






一、简介
本篇文章主要实现的是使用大疆遥控控制M3508电机匀速转动,笔者是个新手小白,最近做比赛用到大疆遥控和M3508电机,看了很多例程写的都挺复杂,大疆官网例程更是用上了FreeRTOS,这些太综合的资料笔者感觉不适于新手学习,无论是遥控还是3508电机的资料都有很多,但是二者结合起来用的还是比较少,所以笔者想的还是从简单写起,想和大家一起学习进步,有什么问题或者建议都欢迎各位大佬提出。(本篇文章有部分都是参考了其他大佬的,笔者会在相应的地方贴出,如果大佬本人介意的话,请及时联系笔者删除)
二、描述
硬件描述:大疆A板*1,M3508电机*1,C620电调*1,中心板*1,大疆遥控(带DR16接收器),24v电源*1,紧急开关*1.
软件描述:遥控器方面使用的是官方的dbus协议,利用DMA和串口进行通讯;电调使用的是CAN通讯;CUBEMX配置基础程序;
三、CUBEMX配置:(参考了其他大佬的 https://blog.youkuaiyun.com/weixin_43361652/article/details/118770662)
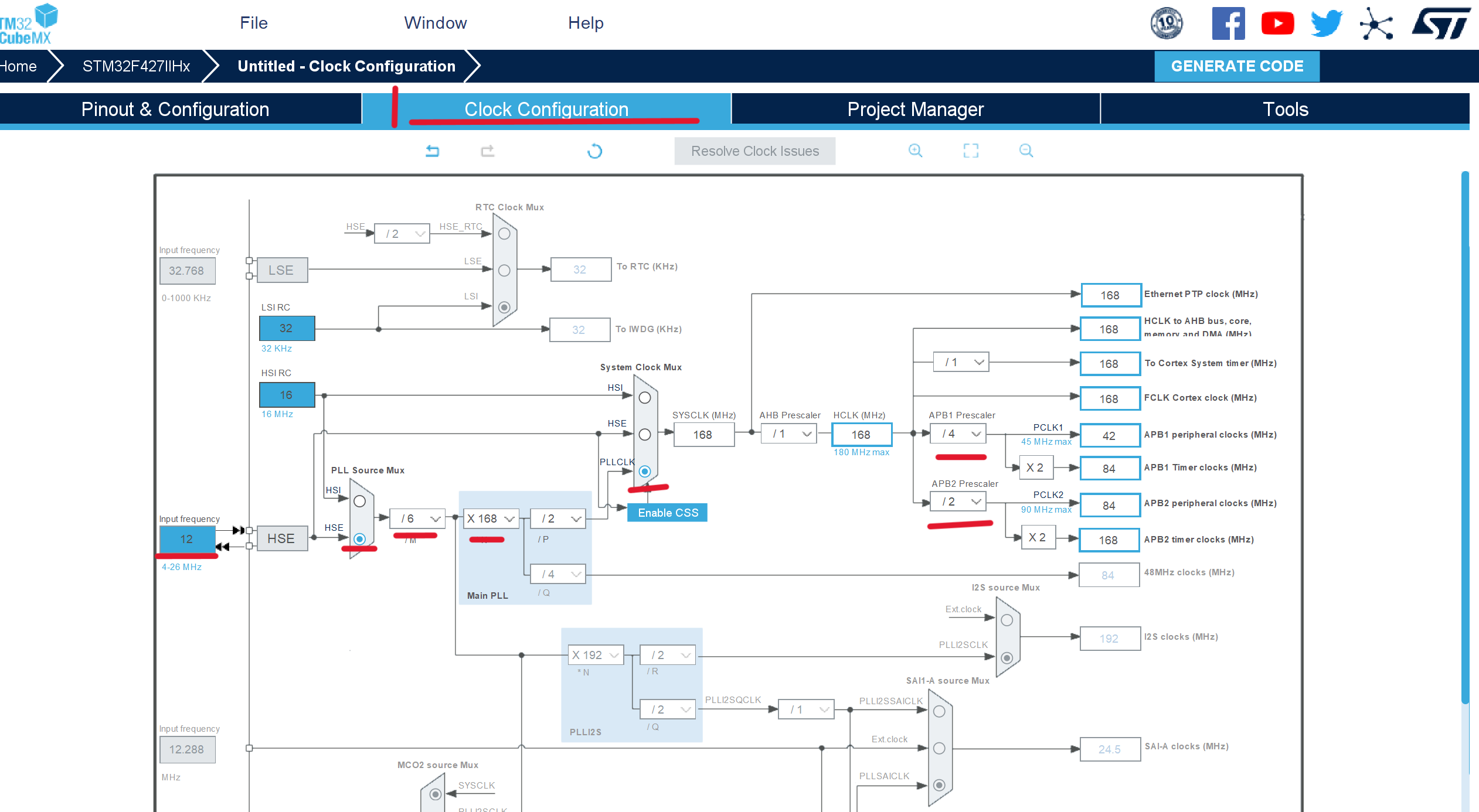
1.时钟树配置
2.配置CAN1
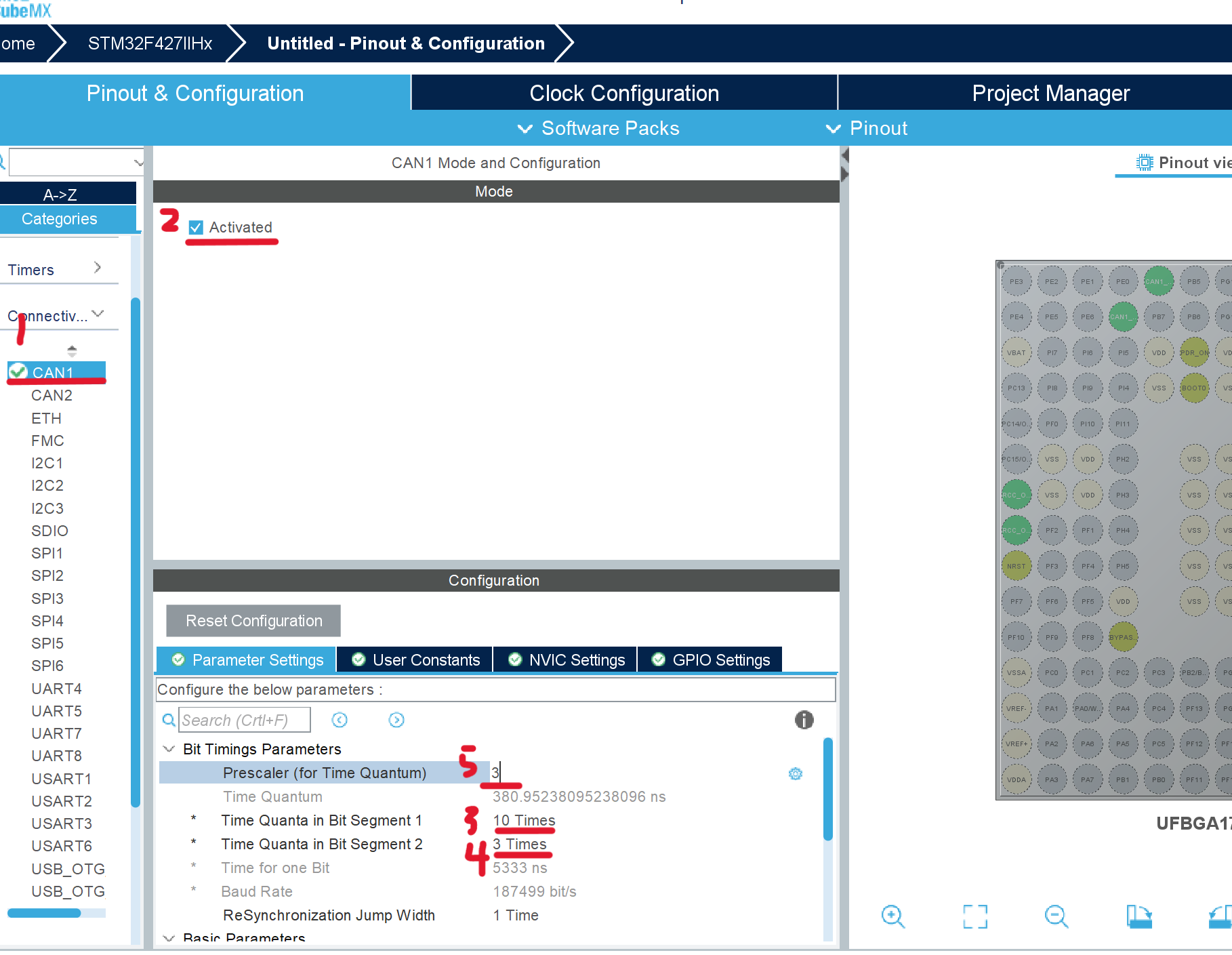
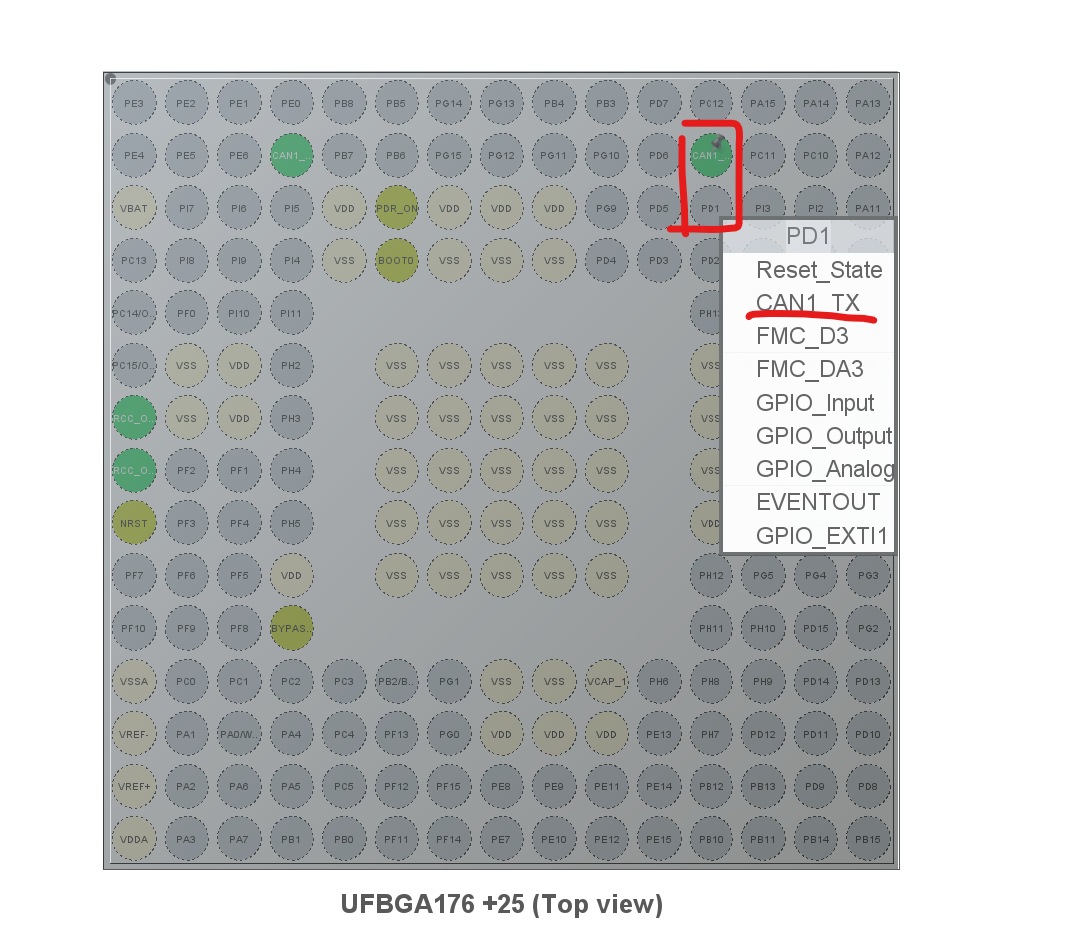
(注意这里复用了PD1和PD0作为CAN1的收发,A板的原理图上可以找到)
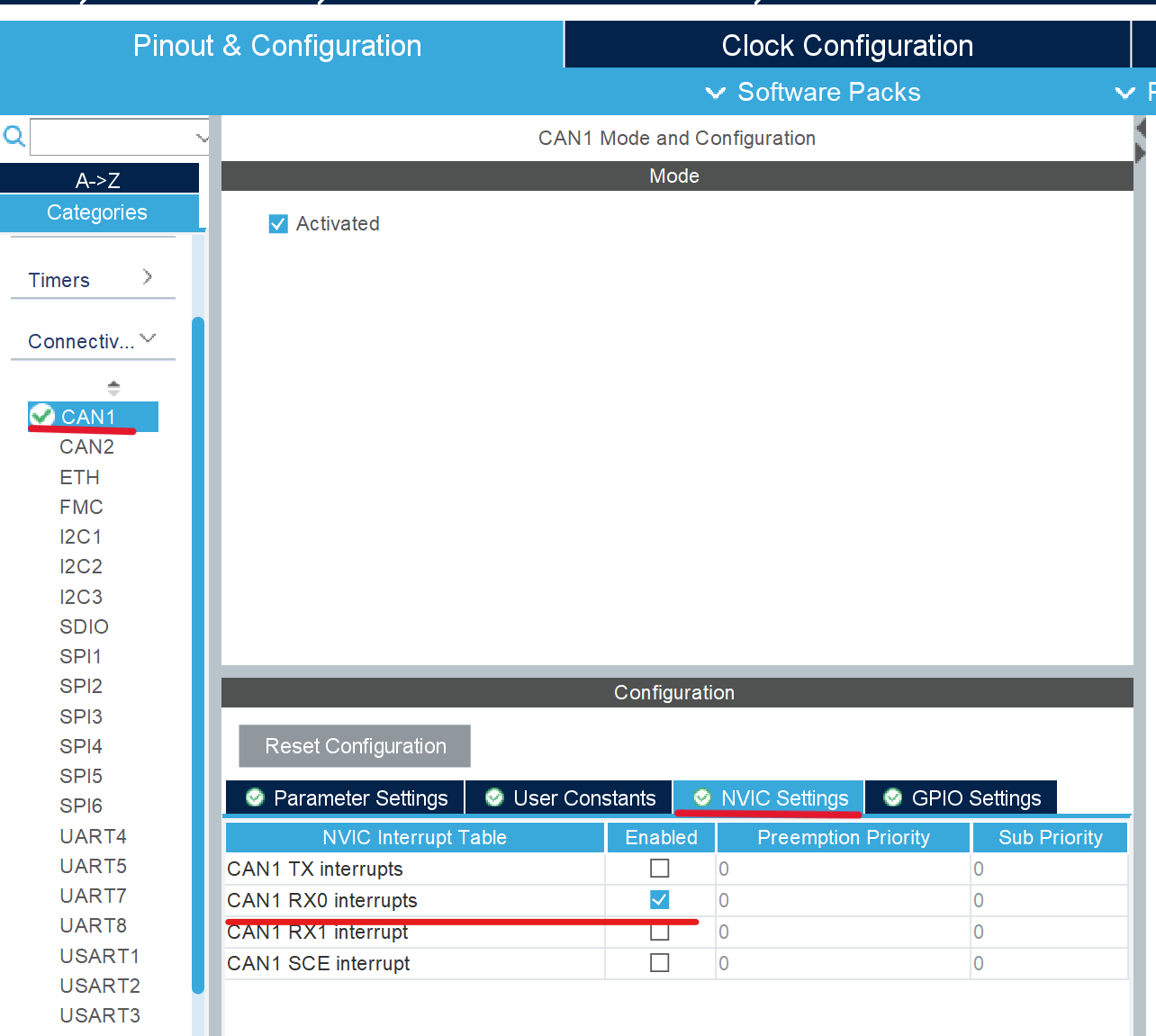
(后续要使用FIFO0,所以这里开启RX0,用FIFO1的就开RX1)
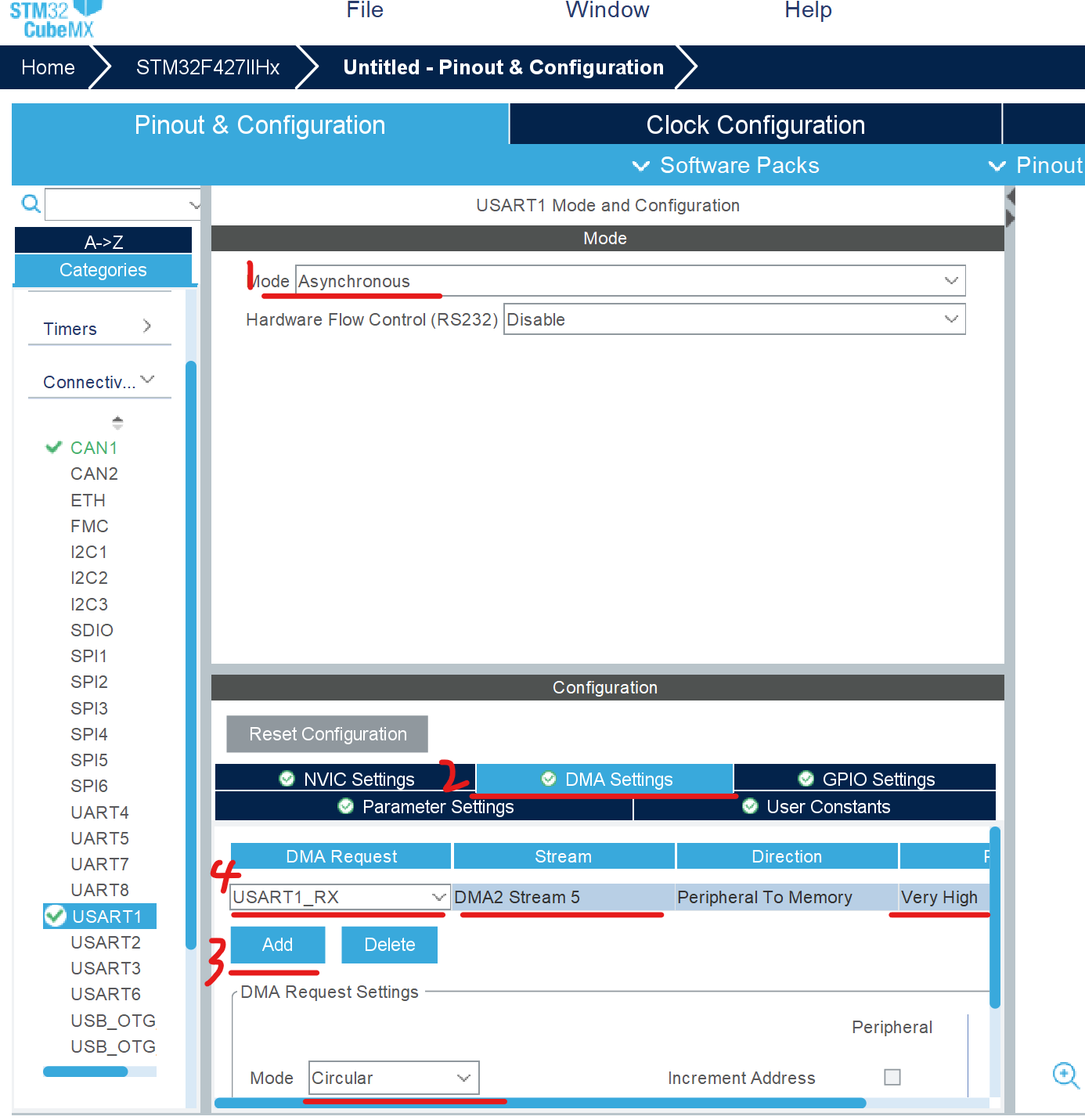
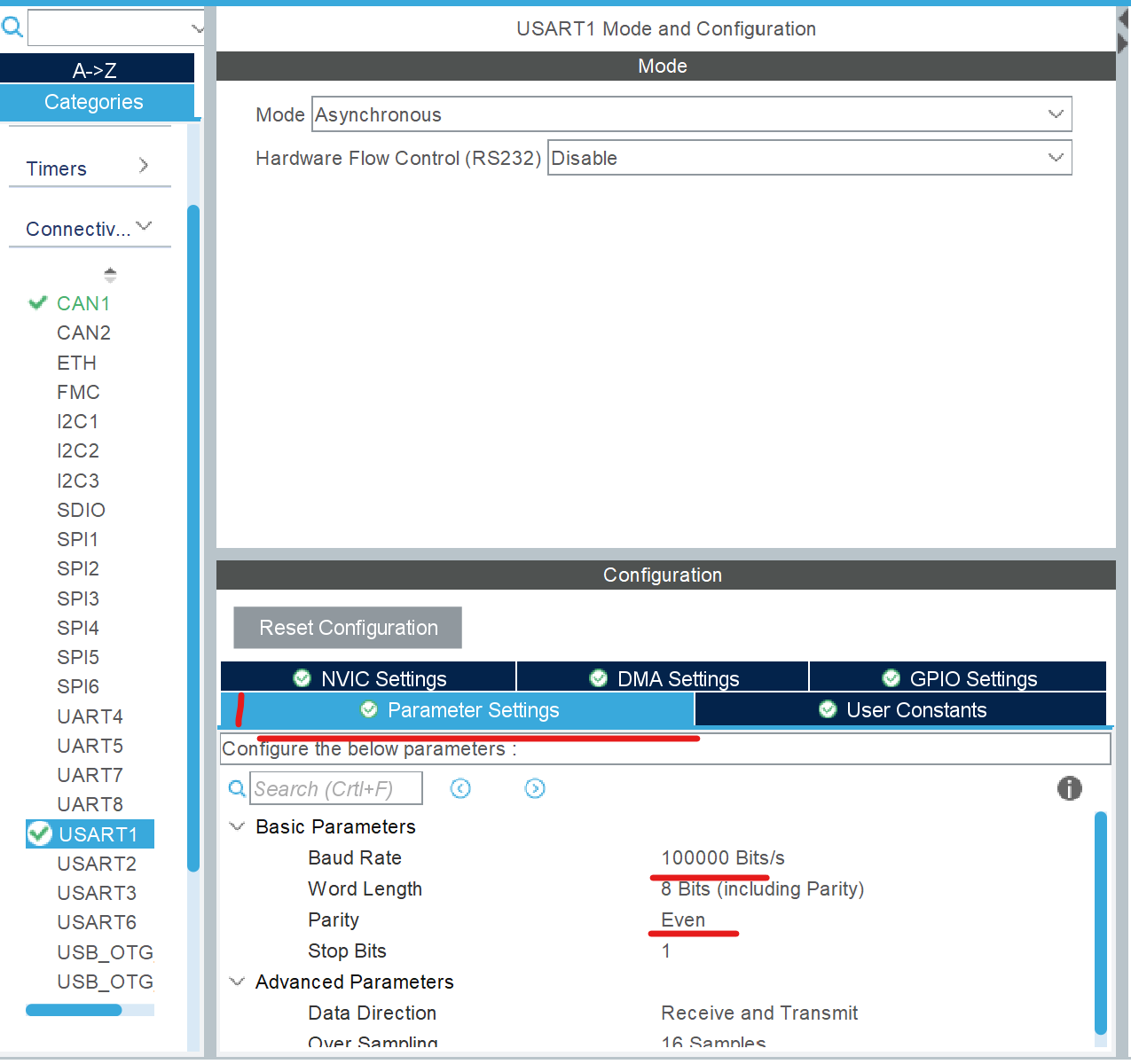
配置串口1(作为DMA的接收)
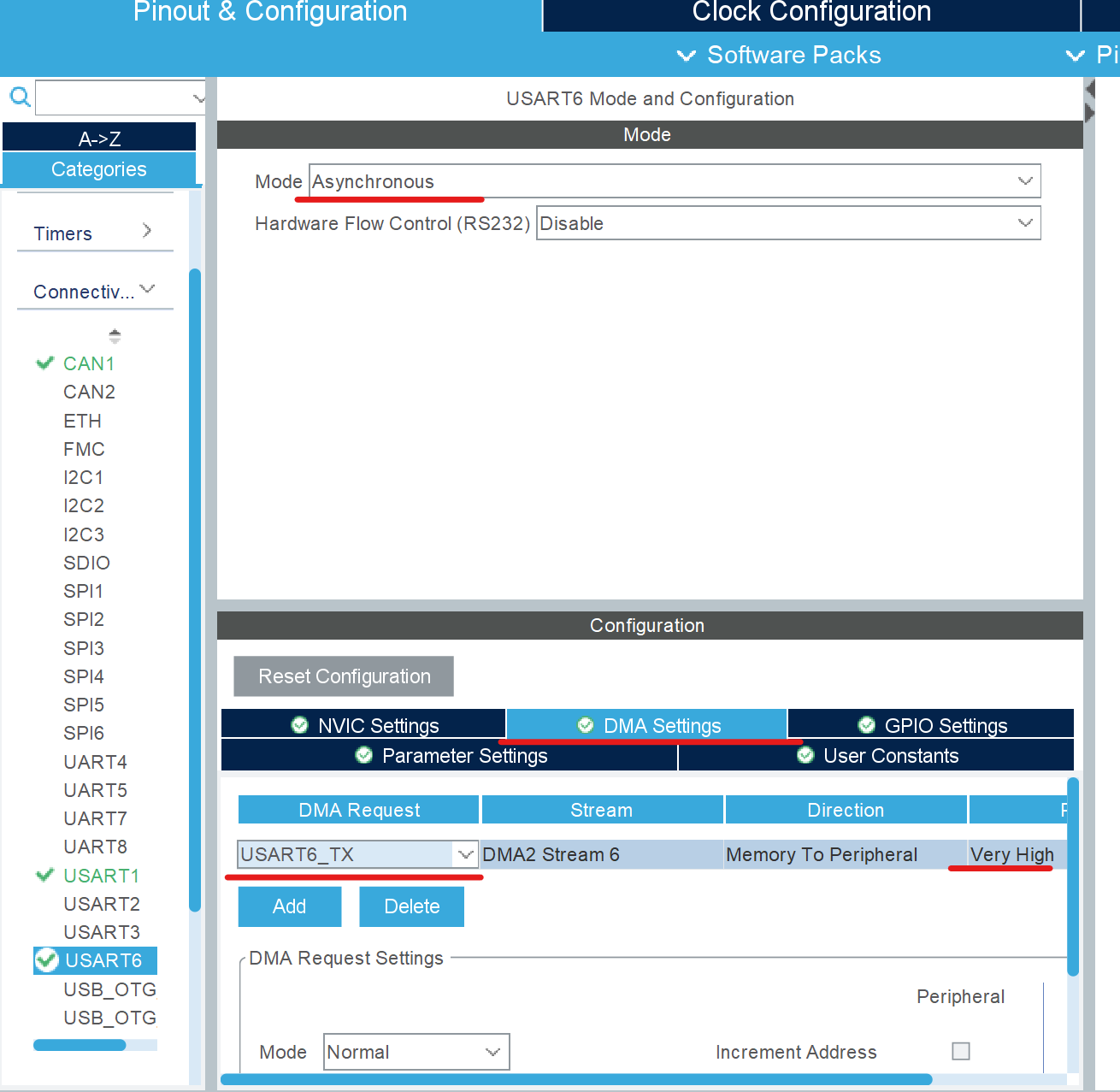
配置串口6(作为DMA的发送)
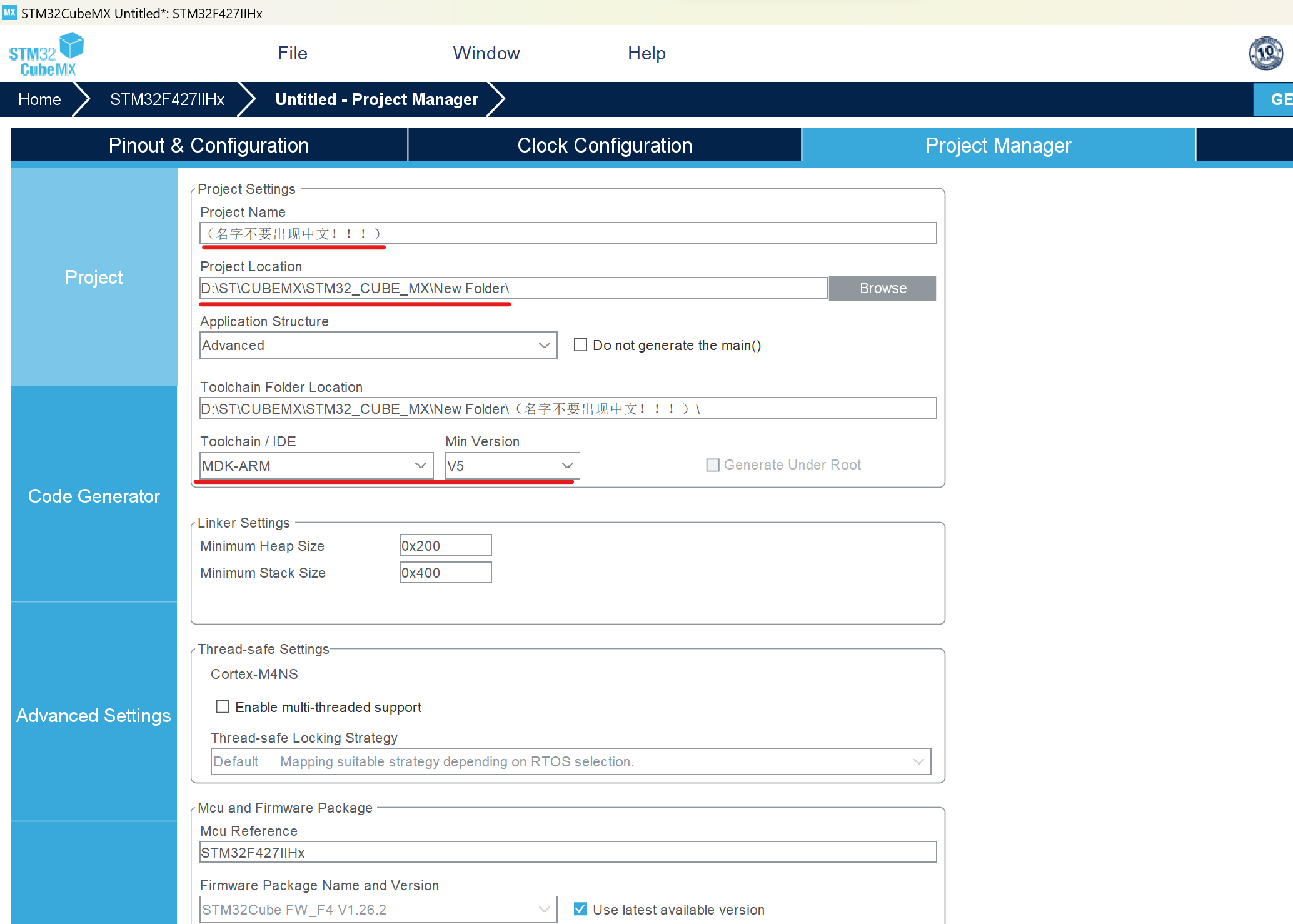
然后就差不多配置好了,剩下的就是这个项目工程的配置
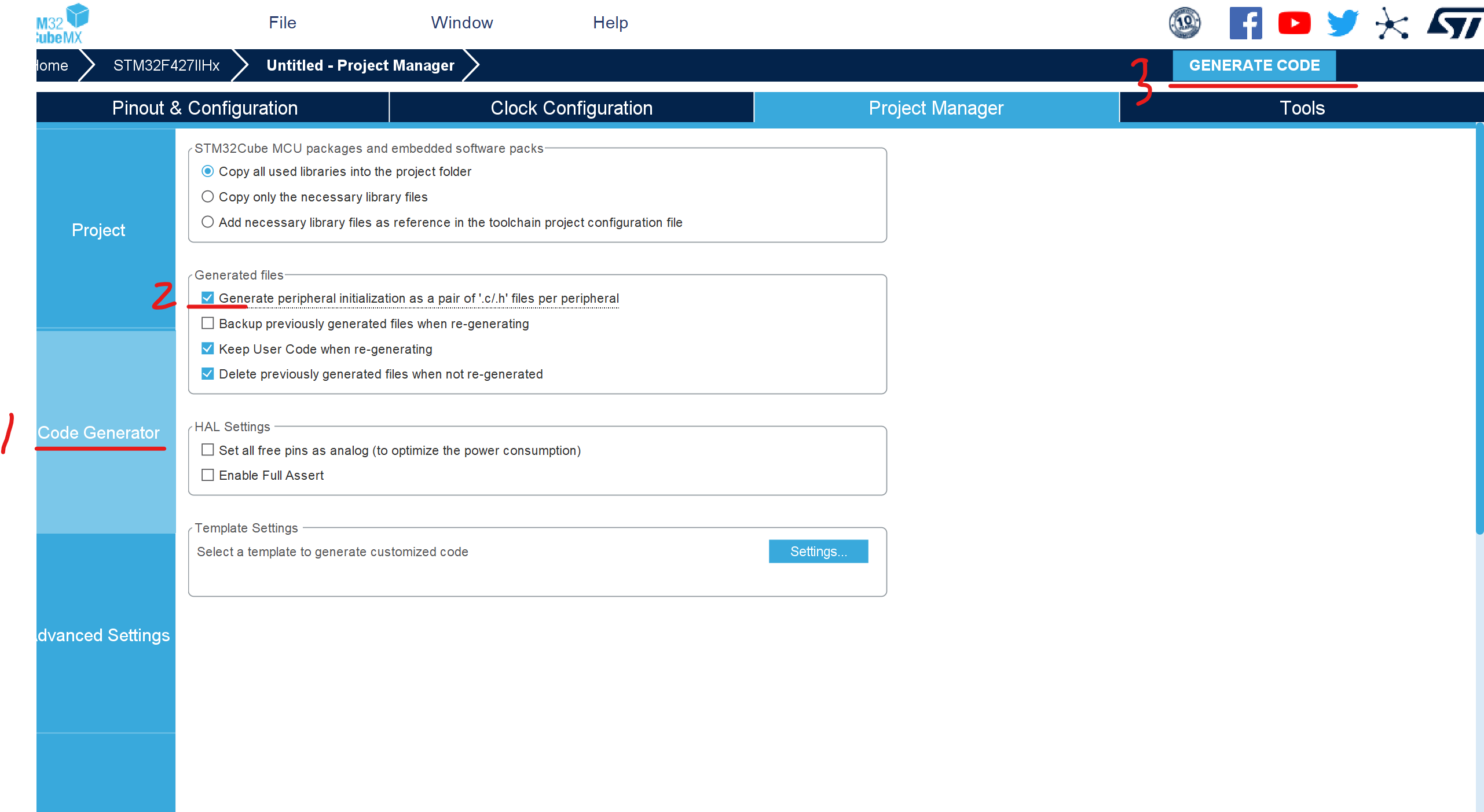
到这里就已经搭配好咱们需要的环境和基础的配置了,剩下的就在keil中完成吧,笔者最近在准备比赛,时间有点紧,剩下的会尽快补上。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









