







 本文介绍了如何在Ubuntu18.04系统中安装和测试SlmatecA1激光雷达,包括使用ROS的rplidarROS包进行节点启动和可视化。同时,详细阐述了修改Cartographer参数的步骤,如更新revo_lds.lua和demo_revo_lds.launch文件,以及如何重新编译和运行Cartographerdemo。
本文介绍了如何在Ubuntu18.04系统中安装和测试SlmatecA1激光雷达,包括使用ROS的rplidarROS包进行节点启动和可视化。同时,详细阐述了修改Cartographer参数的步骤,如更新revo_lds.lua和demo_revo_lds.launch文件,以及如何重新编译和运行Cartographerdemo。
1.安装SlmatecA1激光雷达
参考链接:【很详细】激光雷达初体验 - Ubuntu 18.04 + 思岚科技 RPLIDAR A1M8 + ROS 上手使用_银时大魔王的博客-优快云博客
测试指令:
//Run rplidar node and view in the rviz
roslaunch rplidar_ros view_rplidar.launch (for RPLIDAR A1/A2)
//Run rplidar node and view using test application
roslaunch rplidar_ros rplidar.launch (for RPLIDAR A1/A2)测试:
终端1:
sudo chmod 777 /dev/ttyUSB0终端2:在下载代码的工作空间内,先source,然后选择上述测试指令
//例如
roslaunch rplidar_ros view_rplidar.launch 2.修改cartographer参数
2.1修改revo_lds.lua [~/car2_ws/src/cartographer_ros/cartographer_ros/configuration_files下]
修改内容:将horizontal_laser_link 修改为 laser
tracking_frame = "horizontal_laser_link",
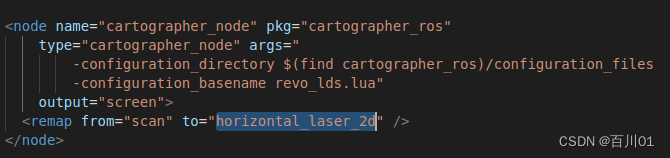
published_frame = "horizontal_laser_link",2.2 修改demo_revo_lds.launch[~/car2_ws/src/cartographer_ros/cartographer_ros/launch下】
1.在节点cartographer_node中 将horizontal_lawe_2d改为scan
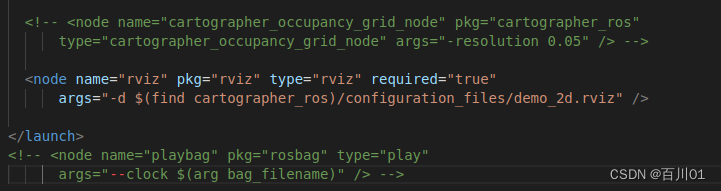
2.删除两个节点 【不要注释,不然运行该launch文件会报错】
3.退回,重新编译cartographer
catkin_make_isolated --install --use-ninja
source install_isolated/setup.bash4.测试:
运行激光雷达:
终端1:
sudo chmod 777 /dev/ttyUSB0终端2:
roslaunch rplidar_ros rplidar.launch运行cartographer demo
roslaunch cartographer_ros demo_revo_lds.launch
















 351
351

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









