







pip install pybind11pip install .发现没有安装pybind11:
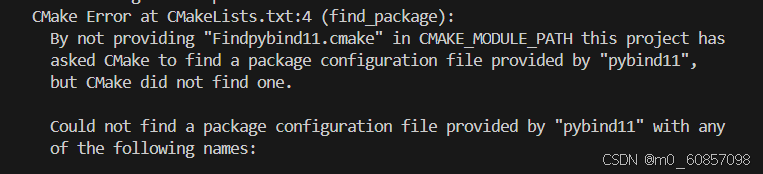
安装pybind11:(Ubuntu pybind11教程_ubuntu 编译pybind11 源码-优快云博客)
a.先下载pybind11的源代码:https://github.com/pybind/pybind11

2)编译安装
(pybind11的安装以及库的使用(ubuntu20.14)_ubuntu安装pybind11-优快云博客)
cd pybind11
mkdir build
cd build
cmake ..
make check -j 4
sudo make install #(如果使用python2需要禁用/usr/bin/下的python3)
在这里检查pybind11是否有安装好:

再pip install . 这次是没有opencv:
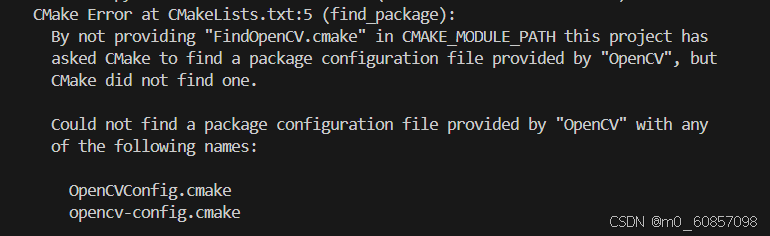
检查opencv是否安装:pkg-config --modversion opencv

没有装opencv
安装opencv:(https://zhuanlan.zhihu.com/p/647779108)
sudo apt-get install libopencv-dev
再pip install .

再装boost (在Ubuntu上安装Boost的五种方法(全网最全,建议收藏)_ubuntu安装boost-优快云博客)
sudo apt-get install libboost-all-dev 再pip install . 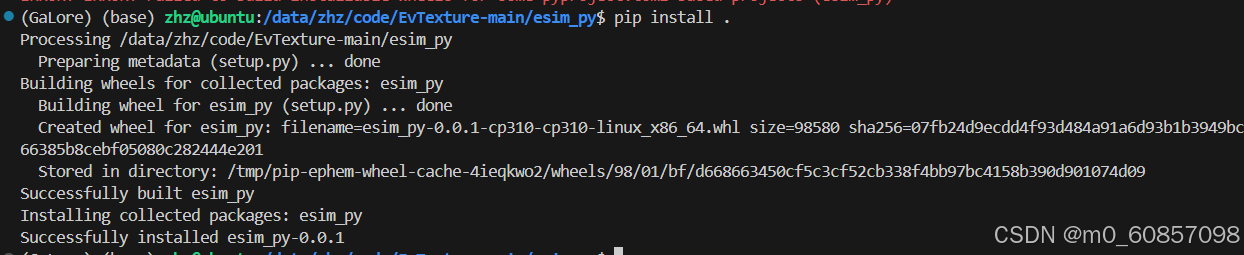
这次终于成功了
![]()
然后要生成timestamps.txt
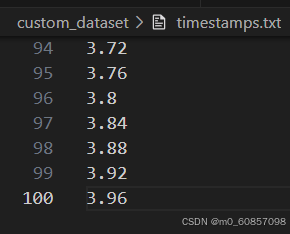
0.04秒的间隔。
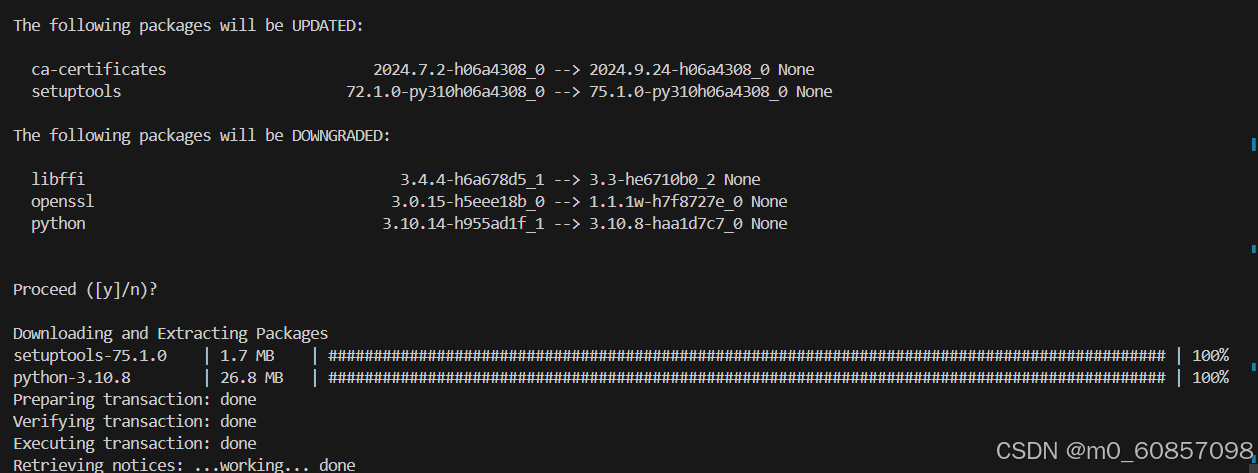
降低libffi的版本:(源码编译、安装libffi_libffi源码-优快云博客)
conda install libffi==3.3
生成.h文件
运行python ./02_event_packagers.py
from abc import ABCMeta, abstractmethod
import h5py
import cv2 as cv
import numpy as np
import torch
import bisect
import math
import random
import esim_py
import cv2
import os
def events_to_voxel_torch(xs, ys, ts, ps, B, device=None, sensor_size=(180, 240), temporal_bilinear=True):
"""
Turn set of events to a voxel grid tensor, using temporal bilinear interpolation
@param xs List of event x coordinates (torch tensor)
@param ys List of event y coordinates (torch tensor)
@param ts List of event timestamps (torch tensor)
@param ps List of event polarities (torch tensor)
@param B Number of bins in output voxel grids (int)
@param device Device to put voxel grid. If left empty, same device as events
@param sensor_size The size of the event sensor/output voxels
@param temporal_bilinear Whether the events should be naively
accumulated to the voxels (faster), or properly
temporally distributed
@returns Voxel of the events between t0 and t1
"""
if device is None:
device = xs.device
assert(len(xs)==len(ys) and len(ys)==len(ts) and len(ts)==len(ps))
bins = []
dt = ts[-1]-ts[0]
t_norm = (ts-ts[0])/dt*(B-1)
zeros = torch.zeros(t_norm.size())
for bi in range(B):
if temporal_bilinear:
bilinear_weights = torch.max(zeros, 1.0-torch.abs(t_norm-bi))
weights = ps*bilinear_weights
vb = events_to_image_torch(xs, ys,
weights, device, sensor_size=sensor_size,
clip_out_of_range=False)
else:
tstart = t[0] + dt*bi
tend = tstart + dt
beg = binary_search_torch_tensor(t, 0, len(ts)-1, tstart)
end = binary_search_torch_tensor(t, 0, len(ts)-1, tend)
vb = events_to_image_torch(xs[beg:end], ys[beg:end],
ps[beg:end], device, sensor_size=sensor_size,
clip_out_of_range=False)
bins.append(vb)
bins = torch.stack(bins)
return bins
def events_to_image_torch(xs, ys, ps,
device=None, sensor_size=(180, 240), clip_out_of_range=True,
interpolation=None, padding=True, default=0):
"""
Method to turn event tensor to image. Allows for bilinear interpolation.
@param xs Tensor of x coords of events
@param ys Tensor of y coords of events
@param ps Tensor of event polarities/weights
@param device The device on which the image is. If none, set to events device
@param sensor_size The size of the image sensor/output image
@param clip_out_of_range If the events go beyond the desired image size,
clip the events to fit into the image
@param interpolation Which interpolation to use. Options=None,'bilinear'
@param padding If bilinear interpolation, allow padding the image by 1 to allow events to fit:
@returns Event image from the events
"""
if device is None:
device = xs.device
if interpolation == 'bilinear' and padding:
img_size = (sensor_size[0]+1, sensor_size[1]+1)
else:
img_size = list(sensor_size)
mask = torch.ones(xs.size(), device=device)
if clip_out_of_range:
zero_v = torch.tensor([0.], device=device)
ones_v = torch.tensor([1.], device=device)
clipx = img_size[1] if interpolation is None and padding==False else img_size[1]-1
clipy = img_size[0] if interpolation is None and padding==False else img_size[0]-1
mask = torch.where(xs>=clipx, zero_v, ones_v)*torch.where(ys>=clipy, zero_v, ones_v)
img = (torch.ones(img_size)*default).to(device)
if interpolation == 'bilinear' and xs.dtype is not torch.long and xs.dtype is not torch.long:
pxs = (xs.floor()).float()
pys = (ys.floor()).float()
dxs = (xs-pxs).float()
dys = (ys-pys).float()
pxs = (pxs*mask).long()
pys = (pys*mask).long()
masked_ps = ps.squeeze()*mask
interpolate_to_image(pxs, pys, dxs, dys, masked_ps, img)
else:
if xs.dtype is not torch.long:
xs = xs.long().to(device)
if ys.dtype is not torch.long:
ys = ys.long().to(device)
try:
mask = mask.long().to(device)
xs, ys = xs*mask, ys*mask
img.index_put_((ys, xs), ps, accumulate=True)
except Exception as e:
print("Unable to put tensor {} positions ({}, {}) into {}. Range = {},{}".format(
ps.shape, ys.shape, xs.shape, img.shape, torch.max(ys), torch.max(xs)))
raise e
return img
def interpolate_to_image(pxs, pys, dxs, dys, weights, img):
"""
Accumulate x and y coords to an image using bilinear interpolation
@param pxs Numpy array of integer typecast x coords of events
@param pys Numpy array of integer typecast y coords of events
@param dxs Numpy array of residual difference between x coord and int(x coord)
@param dys Numpy array of residual difference between y coord and int(y coord)
@returns Image
"""
img.index_put_((pys, pxs ), weights*(1.0-dxs)*(1.0-dys), accumulate=True)
img.index_put_((pys, pxs+1), weights*dxs*(1.0-dys), accumulate=True)
img.index_put_((pys+1, pxs ), weights*(1.0-dxs)*dys, accumulate=True)
img.index_put_((pys+1, pxs+1), weights*dxs*dys, accumulate=True)
return img
def voxel_normalization(voxel):
"""
normalize the voxel same as https://arxiv.org/abs/1912.01584 Section 3.1
Params:
voxel: torch.Tensor, shape is [num_bins, H, W]
return:
normalized voxel
"""
# check if voxel all element is 0
a,b,c = voxel.shape
tmp = torch.zeros(a, b, c)
if torch.equal(voxel, tmp):
return voxel
abs_voxel, _ = torch.sort(torch.abs(voxel).view(-1, 1).squeeze(1))
first_non_zero_idx = torch.nonzero(abs_voxel)[0].item()
non_zero_voxel = abs_voxel[first_non_zero_idx:]
norm_idx = math.floor(non_zero_voxel.shape[0] * 0.98)
ones = torch.ones_like(voxel)
normed_voxel = torch.where(torch.abs(voxel) < non_zero_voxel[norm_idx], voxel / non_zero_voxel[norm_idx], voxel)
normed_voxel = torch.where(normed_voxel >= non_zero_voxel[norm_idx], ones, normed_voxel)
normed_voxel = torch.where(normed_voxel <= -non_zero_voxel[norm_idx], -ones, normed_voxel)
return normed_voxel
class packager():
__metaclass__ = ABCMeta
def __init__(self, name, output_path, max_buffer_size=1000000):
self.name = name
self.output_path = output_path
self.max_buffer_size = max_buffer_size
@abstractmethod
def package_events(self, xs, ys, ts, ps):
pass
@abstractmethod
def package_image(self, frame, timestamp):
pass
@abstractmethod
def package_flow(self, flow, timestamp):
pass
@abstractmethod
def add_metadata(self, num_events, num_pos, num_neg,
duration, t0, tk, num_imgs, num_flow):
pass
@abstractmethod
def set_data_available(self, num_images, num_flow):
pass
class hdf5_packager(packager):
"""
This class packages data to hdf5 files
"""
def __init__(self, output_path, max_buffer_size=1000000):
packager.__init__(self, 'hdf5', output_path, max_buffer_size)
print("CREATING FILE IN {}".format(output_path))
self.events_file = h5py.File(output_path, 'w')
self.event_xs = self.events_file.create_dataset("events/xs", (0, ), dtype=np.dtype(np.int16), maxshape=(None, ), chunks=True)
self.event_ys = self.events_file.create_dataset("events/ys", (0, ), dtype=np.dtype(np.int16), maxshape=(None, ), chunks=True)
self.event_ts = self.events_file.create_dataset("events/ts", (0, ), dtype=np.dtype(np.float64), maxshape=(None, ), chunks=True)
self.event_ps = self.events_file.create_dataset("events/ps", (0, ), dtype=np.dtype(np.bool_), maxshape=(None, ), chunks=True)
def package_bidirectional_event_voxels(self, x, y, t, p, timestamp_list, backward, bins, sensor_size, h5_name, error_txt):
"""
params:
x: ndarray, x-position of events
y: ndarray, y-position of events
t: ndarray, timestamp of events
p: ndarray, polarity of events
backward: bool, if forward or backward
timestamp_list: list, to split events via timestamp
bins: voxel num_bins
returns:
no return.
"""
# Step 1: convert data type
assert x.shape == y.shape == t.shape == p.shape
# x = torch.from_numpy(x.dtype(np.int16))
# y = torch.from_numpy(y.dtype(np.int16))
# t = torch.from_numpy(t.dtype(np.float64))
# p = torch.from_numpy(p.dtype(np.int16))
assert x.shape == y.shape == t.shape == p.shape
# Step 2: select events between two frames according to timestamp
temp = t.numpy().tolist()
output = [
temp[
bisect.bisect_left(temp, timestamp_list[i]):bisect.bisect_left(temp, timestamp_list[i+1])
]
for i in range(len(timestamp_list) - 1)
]
# Debug: Check if data error!!!
assert len(output) == len(timestamp_list) - 1, f"len(output) is {len(output)}, but len(timestamp_list) is {len(timestamp_list)}"
sum_output = []
sum = 0
for i in range(len(output)):
if len(output[i]) == 0:
raise ValueError(f"{h5_name} len(output[{i}] == 0)")
elif len(output[i]) == 1:
raise ValueError(f"{h5_name} len(output[{i}] == 1)")
sum += len(output[i])
sum_output.append(sum)
assert len(sum_output) == len(output)
# Step 3: After checking data, continue.
start_idx = 0
for voxel_idx in range(len(timestamp_list) - 1):
if len(output[voxel_idx]) == 0 or len(output[voxel_idx]) == 1:
print(f'{h5_name} len(output[{voxel_idx}])): ', len(
output[voxel_idx]))
with open(error_txt, 'a+') as f:
f.write(h5_name + '\n')
return
end_idx = start_idx + len(output[voxel_idx])
if end_idx > len(t):
with open(error_txt, 'a+') as f:
f.write(f"{h5_name} voxel_idx: {voxel_idx}, start_idx {start_idx} end_idx {end_idx} exceed bound." + '\n')
print(f"{h5_name} voxel_idx: {voxel_idx}, start_idx {start_idx} end_idx {end_idx} with exceed bound len(t) {len(t)}.")
return
image_folder = '/data/zhz/code/EvTexture-main/custom_dataset/img_seq_1/'
image = cv2.imread(image_folder + '{:05d}'.format(voxel_idx+1) + '.jpg')
self.package_image(image, timestamp_list, voxel_idx)
xs = x[start_idx:end_idx]
ys = y[start_idx:end_idx]
ts = t[start_idx:end_idx]
ps = p[start_idx:end_idx]
if ts == torch.Size([]) or ts.shape == torch.Size([1]) or ts.shape == torch.Size([0]):
with open(error_txt, 'a+') as f:
f.write(f"{h5_name} len(output[{voxel_idx}]) backward {backward} start_idx {start_idx} end_idx {end_idx} is error! Please check the data." + '\n')
print(f"{h5_name} len(output[{voxel_idx}]) backward {backward} start_idx {start_idx} end_idx {end_idx} is error! Please check the data.")
return
voxel = events_to_voxel_torch(
xs, ys, ts, ps, bins, device=None, sensor_size=sensor_size)
normed_voxel = voxel_normalization(voxel)
np_voxel = normed_voxel.numpy()
self.events_file.create_dataset("voxels_f/{:06d}".format(
voxel_idx), data=np_voxel, dtype=np.dtype(np.float64), compression="gzip")
if backward:
t_start = timestamp_list[voxel_idx]
t_end = timestamp_list[voxel_idx + 1]
xs = torch.flip(xs, dims=[0])
ys = torch.flip(ys, dims=[0])
ts = torch.flip(t_end - ts + t_start, dims=[0])
ps = torch.flip(-ps, dims=[0])
voxel = events_to_voxel_torch(
xs, ys, ts, ps, bins, device=None, sensor_size=sensor_size)
normed_voxel = voxel_normalization(voxel)
np_voxel = normed_voxel.numpy()
if backward:
self.events_file.create_dataset("voxels_b/{:06d}".format(
voxel_idx), data=np_voxel, dtype=np.dtype(np.float64), compression="gzip")
else:
self.events_file.create_dataset("voxels_f/{:06d}".format(
voxel_idx), data=np_voxel, dtype=np.dtype(np.float64), compression="gzip")
image_folder = '/data/zhz/code/EvTexture-main/custom_dataset/img_seq_1/'
image = cv2.imread(image_folder + '{:05d}'.format(voxel_idx+2) + '.jpg') # 因为上面的for循环只进行到倒数第二个,所以最后还得再加上最后一帧
self.package_image(image, timestamp_list, voxel_idx+1)
def append_to_dataset(self, dataset, data):
dataset.resize(dataset.shape[0] + len(data), axis=0)
if len(data) == 0:
return
dataset[-len(data):] = data[:]
def package_events(self, xs, ys, ts, ps):
self.append_to_dataset(self.event_xs, xs)
self.append_to_dataset(self.event_ys, ys)
self.append_to_dataset(self.event_ts, ts)
self.append_to_dataset(self.event_ps, ps)
def package_image(self, image, timestamp, img_idx):
# image_dset = self.events_file.create_dataset("images/image{:09d}".format(img_idx),
image_dset = self.events_file.create_dataset("images/{:06d}".format(img_idx),
data=image, dtype=np.dtype(np.uint8))
image_dset.attrs['size'] = image.shape
image_dset.attrs['timestamp'] = timestamp
image_dset.attrs['type'] = "greyscale" if image.shape[-1] == 1 or len(image.shape) == 2 else "color_bgr"
def package_flow(self, flow_image, timestamp, flow_idx):
flow_dset = self.events_file.create_dataset("flow/flow{:09d}".format(flow_idx),
data=flow_image, dtype=np.dtype(np.float32))
flow_dset.attrs['size'] = flow_image.shape
flow_dset.attrs['timestamp'] = timestamp
def add_event_indices(self):
datatypes = ['images', 'flow']
for datatype in datatypes:
if datatype in self.events_file.keys():
s = 0
added = 0
ts = self.events_file["events/ts"][s:s+self.max_buffer_size]
for image in self.events_file[datatype]:
img_ts = self.events_file[datatype][image].attrs['timestamp']
event_idx = np.searchsorted(ts, img_ts)
if event_idx == len(ts):
added += len(ts)
s += self.max_buffer_size
ts = self.events_file["events/ts"][s:s+self.max_buffer_size]
event_idx = np.searchsorted(ts, img_ts)
event_idx = max(0, event_idx-1)
self.events_file[datatype][image].attrs['event_idx'] = event_idx + added
def add_metadata(self, num_pos, num_neg,
duration, t0, tk, num_imgs, num_flow, sensor_size):
self.events_file.attrs['num_events'] = num_pos+num_neg
self.events_file.attrs['num_pos'] = num_pos
self.events_file.attrs['num_neg'] = num_neg
self.events_file.attrs['duration'] = tk-t0
self.events_file.attrs['t0'] = t0
self.events_file.attrs['tk'] = tk
self.events_file.attrs['num_imgs'] = num_imgs
self.events_file.attrs['num_flow'] = num_flow
self.events_file.attrs['sensor_resolution'] = sensor_size
self.add_event_indices()
def set_data_available(self, num_images, num_flow):
if num_images > 0:
self.image_dset = self.events_file.create_group("images")
self.image_dset.attrs['num_images'] = num_images
if num_flow > 0:
self.flow_dset = self.events_file.create_group("flow")
self.flow_dset.attrs['num_images'] = num_flow
config = {
'refractory_period': 1e-4,
'CT_range': [0.05, 0.5],
'max_CT': 0.5,
'min_CT': 0.02,
'mu': 1,
'sigma': 0.1,
# 'H': clip.height,
# 'H': 1216,
# 'H': 576,
'H': 180,
# 'W': clip.width,
# 'W': 1936,
# 'W': 800,
'W': 240,
'log_eps': 1e-3,
'use_log': True,
}
Cp = random.uniform(config['CT_range'][0], config['CT_range'][1])
Cn = random.gauss(config['mu'], config['sigma']) * Cp
Cp = min(max(Cp, config['min_CT']), config['max_CT'])
Cn = min(max(Cn, config['min_CT']), config['max_CT'])
esim = esim_py.EventSimulator(Cp,
Cn,
config['refractory_period'],
config['log_eps'],
config['use_log'])
image_folder = '/data/zhz/code/EvTexture-main/custom_dataset/img_seq_1'
timestamps_file = '/data/zhz/code/EvTexture-main/custom_dataset/timestamps.txt'
events = esim.generateFromFolder(image_folder, timestamps_file) # Generate events with shape [N, 4] (20686327, 4)
xs = torch.tensor(events[:,0], dtype=torch.int16)
ys = torch.tensor(events[:,1], dtype=torch.int16)
ts = torch.tensor(events[:,2], dtype=torch.float32)
# ps = torch.tensor(events[:,3], dtype=torch.bool)
ps = torch.tensor(events[:,3], dtype=torch.int16)
backward = True
bins = 5
sensor_size = (180, 240)
h5_name = 'my'
error_txt = '/data/zhz/code/EvTexture-main/custom_dataset/error.txt'
timestamp_list = [0.04*i for i in range(30)]
my_package = hdf5_packager(output_path = '/data/zhz/code/EvTexture-main/custom_dataset/my.h5')
my_package.package_bidirectional_event_voxels(xs, ys, ts, ps, timestamp_list, True, bins, sensor_size, h5_name, error_txt)![]()
再搞一个高分辨率的数据集:
![]()
![]()
推理:
python basicsr/test.py -opt options/test/EvTexture/test_EvTexture_my_Bl×4.yml
![]()


原始180*240图像:

原始720*960图像:

网络输出超分后的720*960图像:



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









