







在这个项目中最重要的是理解多线程操作 这样主函数编写上就会简单很多,主函数看起来就不会太乱。
enum
{
PASS_STATE,
WAIT_STATE
}; // 枚举 来定义状态 代替复杂的定义define
在task.c文件中有四个函数
void systick_isr(void); //这个函数无需调用,是因为在系统中自带调用,可直接执行,执行的逻辑是每1ms 系统中断一次 执行一次void systick_isr(void)这个函数 ,因此可以看到在此函数中延时函数可用if (led1_task_cnt<1000) led1_task_cnt++; 形如这样的if语句来实现延时。在这个函数中要完成状态的编写 以及这个状态下要完成的事情 当然 状态间的转换也是要在这个部分完成的。具体状态机如下
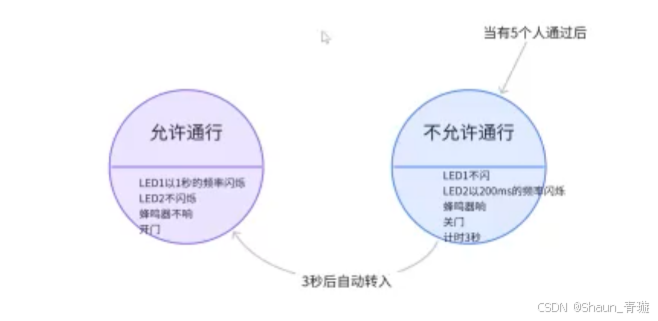
可以很清晰的看到有两个状态(允许通行 不允许通行的状态,那么需要用if 和if else 进入到不同的状态) 在每个状态下编写需要完成的事件 中断(在此项目中是红外传感器)一般是要单独放在一个线程里的
void led1_task(void);
管控灯1翻转的函数 设置标志位方方便 更改 调用 切记 标致位置FALSE
void led2_task(void);
管控灯1翻转的函数 设置标志位方方便 更改 调用 切记 标致位置FALSE
void sensor_task(void);
该函数主要是红外传感器中断 可以画一个流程图分析 也是两个if判断条件 在这里sprintf函数是sprintf(message,"PASS... %02d/05",passenger); 将PASS... %02d/05赋到message里 方便后面LCD1602调用
在这里特别强调LCD1602的刷新机制 是覆盖制 即覆盖之前的字符串 如果前面字符串长后面字符串短 则可能会显示出错 因此最好的办法就是每次调用LCD1602输出函数时都要清空 例如:lcd1602_show_line(1, 1, " "); 16个空格
以下位task.c代码
#include "task.h"
#include "stdint.h"
#include "led.h"
#include "beep.h"
#include "exti.h"
#include "gate.h"
#include "lcd1602.h"
#include "delay.h"
#include "stdio.h"
enum
{
PASS_STATE,
WAIT_STATE
}; // 枚举 来定义状态
uint32_t led1_task_cnt = 0;
uint32_t led2_task_cnt = 0;
uint32_t wait_cnt=0;
uint32_t passenger = 0;
uint8_t led1_task_flag =0;
uint8_t led2_task_flag =0;
uint8_t state= PASS_STATE;
char message[16] = {0};
void systick_isr(void)
{
//如果属于允许通行的状态
if(state == PASS_STATE)
{
//LCD来显示状态
//lcd1602_show_line(1,2,"PASS...");
//LED1以1s的频率闪烁
if (led1_task_cnt<1000)
led1_task_cnt++;
else
{
led1_task_flag=1;
led1_task_cnt=0;
}
//LED2不闪烁
led2_off();
//蜂鸣器不响
beep_off();
//开闸门
gate_off();
}
//如果属于不允许通行的状态
else if (state == WAIT_STATE)
{
//LED1不闪烁
led1_off();
//LED2以200ms的频率闪烁
if (led2_task_cnt<200)
led2_task_cnt++;
else
{
led2_task_flag=1;
led2_task_cnt=0;
}
//蜂鸣器响
beep_on();
//关门
gate_on();
//计时3s,之后
//delay_ms(3000);
if(wait_cnt<3000)
wait_cnt++;
else
{
wait_cnt=0;
//进入允许通行的状态
state=PASS_STATE;
//使用LCD来显示状态
lcd1602_show_line(1, 1, " ");
lcd1602_show_line(1,2,"PASS...");
}
}
}
void led1_task(void)
{
if(led1_task_flag == 0)
return;
led1_task_flag =0;
led1_toggle();
}
void led2_task(void)
{
if(led2_task_flag == 0)
return;
led2_task_flag =0;
led2_toggle();
}
void sensor_task(void)
{
//如果检测到有人通过
if(ia_flag_get() == TRUE && state== PASS_STATE)
{
//计数加1
passenger++;
//LCD显示状态 人数也要显示
sprintf(message,"PASS... %02d/05",passenger);
lcd1602_show_line(1,2,message);
ia_flag_set(FALSE);
}
//如果通过的人数超过5个
if (passenger >= 5)
{
//计数清0
passenger = 0;
//进入不允许通行的状态
state = WAIT_STATE;
//LCD显示状态
lcd1602_show_line(1,2,"WAIT... 00/05");
}
}以下为主函数代码
#include "sys.h"
#include "delay.h"
#include "led.h"
#include "task.h"
#include "beep.h"
#include "exti.h"
#include "gate.h"
#include "lcd1602.h"
int main(void)
{
HAL_Init(); /* 初始化HAL库 */
stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */
led_init();
gate_init();
beep_init();
exti_init();
lcd1602_init();
lcd1602_show_line(1,2,"PASS...");
while(1)
{
led1_task();
led2_task();
sensor_task();
}
}


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









