







 超级会员免费看
超级会员免费看
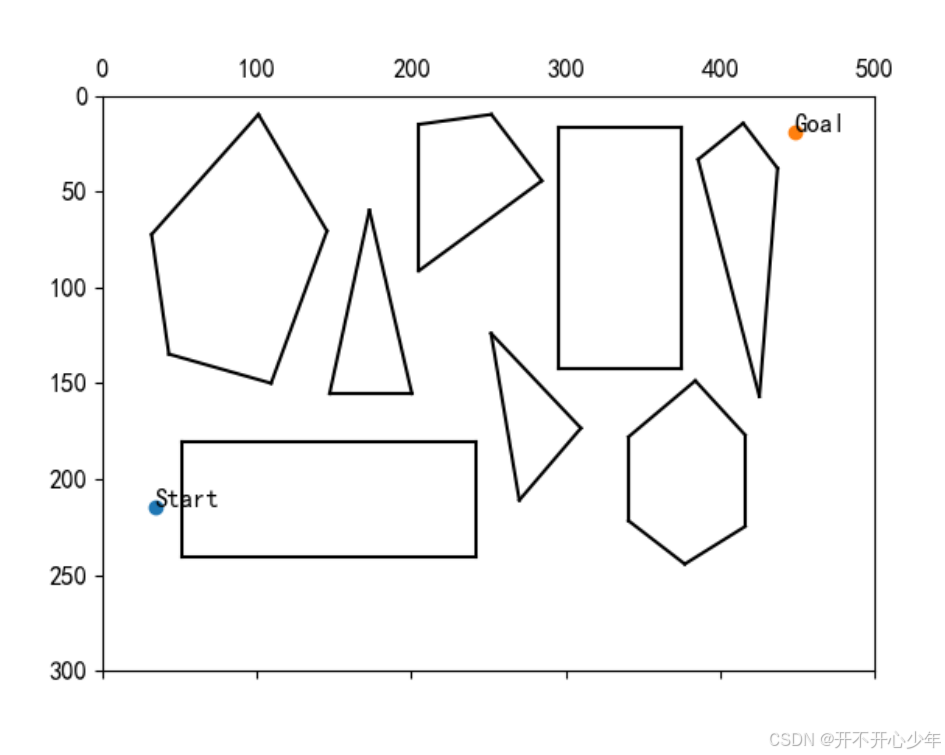
- 实验目的和任务
图1.1展示了机器人导航问题的地图。在此图中,机器人需要从起点Start出发,搜索并到达目标点Goal。图中存在一些凸多边形障碍物,我们需要设计一种算法来寻找从Start点到Goal点的最短路径。
vertices.txt
215 34 0
180 50 1
180 243 2
242 243 3
242 50 4
122 250 5
175 310 6
213 270 7
149 385 8
178 417 9
226 417 10
246 378 11
223 341 12
179 341 13
10 100 14
71 146 15
152 109 16
136 42 17
73 31 18
60 173 19
157 201 20
157 146 21
15 204 22
7 251 23
45 285 24
93 204 25
17 295 26
17 376 27
1
 订阅专栏 解锁全文
订阅专栏 解锁全文


















 2769
2769

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









