







 超级会员免费看
超级会员免费看
- 实验目的和任务
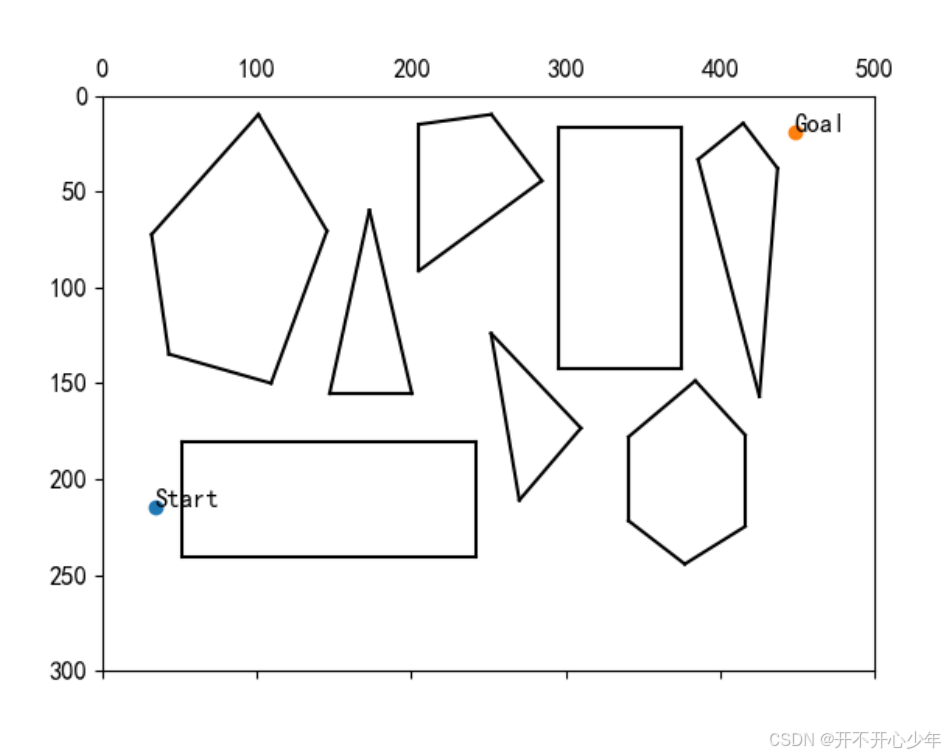
图1.1展示了机器人导航问题的地图。在此图中,机器人需要从起点Start出发,搜索并到达目标点Goal。图中存在一些凸多边形障碍物,我们需要设计一种算法来寻找从Start点到Goal点的最短路径。
matplotlibdraw.py
# cv2 是 OpenCV(Open Source Computer Vision Library)的 Python 接口。OpenCV 是一个开源的计算机视觉和机器学习软件库,包含了多种常见的视觉处理功能,如图像处理、视频分析、特征提取、物体检测等。cv2 库提供了大量的图像和视频处理函数,使得我们可以方便地进行图像处理和计算机视觉编程。
import cv2
# matplotlib 是一个用于创建静态、动态、交互式可视化的 Python 库。pyplot 是 matplotli
 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









