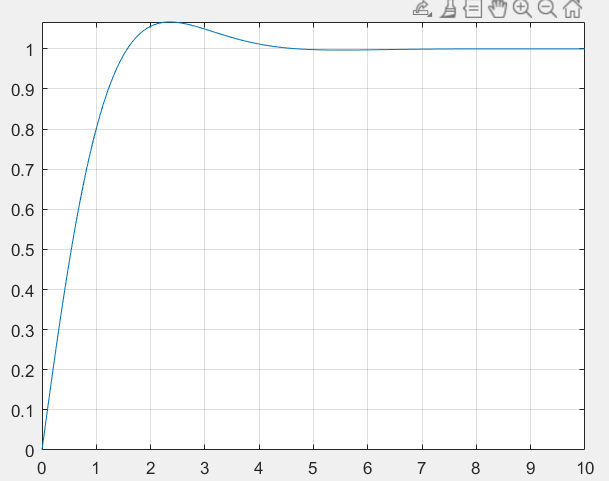
实际运行图,可以结合“递增值并运行节”进行参数整定。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









