






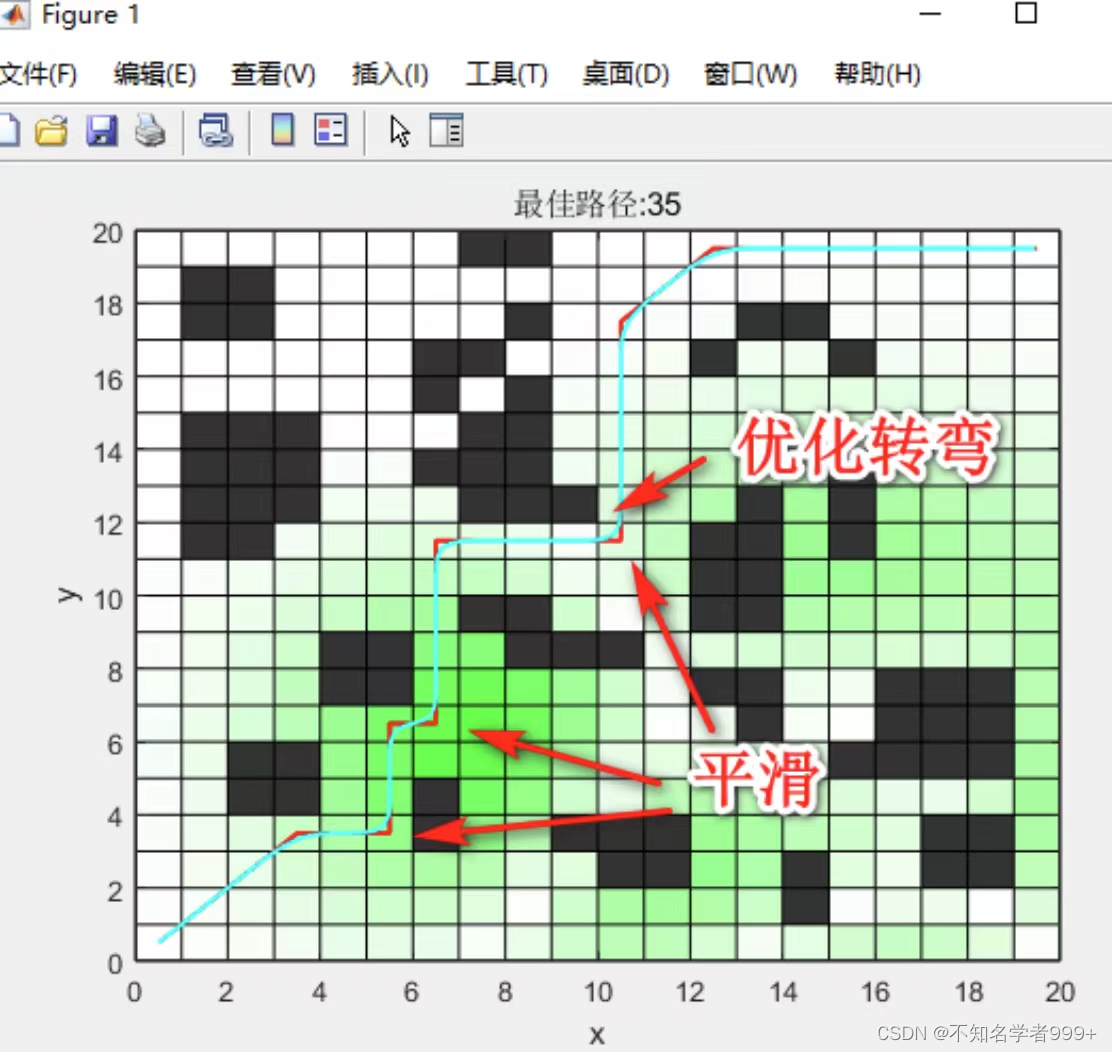
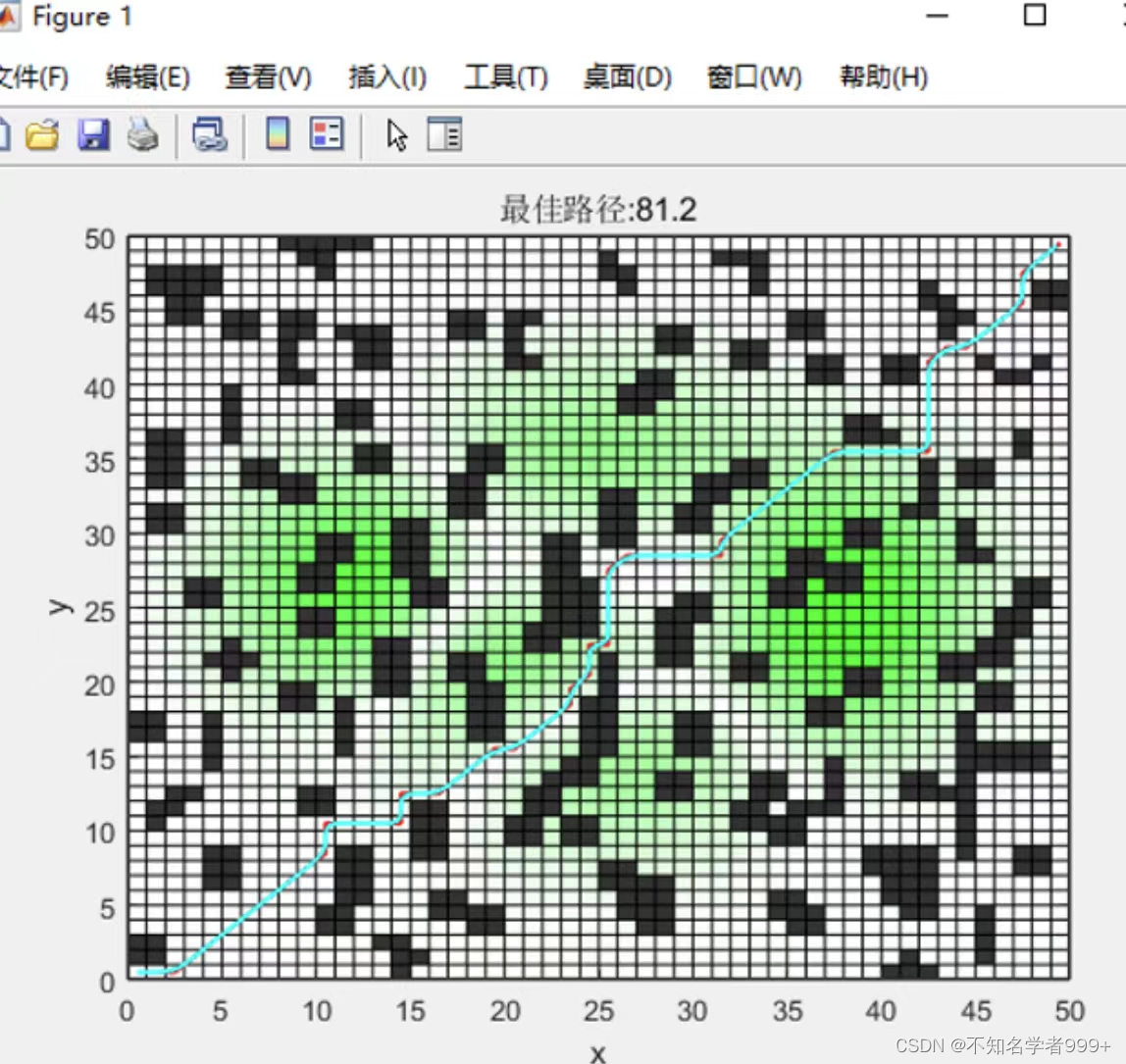
改进蚁群优化算法路径规划问题,具体改进之处如下。您仍然可接着优化!+赠送原始蚁群算法路径规划程序!+20*20和50*50两张地图。
1.最大最小蚂蚁思想
2.自适应挥发因子
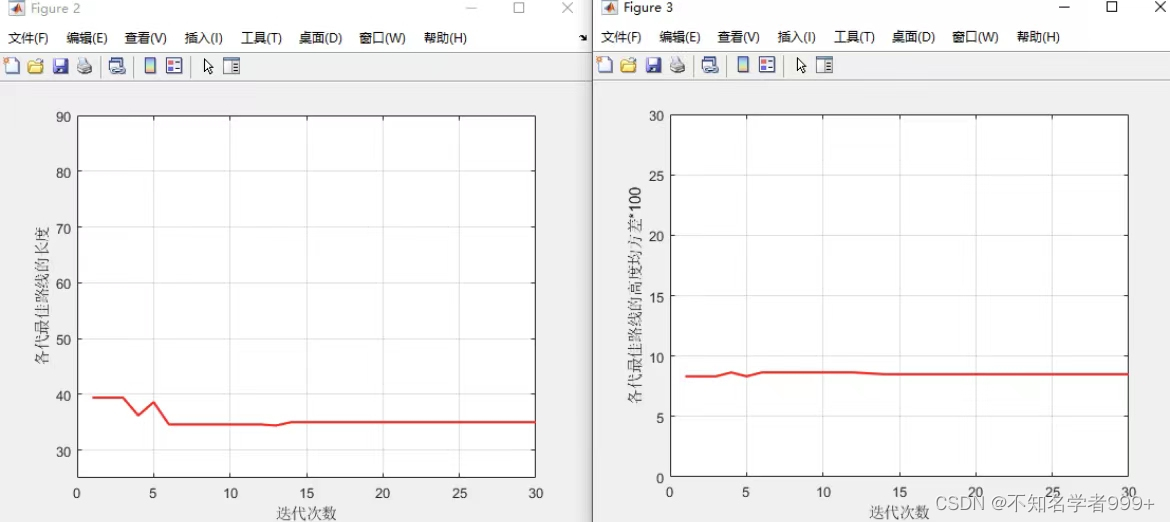
3.考虑高度均方差
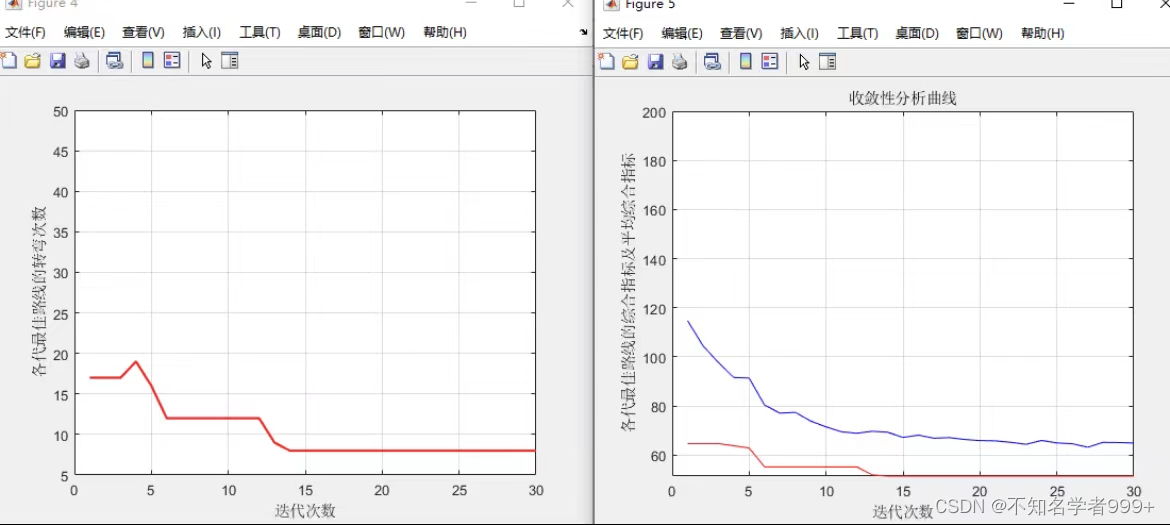
3.考虑转弯次数
4.考虑最短路径
5.考虑平均综合指标
6.3次B样条曲线平滑
对蚁群算法路径规划很有帮助,可自行二次优化
改进蚁群优化算法路径规划问题,具体改进之处如下。您仍然可接着优化!+赠送原始蚁群算法路径规划程序!+20*20和50*50两张地图。
1.最大最小蚂蚁思想
2.自适应挥发因子
3.考虑高度均方差
3.考虑转弯次数
4.考虑最短路径
5.考虑平均综合指标
6.3次B样条曲线平滑
对蚁群算法路径规划很有帮助,可自行二次优化
 495
495

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 https://mbd.pub/o/bread/mbd-ZJmZlJpu
https://mbd.pub/o/bread/mbd-ZJmZlJpu





















